摘要:利用加速度计进行近钻头井斜动态测量时, 钻具的高速旋转、 井下强振动、强冲击环境给重力加速度测量带来极大干扰,如何从干扰噪声中有效提取重力加速度信号对于提高井斜角和工具面角的测量精度至关重要。 根据重力加速度径向和切向分量为周期性信号,轴向分量为近似直流信号,离心加速度为缓慢变化信号, 振动和冲击加速度为随机信号的特征,提出一种基于互相关检测的重力加速度信号提取方法,选择径向或切向磁力计信号作为参考信号。利用相关检测方法分别对仿真数据、实验室旋转测试数据和振动测试数据进行处理, 并计算了井斜角和工具面角,结果表明相关检测方法可以有效提取重力加速度信号,基于MEMS加速度计的井斜角测量精度优于0.5°,工具面角变化连续平滑,满足井斜动态测量需求。通过进一步开展实际钻井环境测试,该方法有望应用于近钻头地质导向系统或旋转导向钻井系统等需要近钻头井斜动态测量的场合。
一、 引言
具体的引言部分就不再赘述了,我会将截图放上,感兴趣的可以阅读一下:
二、 井斜测量方法与影响因素
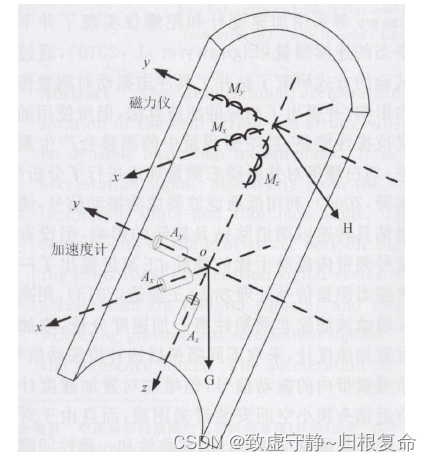
当前MWD系统使用三个加速度计测量井斜角和工具面角,使用三轴磁通门磁力计,并结合加速度计测量的井斜角和工具面角信息来计算方位角。下图所示为钻具坐标系 0 x y z 0xyz 0xyz,z轴沿钻具轴线方向,x轴沿钻具径向,y轴沿钻具切向,与x轴、z轴共同构成右手直角坐标系,三轴加速度计和三轴磁力计分别沿x、y、z方向安装。
井斜角是指钻具中轴线与铅垂线之间的夹角,其范围为0°~180°, 井斜角测量的依据是井斜不同会导致重力沿井轴及其垂向的分量发生变化。利用三个正交的加速度计测定重力加速度在 x , y , z x,y,z x,y,z轴的分量 g x , g y , g z g_x,g_y,g_z gx,gy,gz,由这三个加速度分量,可以计算出井斜角 θ \theta θ :
θ = a r c t a n g x 2 + g y 2 g z \theta = arctan\frac{\sqrt{g_x^2+g_y^2}}{g_z} θ=arctangzgx2+gy2
利用加速度分量 g x , g y g_x,g_y gx,gy计算重力工具面角:
Φ = − a r c t a n ( g y g x ) \Phi=-arctan(\frac{g_y}{g_x}) Φ=−arctan(gxgy)
近钻头动态测量时, 每个加速度计输出不仅是重力加速度分量, 还包括因仪器旋转产生的离心加速度,钻进过程中产生的振动加速度和冲击加速度。动态测量时加速度计的输出可表示:
S d y n a m i c = S g + S v + S e + S s S_{dynamic}=S_g+S_v+S_e+S_s Sdynamic=Sg+Sv+Se+Ss
式中 S g S_g Sg为重力加速度, S v S_v Sv为振动加速度, S e S_e Se为离心加速度, S s S_s Ss为冲击加速度。为有效提取重力加速度信号,进而提高井斜动态测量精度,需要从加速度计的动态测量结果中去除离心加速度、振动加速度和冲击加速度的影响。下面分别对重力加速度、离心加速度、振动加速度和冲击加速度的来源及信号特征予以讨论:
2.1 重力加速度
进行井斜动态测量时, 三轴加速度计随钻具一起绕z轴旋转,考虑到实际钻井时,井斜的变化很慢,因此重力加速度信号轴向分量 g z g_z gz固有频率接近0Hz,钻具通常转速60~400 r ⋅ m i n − 1 r·min^{-1} r⋅min−1, 因此径向分量 g x g_x gx和切向分量 g y g_y gy为周期性信号,固有频率1~6.67Hz,频率随转速一同变化。
2.2 离心加速度
离心加速度是由于钻进过程中加速度计随钻具旋转产生离心力造成的, 离心加速度的方向沿角速度的法线方向,其大小与转速、测量点与井眼轴线垂直距离有关。距离取决于加速度计安装位置一旦安装完毕即为恒定值,因此离心加速度随转速的升高而增大。考虑到钻井过程中,在短时间内转速基本不变或缓慢变化,因此离心加速度为常量或缓慢变化量。当钻具钻速较高时,通过高通滤波器可以滤除离心加速度,但转速较低时高通滤波效果欠佳。
2.3 振动加速度
在钻进过程中,钻柱与井壁、钻头与岩石之间的相互作用使钻具受力,从而产生三种主要形式的复杂振动:扭转振动、轴向振动和横向振动,不同振动形式之间又存在相互联系,相互转化及影响,振动模态复杂。振动加速度为随机信号,影响频带范围很宽,对于重力加速度固有频带外的振动干扰可以利用低通滤波器进行滤除,但对于落人重力加速度信号固有频带内的振动干扰,依靠低通滤波并不能进行滤除。
2.4 冲击加速度
当对钻头施加过大的钻压、钻进坚硬地层、地层软硬交替造成钻压失稳时,钴头会产生严重蹩跳,进而传递到整个钻柱,产生强烈的冲击。冲击干扰不但会损伤钻头牙齿,降低钻头寿命, 严重时还会导致MWD仪器精密电子部件的损坏。通常钻具轴向受到的冲击最大,冲击加速度特点是随机产生,并非常态,量级很大,但维持时间很短。从加速度计输出信号来看,呈现出尖峰或阶跃干扰的特点,使得记录的原始数据出现突变点。冲击干扰同样具有影响频谱范围较大的特点。
综上所述,重力加速度径向和切向分量为周期性信号,轴向分量为近似直流信号,离心加速度为缓慢变化信号,振动和冲击加速度均为随机信号,但干扰频带较宽,常规滤波方法对重力加速度固有频带内的干扰难以滤除。
三、基于相关检测的重力加速度提取方法
3.1 相关检测的噪声抑制原理
相关检测的本质是测量两个时域信号的相似性。对于确定性信号,在不同时刻的取值具有较强的相关性;对于噪声信号,因为其随机性较强,不同时刻取值的相关性通常较差,相关检测正是利用这一差异可以把确定性信号和干扰噪声区分开来。
设两路同频率的正弦信号分别叠加了噪声n(t)和v(t),表达式如下 :
x ( t ) = A s i n ( ω 0 t + ψ ) + n ( t ) ) , x(t)=Asin(\omega_0 t+\psi)+n(t)), x(t)=Asin(ω0t+ψ)+n(t)),
y ( t ) = B s i n ( ω 0 t + θ ) + v ( t ) ) , y(t)=Bsin(\omega_0 t+\theta)+v(t)), y(t)=Bsin(ω0t+θ)+v(t)),
由于噪声与信号互不相关, 且两噪声为非同源随机噪声, 则x(t)与y(t)的互相关函数为 R x y ( τ ) = 1 2 π ∫ 0 2 π x ( t − τ ) y ( t ) d t = A B 2 c o s ( ω 0 τ + ψ − θ ) R_{xy}(\tau)=\frac{1}{2\pi}\int_{0}^{2\pi}x(t-\tau)y(t)dt=\frac{AB}{2}cos(\omega_0 \tau+\psi-\theta) Rxy(τ)=2π1∫02πx(t−τ)y(t)dt=2ABcos(ω0τ+ψ−θ)
从上式可知,互相关函数只含有两个同频信号的幅度和相位差,噪声得到抑制。
3.2 含干扰噪声的加速度计测量信号
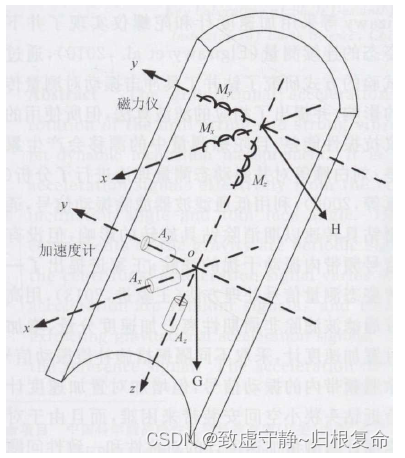
进行近钻头井斜角动态测量时,三个加速度计的安装方式如下图所示
钻进时加速度计随钻具一起绕z轴旋转,设钻具的旋转角速度为 ω \omega ω,单位为 r a d ⋅ s − 1 rad·s^{-1} rad⋅s−1,模数转换器对信号的采样频率为 f s f_s fs ,单位为Hz,采样间隔为 T s T_s Ts ,则沿x轴方向安装的加速度计输出信号为: a ˉ x ( k ) = A x c o s ( ω × k × T s + ψ ) + n x ( k ) = g x ( k ) + n x ( k ) \bar a_x(k)=A_xcos(\omega×k×T_s+\psi)+n_x(k)=g_x(k)+n_x(k) aˉx(k)=Axcos(ω×k×Ts+ψ)+nx(k)=gx(k)+nx(k)
ψ \psi ψ为x轴加速度计的输出信号初始相位, g x ( k ) g_x(k) gx(k)为不含噪声的x轴重力加速度信号,固有频率与转速相同, n x ( k ) n_x(k) nx(k)为包括电路产生的随机噪声、钻具旋转产生的离心加速度干扰、钻具受到横向振动及冲击干扰等在内的各种干扰噪声信号。
y轴方向的加速度计输出信号与x轴方向的加速度计输出信号在相位上相差90°,则有 a ˉ y ( k ) = A y c o s ( ω × k × T s + ψ − π 2 ) + n y ( k ) = A x s i n ( ω × k × T s + ψ ) + n y ( k ) = g y ( k ) + n y ( k ) \bar a_y(k)=A_ycos(\omega×k×T_s+\psi-\frac{\pi}{2})+n_y(k)=A_xsin(\omega×k×T_s+\psi)+n_y(k)=g_y(k)+n_y(k) aˉy(k)=Aycos(ω×k×Ts+ψ−2π)+ny(k)=Axsin(ω×k×Ts+ψ)+ny(k)=gy(k)+ny(k)
g y ( k ) g_y(k) gy(k)为不含噪声的y轴重力加速度信号,固有频率与转速相同,为包括电路产生的随机噪声、钻具旋转产生的切向加速度干扰、钻具受到横向振动及冲击干扰等在内的各种干扰噪声信号。
理论上z轴方向的加速度计输出信号不受旋转的影响, 则有 a ˉ z ( k ) = g z ( k ) + n z ( k ) \bar a_z(k)=g_z(k)+n_z(k) aˉz(k)=gz(k)+nz(k)
g z ( k ) g_z(k) gz(k)为不含噪声的z轴重力加速度信号,为包括电路产生的随机噪声、钻具受到轴向振动及冲击干扰等在内的干扰噪声信号。z轴重力加速度信号为接近直流的缓慢变化信号,根据z轴重力加速度信号与振动冲击干扰的频带差异及电路噪声的随z轴重力加速度信号。
3.3 参考信号的构建
对于x轴和轴重力加速度信号,由于固有频率与转速相同,对于频率低于其固有频率的各种干扰噪声,常规的低通滤波器或滑动平均滤波器无法实现抑制,为此采用相关检测的手段进行提取,首先需要构建一参考信号。参考信号的构建原则是与被测信号同频率,且对振动和冲击干扰不敏感,如磁力计测量的因旋转产生的磁场分量变化信号,或者陀螺仪或光电编码器测量的因旋转产生的角度周期性变化信号。
由于磁力计在钻具径向或切向(x和y方向)测出的信号较好,不受振动和冲击的影响,频率随转速同步变化,且磁力计在MWD 系统中固有,无需增加额外的参考信号测量传感器和电路,为此本文选用敏感轴与x轴(或y轴)平行的磁力计的输出信号作为参考信号, 并对幅度进行归一化,现以x轴磁力计为例,可表示为 r ˉ x ( k ) = c o s ( ω × k × T s ) + n r ( k ) = r x ( k ) + n r ( k ) \bar{r}_x(k)=cos(\omega×k×T_s)+n_r(k)=r_x(k)+n_r(k) rˉx(k)=cos(ω×k×Ts)+nr(k)=rx(k)+nr(k)
3.4 互相关信号提取
x轴和y 轴加速度计测得的信号分别与磁力计的参考信号知关,公式 a ˉ x ( k ) = A x c o s ( ω × k × T s + ψ ) + n x ( k ) = g x ( k ) + n x ( k ) \bar a_x(k)=A_xcos(\omega×k×T_s+\psi)+n_x(k)=g_x(k)+n_x(k) aˉx(k)=Axcos(ω×k×Ts+ψ)+nx(k)=gx(k)+nx(k)与公式 r ˉ x ( k ) = c o s ( ω × k × T s ) + n r ( k ) = r x ( k ) + n r ( k ) \bar{r}_x(k)=cos(\omega×k×T_s)+n_r(k)=r_x(k)+n_r(k) rˉx(k)=cos(ω×k×Ts)+nr(k)=rx(k)+nr(k)进行互相关运算,得到x轴加速度与磁力计的相关信号: R ˉ a x r x ( τ ) = 1 N ∑ k = 0 N − 1 a ˉ x ( k + τ ) × r ˉ x ( k ) = R a x r x ( τ ) + R a x n r ( τ ) + R r x n x ( τ ) + R n x n r ( τ ) \bar{R}_{a_xr_x}(\tau)=\frac{1}{N}\sum_{k=0}^{N-1}\bar{a}_x(k+\tau)×\bar{r}_x(k)=R_{a_xr_x}(\tau)+R_{a_xn_r}(\tau)+R_{r_xn_x}(\tau)+R_{n_xn_r}(\tau) Rˉaxrx(τ)=N1k=0∑N−1aˉx(k+τ)×rˉx(k)=Raxrx(τ)+Raxnr(τ)+Rrxnx(τ)+Rnxnr(τ)
上式中,正弦信号与随机噪声不相关,因此 R a x n r ( τ ) R_{a_xn_r}(\tau) Raxnr(τ)和 R r x n x ( τ ) R_{r_xn_x}(\tau) Rrxnx(τ)为零;因磁力计对振动信号不敏感,因此加信号的随机噪声与磁参考信号的随机噪声相关性很弱, 因此 R n x n r ( τ ) ≈ 0 R_{n_xn_r}(\tau)\approx0 Rnxnr(τ)≈0。
R ˉ a x r x ( τ ) = R a x r x ( τ ) = A x 2 c o s ( ω τ + ψ ) \bar{R}_{a_xr_x}(\tau)=R_{a_xr_x}(\tau)=\frac{A_x}{2}cos(\omega\tau+\psi) Rˉaxrx(τ)=Raxrx(τ)=2Axcos(ωτ+ψ)
同理, 公式 a ˉ y ( k ) = A y c o s ( ω × k × T s + ψ − π 2 ) + n y ( k ) = A x s i n ( ω × k × T s + ψ ) + n y ( k ) = g y ( k ) + n y ( k ) \bar a_y(k)=A_ycos(\omega×k×T_s+\psi-\frac{\pi}{2})+n_y(k)=A_xsin(\omega×k×T_s+\psi)+n_y(k)=g_y(k)+n_y(k) aˉy(k)=Aycos(ω×k×Ts+ψ−2π)+ny(k)=Axsin(ω×k×Ts+ψ)+ny(k)=gy(k)+ny(k)与公式 r ˉ x ( k ) = c o s ( ω × k × T s ) + n r ( k ) = r x ( k ) + n r ( k ) \bar{r}_x(k)=cos(\omega×k×T_s)+n_r(k)=r_x(k)+n_r(k) rˉx(k)=cos(ω×k×Ts)+nr(k)=rx(k)+nr(k)进行互相关运算,得到y轴加速度与磁力计的相关信号。
R ˉ a y r x ( τ ) = 1 N ∑ k = 0 N − 1 a ˉ y ( k + τ ) × r ˉ x ( k ) = R a y r x ( τ ) + R a y n r ( τ ) + R r x n y ( τ ) + R n y n r ( τ ) \bar{R}_{a_yr_x}(\tau)=\frac{1}{N}\sum_{k=0}^{N-1}\bar{a}_y(k+\tau)×\bar{r}_x(k)=R_{a_yr_x}(\tau)+R_{a_yn_r}(\tau)+R_{r_xn_y}(\tau)+R_{n_yn_r}(\tau) Rˉayrx(τ)=N1k=0∑N−1aˉy(k+τ)×rˉx(k)=Rayrx(τ)+Raynr(τ)+Rrxny(τ)+Rnynr(τ)
R ˉ a y r x ( τ ) = R a y r x ( τ ) = A y 2 s i n ( ω τ + ψ ) \bar{R}_{a_yr_x}(\tau)=R_{a_yr_x}(\tau)=\frac{A_y}{2}sin(\omega\tau+\psi) Rˉayrx(τ)=Rayrx(τ)=2Aysin(ωτ+ψ)
最后可以得到:
g x ( t ) = 2 × R ˉ a x r x ( t ) = A x c o s ( ω t + ψ ) g_x(t)=2×\bar{R}_{a_xr_x}(t)=A_xcos(\omega t+\psi) gx(t)=2×Rˉaxrx(t)=Axcos(ωt+ψ)
g y ( t ) = 2 × R ˉ a y r x ( t ) = A y c o s ( ω t + ψ ) g_y(t)=2×\bar{R}_{a_yr_x}(t)=A_ycos(\omega t+\psi) gy(t)=2×Rˉayrx(t)=Aycos(ωt+ψ)
g x ( t ) g_x(t) gx(t)、 g y ( t ) g_y(t) gy(t)为去除干扰噪后的x、y轴方向的重力加速度信号。
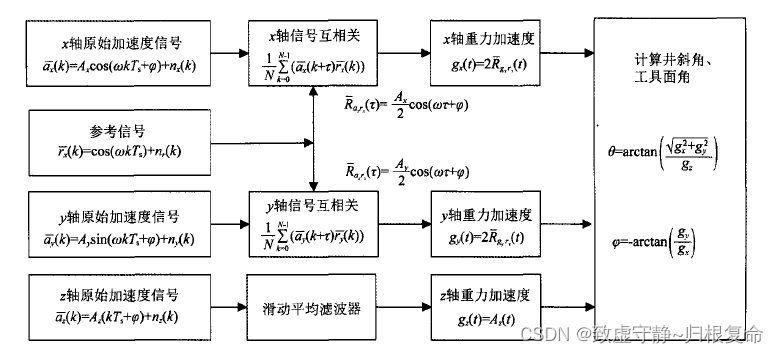
基于上述互相关检测方法提取的x轴和y轴重力加速度信号,以及低通滤波或滑动平均滤波提取的z 轴重力加速度信号,代人公式 θ = a r c t a n g x 2 + g y 2 g z \theta = arctan\frac{\sqrt{g_x^2+g_y^2}}{g_z} θ=arctangzgx2+gy2和 Φ = − a r c t a n ( g y g x ) \Phi=-arctan(\frac{g_y}{g_x}) Φ=−arctan(gxgy), 即可计算井斜角和工具面角。基于相关检测的重力加速度提取方法原理框图如下图所示。
3.5 提取算法仿真验证
为了验证相关检测方法的噪声抑制能力及重力加速度信号提取精度,采用matlab进行了仿真。设定井斜角30°,钻具转速 150 r ⋅ m i n − 1 150r·min^{-1} 150r⋅min−1,采样率203.45Hz,采样点数2000,对于三个加速度计输出信号分别叠加了不同幅度的宽带白噪声来模拟振动干扰, 同时x轴和y轴加速度计还加入直流偏置来模拟离心加速度和切向加速度。对于参考信号叠加了幅度较小的白噪声模拟电路噪声。加速度计信号和参考信号具体参数如下表所示。

其时间序列波形见下图。
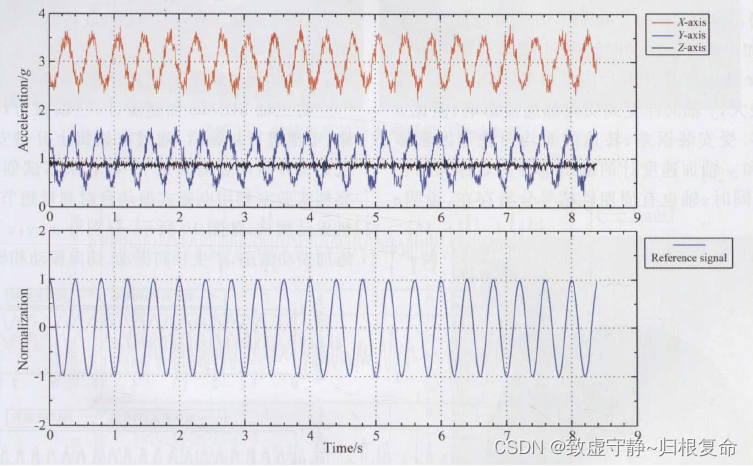
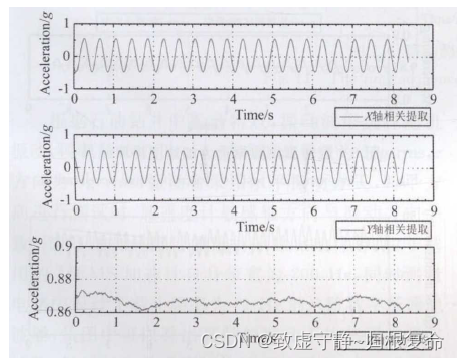
下图为利用相关检测方法提取的x轴和y轴重力加速度信号,以及利用滑动平均滤波器提取的z轴重力加速度信号,可以看出相关检测方法可以有效从叠加了高斯白噪声和直流偏置的信号中将有用信号提取出来,说明该提取方法对离心加速度产生的直流偏置及振动加速度等随机干扰具有抑制能力。
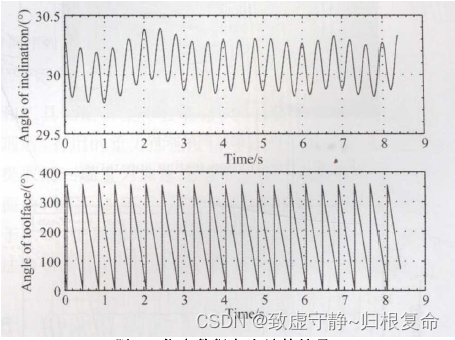
下图为利用三轴重力加速度的提取结果计算的井斜角和重力工具面角,可以看出井斜角精度优于0.5°,工具面角变化连续平滑。
四、往期回顾
课题学习(一)----静态测量
课题学习(二)----倾角和方位角的动态测量方法(基于磁场的测量系统)
课题学习(三)----倾角和方位角的动态测量方法(基于陀螺仪的测量系统)
课题学习(四)----四元数解法
课题学习(五)----阅读论文《抗差自适应滤波的导向钻具动态姿态测量方法》
课题学习(六)----安装误差校准、实验方法
课题学习(七)----粘滑运动的动态算法
课题学习(八)----卡尔曼滤波动态求解倾角、方位角
课题学习(九)----阅读《导向钻井工具姿态动态测量的自适应滤波方法》论文笔记
课题学习(十)----阅读《基于数据融合的近钻头井眼轨迹参数动态测量方法》论文笔记
课题学习(十一)----阅读《Attitude Determination with Magnetometers and Accelerometers to Use in Satellite》
课题学习(十二)----阅读《Extension of a Two-Step Calibration Methodology to Include Nonorthogonal Sensor Axes》
课题学习(十三)----阅读《Calibration of Strapdown Magnetometers in Magnetic Field Domain》论文笔记
课题学习(十四)----三轴加速度计+三轴陀螺仪传感器-ICM20602
课题学习(十五)----阅读《测斜仪旋转姿态测量信号处理方法》论文
课题学习(十六)----阅读《Continuous Wellbore Surveying While Drilling Utilizing MEMS Gyroscopes Based…》论文
课题学习(十七)----姿态更新的四元数算法总结
课题学习(十八)----捷联测试电路设计与代码实现(基于MPU6050和QMC5883L)
课题学习(十九)----Allan方差:陀螺仪噪声分析