一、项目背景及目的
随着各种工业生产设备和机械设备的广泛使用,直流电机调速技术的研究和应用越来越受到人们的重视,具有广泛的应用前景。本项目通过51单片机实现直流电机调速功能,为实际工程应用提供一个可靠和有效的调速方案。

二、设计思路
如果需要下载项目工程,可以去这里:
https://blog.csdn.net/xiaolong1126626497/category_10192120.html
(1)系统原理
本系统采用PWM(脉冲宽度调制)技术对直流电机进行调速控制。通过改变输出信号的占空比,实现对直流电机的转速控制。系统中包括51单片机、直流电机、电路板以及控制程序。
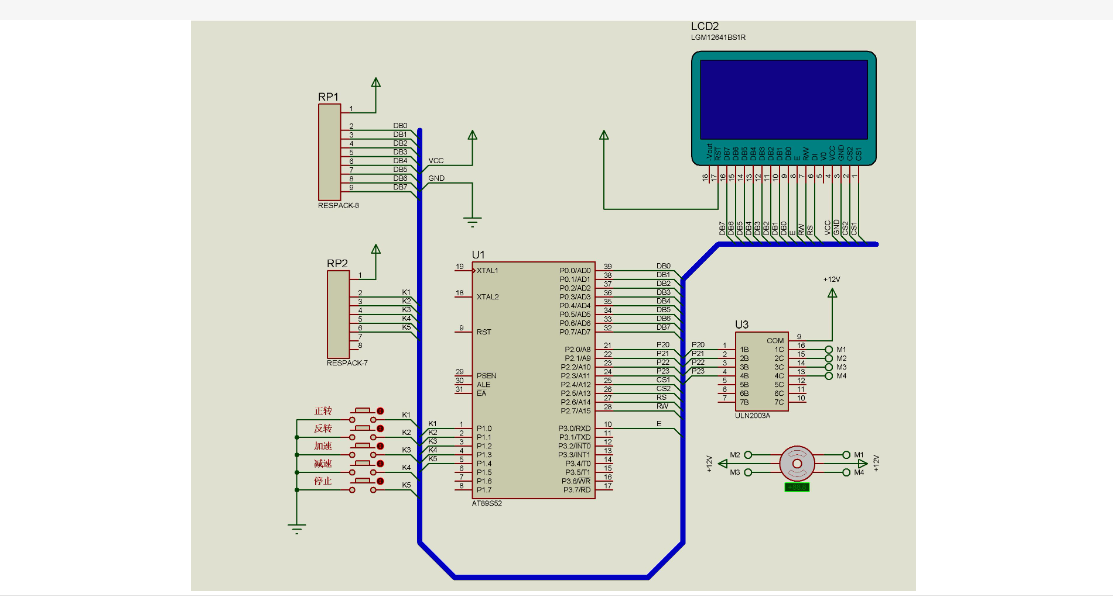
(2)硬件设计
- 电机:使用24V直流电机实现实际转速控制。
- 驱动电路:使用四个寄生二极管三相全桥驱动电路控制电机,使电机可以正反转,并控制电机的速度。
- 51单片机:使用STC89C52单片机,作为控制核心。单片机通过捕捉外部信号和计算控制电压来实现对电机的转速控制。同时还需通过编写程序来控制电机的启动、停止等操作。
- 显示器:使用1602LCD显示屏,显示转速和其他操作信息。
- 电源:使用24V直流电源作为系统的电源。
(3)软件设计
- 采用C语言编写单片机程序进行控制。
- 实现PWM技术控制直流电机的转速。通过调整占空比来改变输出电压,从而达到控制直流电机转速的目的。
- 使用定时器模块实现计数来测量电机的转速,并通过显示器实时显示。
- 设定按键和旋钮控制,如启动、停止电机等。
三、设计代码
#include <reg52.h>sbit MotorP = P1^0; //定义电机正极口
sbit MotorN = P1^1; //定义电机负极口
float V_motor = 0; //定义电机控制电压
unsigned int speed = 0; //定义电机转速//初始化函数
void Init()
{//定时器计数器及工作模式设置TMOD |= 0x01; //T0定时器模式1TH0 = 0xfc; //定时计数最大值,控制PWM频率TL0 = 0x00; //初值为0TR0 = 1; //启动T0定时器//ADC设置ADC_CONTR = 0x84; //启动AD转换器
}//ADC采样函数
float ADConvert()
{ADC_CONTR &= 0xEF; //清除AD转换结束标志位ADC_CONTR |= 0x40; //启动AD转换while(!(ADC_CONTR & 0x10)); //等待转换完成return ADC_RES; //返回转换结果
}//计算电机控制电压函数
void ControlMotor()
{unsigned int value = ADConvert(); //采集电位器输出V_motor = (value / 1023.0) * 5; //根据电压分压公式计算电机控制电压
}//控制电机函数
void DriveMotor()
{if(V_motor >= 2.5) //当电位器输出电压大于2.5V时电机正转,当小于2.5V时电机反转{MotorP = 1;MotorN = 0;}else if(V_motor < 2.5){MotorP = 0;MotorN = 1;}speed = 60 * 1000 / (3 * TH0 * 12); //根据定时器计数值计算电机转速
}//显示函数
void Display()
{//将电机转速和状态信息显示在LCD显示屏上
}//主函数
void main()
{Init(); //初始化函数while(1){ControlMotor(); //计算电机控制电压DriveMotor(); //控制电机运行Display(); //显示电机状态}
}
![[迁移学习]领域泛化](https://img-blog.csdnimg.cn/3e5c5aca96b748c893f1f4673847a31c.png)