车辆路径优化问题变体及数学模型
- 一、旅行商问题(Travelling salesman problem,TSP)
- TSP问题数学模型
- TSP问题求解
- 二、车辆路径问题(Vehicle Routing Problem,VRP)
- 三、带容量约束的车辆路径优化问题(Capacitated Vehicle Routing Problem,CVRP)
- CVRP问题求解
- 四、带时间窗车辆路径优化问题(Vehicle Routing Problem with Time Window,VRPTW)
- VRPTW问题求解
- 五、取送货问题数学模型(Homogeneous Multi vehicle pickup and delivery problem formulations)
- PDPTW问题求解
车辆路径优化问题(Vehicle Routing Problem,VRP)是一种非常常见的优化问题,在给定一组客户点、车辆容量、车辆数量、起始点和终点,目标是找到使得所有客户点都被访问一次的最短路径方案。VRP有很多变体:
- 旅行商问题(Travelling salesman problem,TSP) the classic routing problem in which there is just one vehicle.
- 车辆路径问题(Vehicle Routing Problem,VRP), a generalisation of the TSP with multiple vehicles.
- VRP with capacity constraints, in which vehicles have maximum capacities for the items they can carry.
- 带时间窗的车辆路径规划问题(VRP with time windows,VRPTW),where the vehicles must visit the locations in specified time intervals.
- VRP with resource constraints, such as space or personnel to load and unload vehicles at the depot (the starting point for the routes).
- VRP with dropped visits, where the vehicles aren’t required to visit all locations, but must pay a penalty for each visit that is dropped.
一、旅行商问题(Travelling salesman problem,TSP)
最经典的的车辆路径优化问题是旅行商问题(Travelling salesman problem,TSP),给定一系列城市和每对城市之间的距离,求解访问每一座城市一次并回到起始城市的最短回路。
TSP问题数学模型
刘兴禄 -《运筹优化常用模型、算法及案例实战:Python+Java实现》总结了TSP问题共有3种数学模型:
- Dantzig-Fulkerson-Johnson model,DFJ模型(本文采用)
- Miller-Tucker-Zemlin model,MTZ模型
- 1-tree模型
DFJ模型,也是最常见的模型如下:
min ∑ i ∈ V ∑ j ∈ V d i j x i j subject to ∑ j ∈ V x i j = 1 , ∀ i ∈ V , i ≠ j ∑ i ∈ V x i j = 1 , ∀ j ∈ V , i ≠ j ∑ i , j ∈ S x i j ≤ ∣ S ∣ − 1 , 2 ≤ ∣ S ∣ ≤ N − 1 , S ⊂ V x i j ∈ { 0 , 1 } , ∀ i , j ∈ V \begin{align} \min \quad & \sum_{i \in V}{}\sum_{j \in V} d_{ij}x_{ij}\\ \text{subject to} \quad &\sum_{j \in V} x_{ij} = 1, \quad \forall i \in V,i \neq j \\ &\sum_{i \in V}{x_{ij}} =1,\quad \forall j \in V ,i \neq j\\ & \textcolor{red}{\sum_{i,j \in S}{x_{ij}} \leq |S|-1,\quad 2\leq |S| \leq N-1, S \subset V}\\ &x_{ij} \in \{0,1\}, \quad \forall i,j \in V \end{align} minsubject toi∈V∑j∈V∑dijxijj∈V∑xij=1,∀i∈V,i=ji∈V∑xij=1,∀j∈V,i=ji,j∈S∑xij≤∣S∣−1,2≤∣S∣≤N−1,S⊂Vxij∈{0,1},∀i,j∈V
这个subtour-elimination的约束,是一个枚举的约束,我们不能在建模的时候就直接全枚举,这样的话有复杂度的情况。等到把这些约束枚举完,黄花菜都凉了。 啰嗦几句,subtour-elimination的思路就是相当于cutting plane。在原来前两个约束的基础上,加上这个约束。但是如果你要在求解步骤model.optimize()之前就想全枚举,把subtour-elimination所有可能的
个约束全加上去,其他的不论,就只是加约束所耗费的时间,别人TSP早都解完去写Paper了,你这边约束还没加完。得不偿失,因此不能硬钢去枚举。
那怎么办呢?业内一般采用Gurobi或者CPLEX求解器中提供的callback(回调函数)的方法来动态的添加subtour-elimination约束。总的来讲,就是在branch and bound tree迭代的过程中,根据当前结点的松弛后的线性规划模型(relaxed LP)的解,来检查该解是否有存在子环路 subtour,如果有,我们就把执行subtour-elimination时候产生的破圈约束加到正在求解的模型中去; 如果没有,我们就直接接着迭代算法。
TSP问题求解
- TSP中两种不同消除子环路的方法及callback实现
- 基于蚁群算法的TSP问题建模求解(Python)
- 基于模拟退火算法的TSP问题建模求解(Python)
- 基于自适应遗传算法的TSP问题建模求解(Java)
- 基于禁忌搜索的TSP问题建模求解(Java)
二、车辆路径问题(Vehicle Routing Problem,VRP)
基本车辆路径问题(Vehicle Routing Problem,VRP)的数学模型可以使用整数线性规划(Integer Linear Programming,ILP)来表示。
min ∑ k ∈ V ∑ i ∈ N ∑ j ∈ N c i j x i j k subject to ∑ k ∈ V ∑ j ∈ N x i j k = 1 , ∀ i ∈ C ∑ j ∈ N x 0 j k = 1 , ∀ k ∈ V , ∑ i ∈ N x i h k − ∑ j ∈ N x h j k = 0 , ∀ h ∈ C , ∀ k ∈ V , ∑ i ∈ N x i , n + 1 , k = 1 ∀ k ∈ V , s i k + t i j − M i j ( 1 − x i j k ) ⩽ s j k , ∀ i , j ∈ N , ∀ k ∈ V , a i ⩽ s i k ⩽ b i , ∀ i ∈ N , ∀ k ∈ V , x i j k ∈ { 0 , 1 } , ∀ i , j ∈ N , ∀ k ∈ V s i k ≥ 0 , ∀ i ∈ N , ∀ k ∈ V \begin{align} \min \quad &\sum_{k \in \mathcal{V}} \sum_{i \in \mathcal{N}} \sum_{j \in \mathcal{N}} c_{i j} x_{i j k} \\ \text {subject to} \quad &\sum_{k \in \mathcal{V}} \sum_{j \in \mathcal{N}} x_{i j k}=1, \quad \forall i \in \mathcal{C} \\ &\sum_{j \in \mathcal{N}} x_{0 j k}=1, \quad \forall k \in \mathcal{V}, \\ &\sum_{i \in \mathcal{N}} x_{i h k}-\sum_{j \in \mathcal{N}} x_{h j k}=0 , \quad \forall h \in \mathcal{C}, \forall k \in \mathcal{V}, \\ &\sum_{i \in \mathcal{N}} x_{i, n+1, k}=1 \quad \forall k \in \mathcal{V}, \\ &s_{i k}+t_{i j}-M_{i j}\left(1-x_{i j k}\right) \leqslant s_{j k}, \quad \forall i, j \in \mathcal{N}, \forall k \in \mathcal{V}, \\ &a_{i} \leqslant s_{i k} \leqslant b_{i} , \quad \forall i \in \mathcal{N}, \forall k \in \mathcal{V} \text {, } \\ &x_{i j k} \in\{0,1\}, \quad \forall i, j \in \mathcal{N}, \forall k \in \mathcal{V} \\ &s_{i k} \geq 0, \quad \forall i \in \mathcal{N}, \forall k \in \mathcal{V} \\ \end{align} minsubject tok∈V∑i∈N∑j∈N∑cijxijkk∈V∑j∈N∑xijk=1,∀i∈Cj∈N∑x0jk=1,∀k∈V,i∈N∑xihk−j∈N∑xhjk=0,∀h∈C,∀k∈V,i∈N∑xi,n+1,k=1∀k∈V,sik+tij−Mij(1−xijk)⩽sjk,∀i,j∈N,∀k∈V,ai⩽sik⩽bi,∀i∈N,∀k∈V, xijk∈{0,1},∀i,j∈N,∀k∈Vsik≥0,∀i∈N,∀k∈V
三、带容量约束的车辆路径优化问题(Capacitated Vehicle Routing Problem,CVRP)
带容量约束的车辆路径优化问题,CVRP,对一系列装卸货点进行适当的路径规划,在满足约束条件(客户需求、车辆载重和容积、车型、车辆行驶里程、配送中心数量等限制)和目标最优化(路程最短、成本最低、使用车辆数最少、配送时间最快等)下,将客户的配送需求从配送中心送达客户点,或从客户点送回配送中心。
场景:
单向:纯取货 / 纯送货;
单配送中心:只有一个配送中心/车场;
单车型:只考虑一种车型,
需求不可拆分:客户需求只能有一辆车满足;
车辆封闭:完成配送任务的车辆需回到配送中心;
车辆充足:不限制车辆数量,即配送车辆需求均能满足;
非满载:任意客户点的需求量小于车辆最大载重;
要求:
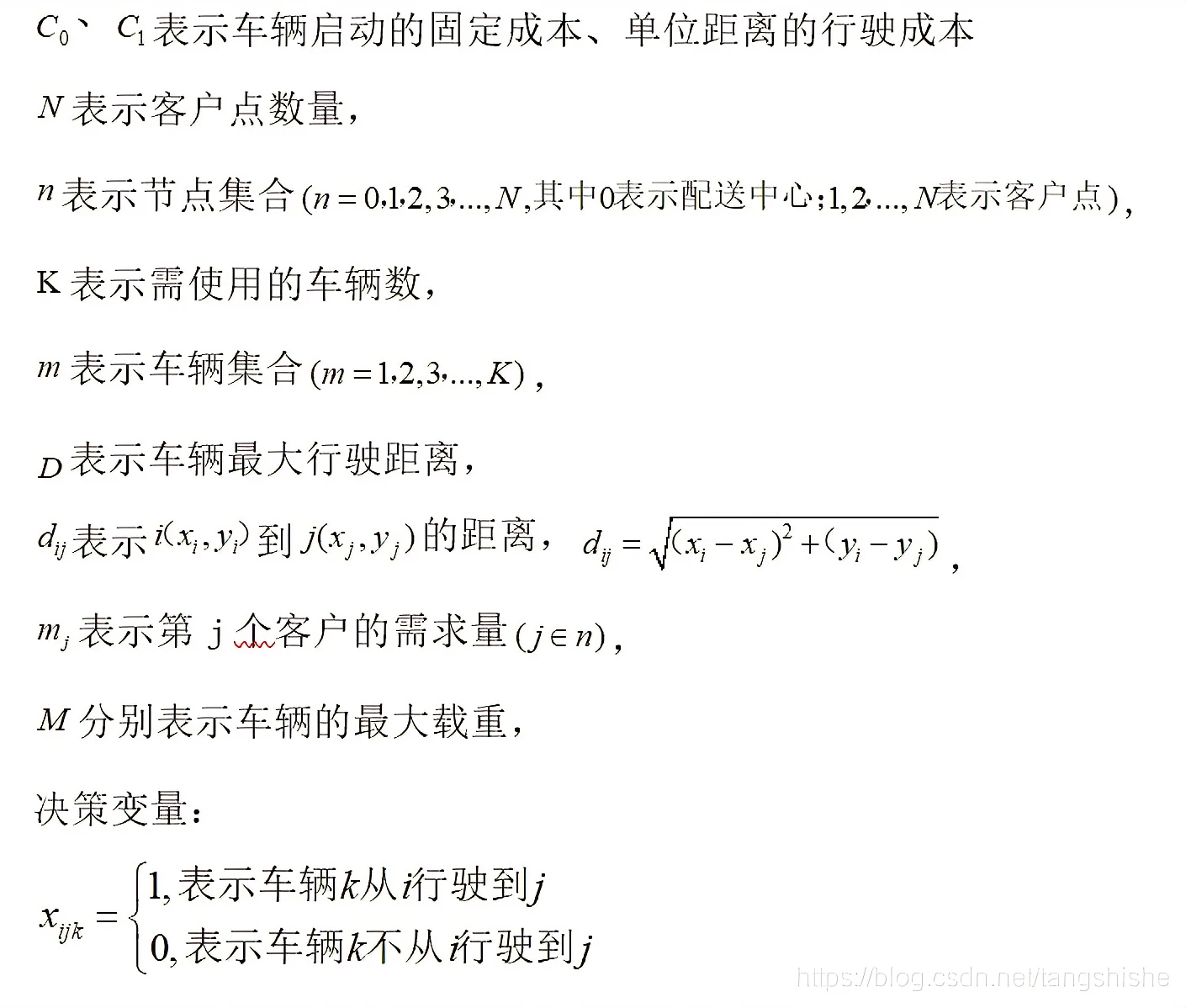
优化目标:最小化车辆启动成本和车辆行驶成本之和;
约束条件:车辆行驶距离约束,重量约束;
算法输入:配送中心位置、客户点位置、客户点需求、车辆最大载重、车辆最大行驶距离、车辆启动成本、车辆单位距离行驶成本;
算法输出:每辆车的行驶路径,经过的客户点,以及总成本。

CVRP问题求解
基于遗传算法的CVRP建模求解(Python)
四、带时间窗车辆路径优化问题(Vehicle Routing Problem with Time Window,VRPTW)
问题描述
VRPTW问题定义在一队车辆 V \mathcal{V} V、一组客户 C \mathcal{C} C和一个有向图 G \mathcal{G} G上。图由 ∣ C ∣ + 2 |\mathcal{C}|+2 ∣C∣+2个点组成,其中客户由 1 , 2 , ⋯ , n 1,2,\cdots,n 1,2,⋯,n表示,车站由 0 0 0(始发站)和 n + 1 n+1 n+1(终点站)表示。所有节点的集合可表示为 N = { 0 , 1 , 2 , ⋯ , n , n + 1 } \mathcal{N}=\{0,1,2,\cdots,n,n+1\} N={0,1,2,⋯,n,n+1}。所有边的集合 A \mathcal{A} A表示了车站与客户之间,以及客户之间的有向连接。其中没有边从 0 0 0点终止或者从 n + 1 n+1 n+1点开始。每一条弧 ( i , j ) , i ≠ j (i,j),i\neq j (i,j),i=j都对应一个成本 c i j c_{ij} cij和时间 t i j t_{ij} tij,时间可以包括在弧上 ( i , j ) (i,j) (i,j)的行驶时间和在 i i i点的服务时间。所有车辆通常是同质化的,每辆车都存在容量上限 Q Q Q,每一个客户点 i i i都有需要被满足的需求 d i d_i di,并且需要在时间窗 [ a i , b i ] [a_i,b_i] [ai,bi]之内被服务[1]。待优化的问题即为,如何决策车辆访问客户的路径,使得在满足一定约束的条件下,实现最小化总成本的目标。
模型构建
参数
- V \mathcal{V} V:车辆集合, V = { 0 , 1 , ⋯ , V } \mathcal{V}=\{0,1,\cdots, V\} V={0,1,⋯,V};
- C \mathcal{C} C:客户集合, C = { 0 , 1 , ⋯ , n } \mathcal{C}=\{0,1,\cdots, n\} C={0,1,⋯,n};
- N \mathcal{N} N:节点集合, N = { 0 , 1 , 2 , ⋯ , n , n + 1 } \mathcal{N}=\{0,1,2,\cdots,n,n+1\} N={0,1,2,⋯,n,n+1};
- c i j c_{ij} cij:从 i i i到 j j j的行驶距离;
- d i d_i di:每一个客户点 i i i都有需要被满足的需求量;
- Q Q Q:车辆容量;
- t i j t_{ij} tij:从 i i i点到 j j j点的行驶时间,以及服务 i i i点的时间之和;
- [ a i , b i ] [a_i,b_i] [ai,bi]:访问 i i i点的时间窗;
- M i j M_{ij} Mij:足够大的正数。
决策变量
- x i j k x_{ijk} xijk:车辆路径决策变量, x i j k = 1 x_{ijk}=1 xijk=1,车辆 k k k经过弧 ( i , j ) (i,j) (i,j)。
- s i k s_{ik} sik:车辆 k k k服务 i i i点的开始时刻;
混合整数规划模型
min ∑ k ∈ V ∑ i ∈ N ∑ j ∈ N c i j x i j k subject to ∑ i ∈ C d i ∑ j ∈ N x i j k ⩽ Q , ∀ k ∈ V , ∑ k ∈ V ∑ j ∈ N x i j k = 1 , ∀ i ∈ C ∑ j ∈ N x 0 j k = 1 , ∀ k ∈ V , ∑ i ∈ N x i h k − ∑ j ∈ N x h j k = 0 , ∀ h ∈ C , ∀ k ∈ V , ∑ i ∈ N x i , n + 1 , k = 1 ∀ k ∈ V , s i k + t i j − M i j ( 1 − x i j k ) ⩽ s j k , ∀ i , j ∈ N , ∀ k ∈ V , a i ⩽ s i k ⩽ b i , ∀ i ∈ N , ∀ k ∈ V , x i j k ∈ { 0 , 1 } , ∀ i , j ∈ N , ∀ k ∈ V s i k ≥ 0 , ∀ i ∈ N , ∀ k ∈ V \begin{align} \min \quad &\sum_{k \in \mathcal{V}} \sum_{i \in \mathcal{N}} \sum_{j \in \mathcal{N}} c_{i j} x_{i j k} \\ \text {subject to} \quad &\sum_{i \in \mathcal{C}} d_{i} \sum_{j \in \mathcal{N}} x_{i j k} \leqslant Q, \quad \forall k \in \mathcal{V}, \\ &\sum_{k \in \mathcal{V}} \sum_{j \in \mathcal{N}} x_{i j k}=1, \quad \forall i \in \mathcal{C} \\ &\sum_{j \in \mathcal{N}} x_{0 j k}=1, \quad \forall k \in \mathcal{V}, \\ &\sum_{i \in \mathcal{N}} x_{i h k}-\sum_{j \in \mathcal{N}} x_{h j k}=0 , \quad \forall h \in \mathcal{C}, \forall k \in \mathcal{V}, \\ &\sum_{i \in \mathcal{N}} x_{i, n+1, k}=1 \quad \forall k \in \mathcal{V}, \\ &s_{i k}+t_{i j}-M_{i j}\left(1-x_{i j k}\right) \leqslant s_{j k}, \quad \forall i, j \in \mathcal{N}, \forall k \in \mathcal{V}, \\ &a_{i} \leqslant s_{i k} \leqslant b_{i} , \quad \forall i \in \mathcal{N}, \forall k \in \mathcal{V} \text {, } \\ &x_{i j k} \in\{0,1\}, \quad \forall i, j \in \mathcal{N}, \forall k \in \mathcal{V} \\ &s_{i k} \geq 0, \quad \forall i \in \mathcal{N}, \forall k \in \mathcal{V} \\ \end{align} minsubject tok∈V∑i∈N∑j∈N∑cijxijki∈C∑dij∈N∑xijk⩽Q,∀k∈V,k∈V∑j∈N∑xijk=1,∀i∈Cj∈N∑x0jk=1,∀k∈V,i∈N∑xihk−j∈N∑xhjk=0,∀h∈C,∀k∈V,i∈N∑xi,n+1,k=1∀k∈V,sik+tij−Mij(1−xijk)⩽sjk,∀i,j∈N,∀k∈V,ai⩽sik⩽bi,∀i∈N,∀k∈V, xijk∈{0,1},∀i,j∈N,∀k∈Vsik≥0,∀i∈N,∀k∈V
下面是各个约束的具体含义:
- 目标函数(1)最小化总体行驶距离;
- 约束(2)说明车辆的载重量不能超过其容量上限;
- 约束(3)保证了每个客户点都被访问了一次;
- 约束(4-6)分别保证了每辆车必须从始发站出发,到达并离开每个客户点,并最终回到终点站;
- 约束(7)规定了车辆开始服务点的时刻,不能早于开始服务点的时刻,加上从点到 - 点的行驶时间以及服务点的时间之和,其中的取值下界为;
- 约束(8)使得开始服务点的时刻是在规定的时间窗范围内;
- 约束(9-10)是对于决策变量的约束。
VRPTW问题求解
- 考虑随机性的车辆路径规划问题详解(Stochastic VRP) 数据魔术师
- 使用Java调用Cplex求解带时间窗的车辆路径问题
五、取送货问题数学模型(Homogeneous Multi vehicle pickup and delivery problem formulations)
参数
- n n n:取货点数量。
- n ~ \tilde{n} n~:送货点数量,因为这里是Paired PDP问题,故 n = n ~ n=\tilde{n} n=n~。
- P P P:取货点集合, P = { 1 , . . . , n } P = \{1,..., n\} P={1,...,n}
- D D D:送货点集合, D = { n + 1 , . . . , n + n ~ } D = \{n +1,..., n +\tilde{n}\} D={n+1,...,n+n~}
- K K K:车辆集合
- q i q_i qi:客户点 i i i的需求量(供应量),如果是取货点,则 q i > 0 q_i>0 qi>0;如果是送货点,则 q i < 0 q_i<0 qi<0;如果是起点0、终点,则 n + n ~ + 1 n +\tilde{n}+1 n+n~+1,则 q 0 = q n + n ~ + 1 = 0 q_0=q_{n +\tilde{n}+1}=0 q0=qn+n~+1=0。
- e i e_i ei:客户点 i i i允许的最早开始服务时间。
- l i l_i li:客户点 i i i允许的最晚开始服务时间。
- d i d_i di:客户点 i i i的服务时间(作业时间)。
- L i L_i Li:客户点 i i i的服务时间(作业时间)。
- C k C^k Ck:车辆 k k k的容量。
- T k T^k Tk:车辆 k k k作业时间上限(maximum route duration of vehicle/route k)
决策变量 - x i j k x_{ijk} xijk:车辆路径决策变量, x i j k = 1 x_{ijk}=1 xijk=1,车辆 k k k经过弧 ( i , j ) (i,j) (i,j);
- Q i k Q_{i}^{k} Qik:车辆 k k k离开节点 i i i时的装载量;
- B i k B_{i}^{k} Bik:车辆 k k k服务 i i i点的开始时刻;
混合整数规划模型
min ∑ k ∈ K ∑ ( i , j ) ∈ A c i j k x i j k subject to. ∑ k ∈ K ∑ j : ( i , j ) ∈ A x i j k = 1 ∀ i ∈ P ∪ D , ∑ j : ( 0 , j ) ∈ A x 0 j k = 1 ∀ k ∈ K , ∑ i : ( i , n + n ~ + 1 ) ∈ A x i , n + n ~ + 1 k = 1 ∀ k ∈ K , ∑ i : ( i , j ) ∈ A x i j k − ∑ i : ( j , i ) ∈ A x j i k = 0 ∀ j ∈ P ∪ D , k ∈ K , x i j k = 1 ⇒ B j k ≥ B i k + d i + t i j k ∀ ( i , j ) ∈ A , k ∈ K , x i j k = 1 ⇒ Q j k = Q i k + q j ∀ ( i , j ) ∈ A , k ∈ K , max { 0 , q i } ≤ Q i k ≤ min { C k , C k + q i } ∀ i ∈ V , k ∈ K , ∑ j : ( i , j ) ∈ A x i j k − ∑ j : ( n + i , j ) ∈ A x n + i , j k = 0 ∀ i ∈ P , k ∈ K B i k ≤ B n + i k ∀ i ∈ P , k ∈ K . e i ≤ B i k ≤ l i ∀ i ∈ V , k ∈ K , e i ≤ B i k ≤ l i ∀ i ∈ V , k ∈ K , B n + n ~ + 1 k − B 0 k ≤ T k ∀ k ∈ K , x i j k ∈ { 0 , 1 } ∀ ( i , j ) ∈ A , k ∈ K \begin{align} \min \quad & \sum_{k\in K}\sum_{(i,j) \in A} c_{ij}^k x_{ij}^k \\ \text{subject to.} \quad &\sum_{k \in K} \sum_{j:(i, j) \in A} x_{i j}^{k} =1 & \forall i \in P \cup D, \\ &\sum_{j:(0, j) \in A} x_{0 j}^{k}=1 & \forall k \in K, \\ &\sum_{i:(i, n+\tilde{n}+1) \in A} x_{i, n+\tilde{n}+1}^{k} =1 & \forall k \in K, \\ &\sum_{i:(i, j) \in A} x_{i j}^{k}-\sum_{i:(j, i) \in A} x_{j i}^{k} =0 &\forall j \in P \cup D, k \in K, \\ &x_{i j}^{k}=1 \Rightarrow B_{j}^{k} \geq B_{i}^{k}+d_{i}+t_{i j}^{k} & \forall(i, j) \in A, k \in K, \\ &x_{i j}^{k}=1 \Rightarrow Q_{j}^{k} =Q_{i}^{k}+q_{j} & \forall(i, j) \in A, k \in K, \\ &\max \left\{0, q_{i}\right\} \leq Q_{i}^{k} \leq \min \left\{C^{k}, C^{k}+q_{i}\right\} & \forall i \in V, k \in K, \\ & \sum_{j:(i, j) \in A} x_{i j}^{k}-\sum_{j:(n+i, j) \in A} x_{n+i, j}^{k}=0 \quad \forall i \in P, k \in K\\ & B_{i}^{k} \leq B_{n+i}^{k} \quad \forall i \in P, k \in K . & e_i \leq B_i^k \leq l_i & \forall i \in V, k \in K,\\ & e_i \leq B_i^k \leq l_i & \forall i \in V, k \in K,\\ & B_{n+\tilde{n}+1}^k -B_{0}^k \leq T^k &\forall k \in K,\\ &x_{i j}^{k} \in\{0,1\} & \forall(i, j) \in A, k \in K \\ \end{align} minsubject to.k∈K∑(i,j)∈A∑cijkxijkk∈K∑j:(i,j)∈A∑xijk=1j:(0,j)∈A∑x0jk=1i:(i,n+n~+1)∈A∑xi,n+n~+1k=1i:(i,j)∈A∑xijk−i:(j,i)∈A∑xjik=0xijk=1⇒Bjk≥Bik+di+tijkxijk=1⇒Qjk=Qik+qjmax{0,qi}≤Qik≤min{Ck,Ck+qi}j:(i,j)∈A∑xijk−j:(n+i,j)∈A∑xn+i,jk=0∀i∈P,k∈KBik≤Bn+ik∀i∈P,k∈K.ei≤Bik≤liBn+n~+1k−B0k≤Tkxijk∈{0,1}∀i∈P∪D,∀k∈K,∀k∈K,∀j∈P∪D,k∈K,∀(i,j)∈A,k∈K,∀(i,j)∈A,k∈K,∀i∈V,k∈K,ei≤Bik≤li∀i∈V,k∈K,∀k∈K,∀(i,j)∈A,k∈K∀i∈V,k∈K,
- 目标函数(1)最小化总体行驶成本;
- 约束(2)保证了每个客户点都被访问了一次;
- 约束(3-5)分别保证了每辆车必须从始发站出发,到达并离开每个客户点,并最终回到终点站;
- 约束(6)消除子回路,
- 约束(7-8)车辆容量约束
- 约束(9),联结约束(coupling constraint),同一需求的起点和终点都必须是同一辆车提供服务
- 约束(10),优先级约束(precedence constraint),针对每一货运需求,取货任 务的服务顺序须于送货任务前。
- 约束(11)时间窗约束
- 约束(12)路径时长限制
【注】约束(6)和(7)是非线性的,可以用大M进行线性化
PDPTW问题求解
使用Java调用Cplex求解带时间窗的车辆路径问题






![[算法] 牛课题霸 - DP6 连续子数组最大和 - 动态规划](https://img-blog.csdnimg.cn/direct/8e9ab3da35814a60ac561a99b292c2de.png)
