OpenCV涉及的常用数据类型除包含C++的基本数据类型,如:char、uchar,int、unsigned int,short 、long、float、double等数据类型外, 还包含Vec,Point、Scalar、Size、Rect、RotatedRect、Mat等类。C++中的基本数据类型不需再做说明下面重点介绍一下OpenCV中特有的与数据或数据处理相关的常用类。
Vec类
Vec类是表示固定长度向量的模板类。它与vector相似,如初始化,元素访问等,与vector不同的是: 因Vec试固定长度向量模板类,在声明实例化时对象时,除指定类型外,还得指定长度,在声明vector实例化对象时,除需指定类型外,长度则不是必需的。另外,Vec对象除可以赋值运算符外,Vec对象还可以直接参与“算术运算”,而vector对象虽然可以使用赋值运算符,但不能直接参与“算术运算”。
OpenCV中已经预定义了多个可以直接使用的Vec类型别名,如下:
typedef Vec< uchar, 2 > cv::Vec2b
typedef Vec< uchar, 3 > cv::Vec3b
typedef Vec< uchar, 4 > cv::Vec4b
typedef Vec< short, 2 > cv::Vec2s
typedef Vec< short, 3 > cv::Vec3s
typedef Vec< short, 4> cv::Vec4s
typedef Vec< ushort, 2 > cv::Vec2w
typedef Vec< ushort, 3> cv::Vec3w
typedef Vec< ushort, 24> cv::Vec4w
typedef Vec< int, 2 > cv::Vec2i
typedef Vec< int, 3 > cv::Vec3i
typedef Vec< int, 4 > cv::Vec4i
typedef Vec< int, 6 > cv::Vec6i
typedef Vec< int, 8> cv::Vec8i
typedef Vec< float, 2 > cv::Vec2f
typedef Vec< float, 3 > cv::Vec3f
typedef Vec< float, 4> cv::Vec4f
typedef Vec< float, 6 > cv::Vec6f
typedef Vec< double, 2 > cv::Vec2d
typedef Vec< double, 3> cv::Vec3d
typedef Vec< double, 4 > cv::Vec4d
typedef Vec< double, 6 > cv::Vec6d
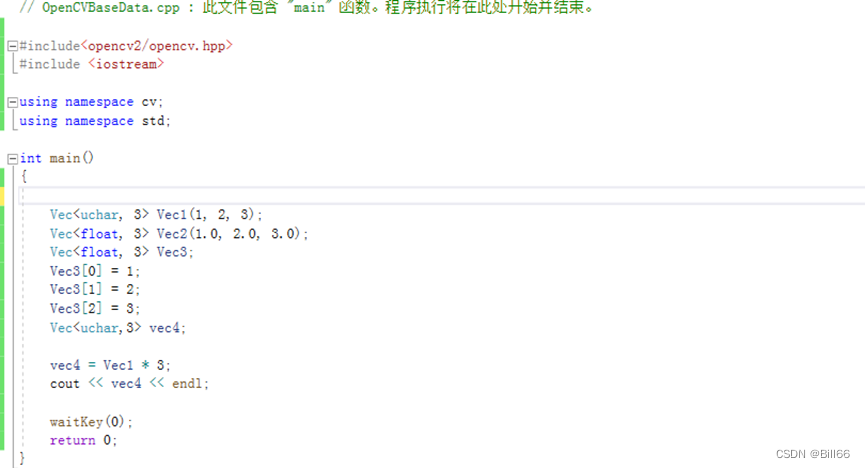
现在以实例演示一下Vector与Vec用法上的区别。下面程序,编译是不会出错的。

如果修改一下,加入算术运算代码, 如下:

可以看出·还没有编译,就·有·错误·提示·,说明vector对象·是不可以与常数相乘的。
Vec类型对象可以与标量进行乘除,下面的程序则可以通过编译,不会报错:
该程序试运行,结果如下:
需注意的是,Vec对象的算术运算并非真正数学上的算术运算,只是重载了算术运算符。Vec实例化对象可以被标量乘或除,结果是Vec对象的每一个元素都被标量乘或除。Vec对象可以做乘数、被乘数、被除数,但不可做除数。下面是一个Vec与标量乘、除的示例程序代码:

试运行,结果如下:
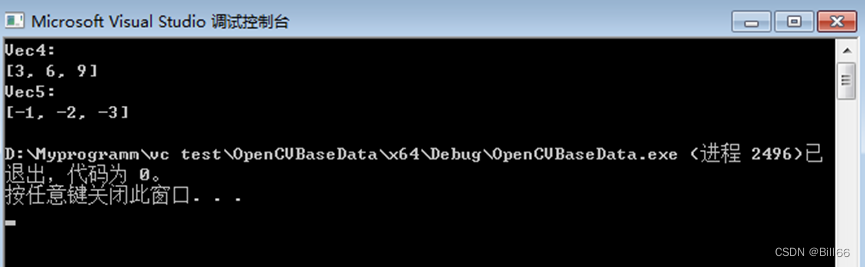
Vec对象间可以做“+”、“-”运算,运算的Vec对象的类型及长度须相同。下面是一个Vec对象“+”、“-”运算的示例程序:
试运行,结果如下:
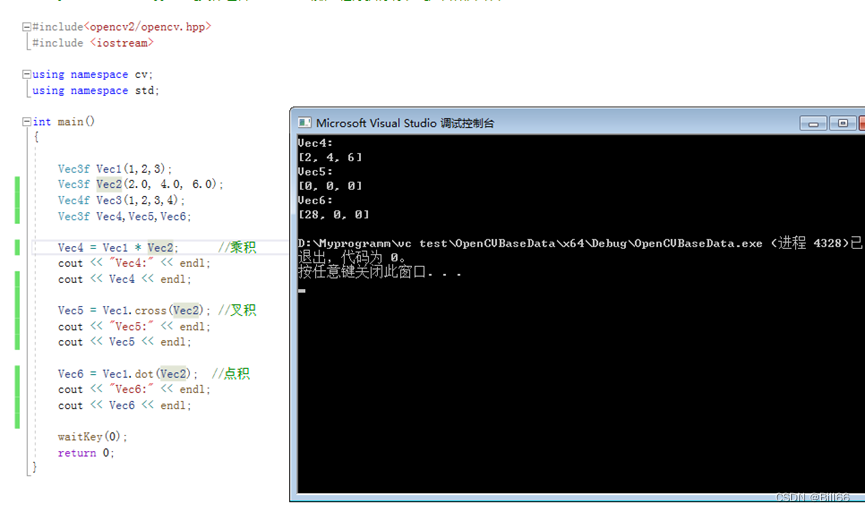
Vec对象的乘积 Vec对象可以相乘,存在乘积、点积与叉积之分。Vec对象要进行乘运算也需类型与长度相同,不符合乘法交换律。下面是一个Vec对象相乘、点积、差积的示例程序:

试运行,结果如下:
Point(点)类
Ponit类也是一个模版类.
template<typename _Tp>
class cv::Point_< _Tp >
Template class for 2D points specified by its coordinates x and y.
template<typename _Tp>
class cv::Point3_< _Tp >
Template class for 3D points specified by its coordinates x, y and z.。
Point类与MFC中的CPoint类似,OpenCV的Point类可以看作是存放2个或3个int或float值的容器,Point包含的值即点的坐标。点有二维点与三位点,OpenCV中按数据Point类型不同及维度不同预定义了:Point、Point2d、Point2i,Point2f、Pointe3d、Point3i、Point3f。
typedef Point_<int> cv::Point2i
typedef Point_<float> cv::Point2f
typedef Point_<double> cv::Point2d
typedef Point2i cv::Point
typedef Point3_<double> cv::Point3d
typedef Point3_<float> cv::Point3f
typedef Point3_<int> cv::Point3i
Point对象可以先声明再赋值,也可用构造函数构造Point对象并初始化。Point 也可被标量乘除、Point对象间也可加减、Point对象间也可求叉积、点积。下面以实例演示Point对象声明、初始化、及其它运算。下面是演示程序的代码:
// OpenCVBaseData.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。#include<opencv2/opencv.hpp>
#include <iostream>using namespace cv;
using namespace std;int main()
{Point p1;p1.x = 100;p1.y = 100;Point p2(200, 100);Point2d p2d1(100,127);Point2d p2d2(10, 123);Point2i p2i1(500, 350);Point2i p2i2(00, 310);Point2f p2f1(13.5, 24.7);Point2f p2f2(350.0, 270.3);Point3d p3d1(15, 25, 35);Point3d p3d2(55, 85, 0);Point3i p3i1(351, 227, 158);Point3i p3i2(11, 127, 18);Point3f p3f1(153.5, 163.1, 191.9);Point3f p3f2(1003, 2465, 381);Point p3,p4;Point2d p2d3, p2d4;Point2i p2i3, p2i4;Point2f p2f3, p2f4;Point3d p3d3, p3d4;Point3i p3i3, p3i4;Point3f p3f3, p3f4;p3 = p1 + p2;cout << "p3:" << endl;cout << p3 << endl;p4 = p1 * 2;cout << "p4:" << endl;cout << p4 << endl;cout << p1.dot(p2) << endl;cout << p4.cross(p1) << endl;cout << p4.ddot(p2) << endl;p2d3 = p2d1 / 2;p2d4 = p2d1 - p2d2;cout << "p2d3:" << endl;cout << p2d3 << endl;cout << "p2d4:" << endl;cout << p2d4 << endl;cout << p2d4.ddot(p2d1) << endl;cout << p2d4.dot(p2d1) << endl;cout << p2d4.cross(p2d1) << endl;p2i3 = p2i1 / 2;p2i4 = p2i1 - p2i2;cout << "p2i3:" << endl;cout << p2i3 << endl;cout << "p2i4:" << endl;cout << p2i4 << endl;cout << p2i4.ddot(p2i1) << endl;cout << p2i4.dot(p2i1) << endl;cout << p2i4.cross(p2i1) << endl;p2f3 = p2i1 / 2;p2f4 = p2i1 - p2i2;cout << "p2f3:" << endl;cout << p2f3 << endl;cout << "p2f4:" << endl;cout << p2f4 << endl;cout << p2f4.ddot(p2f1) << endl;cout << p2f4.dot(p2f1) << endl;cout << p2f4.cross(p2f1) << endl;p3d3 = p3d1 / 2;p3d4 = p3d1 - p3d2;cout << "p3d3:" << endl;cout << p3d3 << endl;cout << "p3d4:" << endl;cout << p3d4 << endl;cout << p3d4.ddot(p3d1) << endl;cout << p3d4.dot(p3d1) << endl;cout << p3d4.cross(p3d1) << endl;p3i3 = p3i1 / 2;p3i4 = p3i1 - p3i2;cout << "p3i3:" << endl;cout << p3i3 << endl;cout << "p3i4:" << endl;cout << p3i4 << endl;cout << p3i4.ddot(p3i1) << endl;cout << p3i4.dot(p3i1) << endl;cout << p3i4.cross(p3i1) << endl;p3f3 = p3i1 / 2;p3f4 = p3i1 - p3i2;cout << "p3f3:" << endl;cout << p3f3 << endl;cout << "p3f4:" << endl;cout << p3f4 << endl;cout << p3f4.ddot(p3f1) << endl;cout << p3f4.dot(p3f1) << endl;cout << p3f4.cross(p3f1) << endl;waitKey(0);return 0;
}
试运行,结果如下:
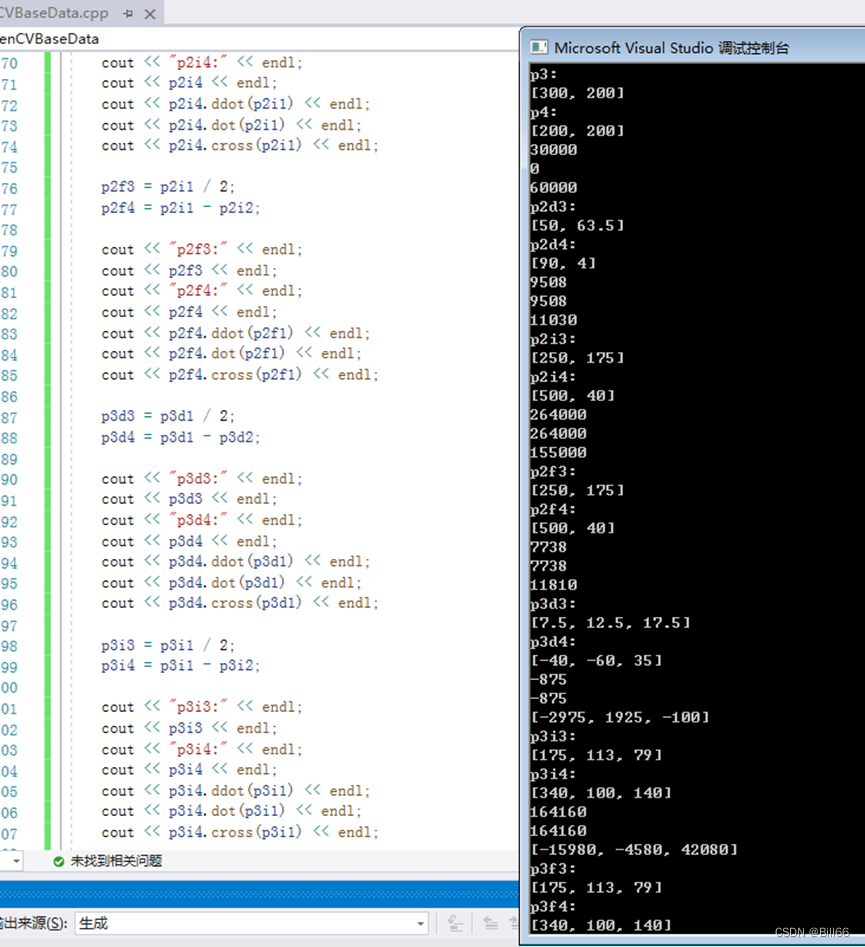 OpenCV的点对象加、减运算需是相同类型及相同维度,而叉积与点积运算,则需是相同维度的Point才能进行。
OpenCV的点对象加、减运算需是相同类型及相同维度,而叉积与点积运算,则需是相同维度的Point才能进行。
Scalar(标量)类
Scalar类(标量类)实际上是一个四维双精度向量类。Scalar的公有成员函数如下:
Scalar ()=default
Scalar (double v0)
Scalar (double v0, double v1, double v2=0, double v3=0)
const double & operator[] (int i) const
double & operator[] (int i)
前三个为构造函数,后面两个为[]操作符重载函数。
Scalar有一个静态工有成员函数,如下:
static Scalar all (double v0)
Scalar有一个公有属性,如下:
double val [4] = {0}
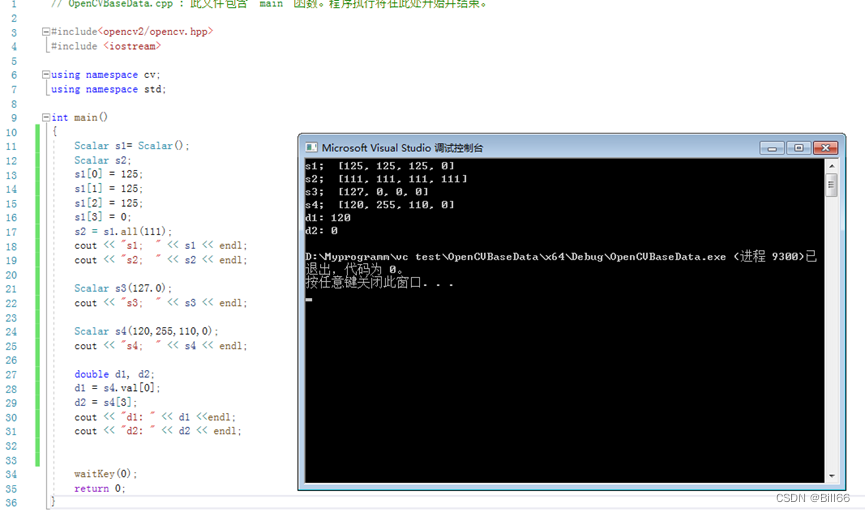
下面以实例演示Scalar对象创建,及公有属性的访问等。示例程序的代码如下:
// OpenCVBaseData.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。#include<opencv2/opencv.hpp>
#include <iostream>using namespace cv;
using namespace std;int main()
{Scalar s1= Scalar();Scalar s2;s1[0] = 125;s1[1] = 125;s1[2] = 125;s1[3] = 0;s2 = s1.all(111);cout << "s1; " << s1 << endl;cout << "s2; " << s2 << endl;Scalar s3(127.0);cout << "s3; " << s3 << endl;Scalar s4(120,255,110,0);cout << "s4; " << s4 << endl;double d1, d2;d1 = s4.val[0];d2 = s4[3];cout << "d1: " << d1 <<endl;cout << "d2: " << d2 << endl;waitKey(0);return 0;
}
试运行,结果如下:
Size(尺寸)类
Size类比较简单,它有两个公有属性变量width、height。Size类重载了赋值操作符“=”。Size类的构造函数如下:
Size ()=default
Size (int _width, int _height)
Size (const cv::Size &other)
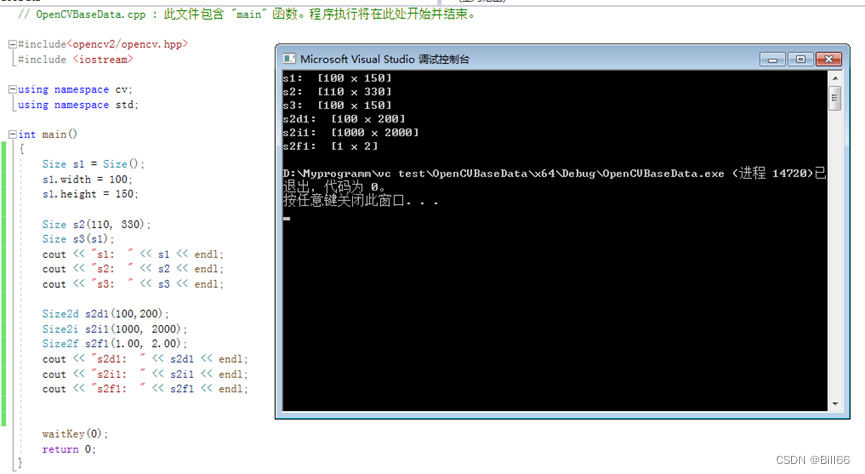
Size因数据类型不同又可细分为:Size2d,Size2i,Size2f。下面以实例演示Size对象声明及初始化等操作。实例程序代码如下:
// OpenCVBaseData.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。#include<opencv2/opencv.hpp>
#include <iostream>using namespace cv;
using namespace std;int main()
{Size s1 = Size();s1.width = 100;s1.height = 150;Size s2(110, 330);Size s3(s1);cout << "s1: " << s1 << endl;cout << "s2: " << s2 << endl;cout << "s3: " << s3 << endl;Size2d s2d1(100,200);Size2i s2i1(1000, 2000);Size2f s2f1(1.00, 2.00);cout << "s2d1: " << s2d1 << endl;cout << "s2i1: " << s2i1 << endl;cout << "s2f1: " << s2f1 << endl;waitKey(0);return 0;
}
试运行,结果如下:
Rect(矩形)类
Rect类中以矩形的左上角坐标及矩形宽度与高度来定义一个矩形。Rect类共有4个公有属性变量:int x,int y,int _width, int _height。Rect类重载了赋值操作符“=”。Rect类的构造函数如下:
Rect ()=default
Rect (int _x, int _y, int _width, int _height)
Rect (const cv::Rect &other)
因数据类型不同,同样也有Rect2d,Rect2i,Rect2f。
可是用Point类的inside函数判定一个点是否在矩形内。下面以实例演示,Rect类对象声明、初始化等。示例程序的代码如下:
// OpenCVBaseData.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。#include<opencv2/opencv.hpp>
#include <iostream>using namespace cv;
using namespace std;int main()
{Rect rec1(0, 0, 100, 100);Rect rec2(rec1);Rect rec3 = rec2;cout << "rec1: " << endl;cout << "x: " << rec1.x << " " << "y: " << rec1.y << " " << "width: " << rec1.width << " " << "height: " << rec1.height << endl;cout << "rec2: " << endl;cout << "x: " << rec2.x << " " << "y: " << rec2.y << " " << "width: " << rec2.width << " " << "height: " << rec2.height << endl;Rect2d rec2d1(0, 0, 233, 233);Rect2i rec2i1(0, 0, 500, 500);Rect2f rec2f1(0, 0, 235.1, 500.0);Point p1(50, 250);if (p1.inside(rec2d1))cout << "p1 is inisde of rec2d1 " << endl;elsecout << "p1 is not inisde of rec2d1 "<< endl;if (p1.inside(rec2i1))cout << "p1 is inisde of rec2i1 " << endl;elsecout << "p1 is not inisde of rec2i1 " << endl;if (p1.inside(rec2f1))cout << "p1 is inisde of rec2f1 " << endl;elsecout << "p1 is not inisde of rec2f1 " << endl;waitKey(0);return 0;
}
试运行,结果如下:

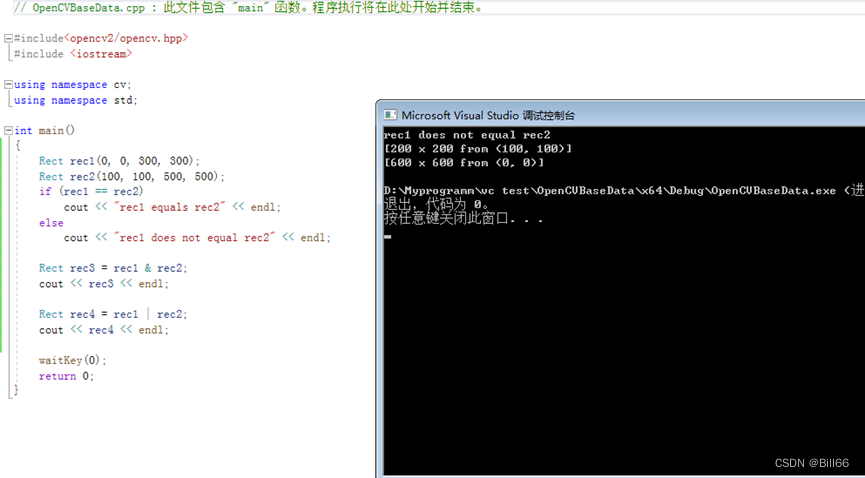
Rect对象可以进行“==”判定,“|”运算、“&”运算。下面以实例做演示,演示代码如下:
// OpenCVBaseData.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。#include<opencv2/opencv.hpp>
#include <iostream>using namespace cv;
using namespace std;int main()
{Rect rec1(0, 0, 300, 300);Rect rec2(100, 100, 500, 500);if (rec1 == rec2)cout << "rec1 equals rec2" << endl;elsecout << "rec1 does not equal rec2" << endl;Rect rec3 = rec1 & rec2;cout << rec3 << endl;Rect rec4 = rec1 | rec2;cout << rec4 << endl;waitKey(0);return 0;
}
试运行,结果如下:
RotatedRect(旋转矩形)类
RotatedRect类与Rect类的不同点是,Rect类所表示的矩形是水平放置的,而RotatedRect类所表示的矩形则是以任意角度放置的,相当于在Rect表示的矩形基础上再旋转一个角度。
RotatedRect类的公有成员函数有一下几个:
RotatedRect ()
RotatedRect (const Point2f ¢er, const Size2f &size, float angle)
参数:center 矩形的质心,size 矩形的长宽尺寸,angle 旋转角度(顺时针方向旋转)
RotatedRect (const Point2f &point1, const Point2f &point2, const Point2f &point3)
参数: point1 矩形的第一个点,point2 矩形的第二个点,point3 矩形的第三个点,
Rect boundingRect () const
返回包含旋转矩形对象所表示旋转矩形的最小矩形,数据类型为int
Rect<float> boundingRect2f () const
返回包含旋转矩形对象所表示旋转矩形的最小矩形,数据类型为float
void points (Point2f pts[]) const
用旋转矩形对象所表示矩形的角点填充Point2f 点数组
void points (std::vector< Point2f > &pts) const
用旋转矩形对象所表示矩形的角点填充Point2f 点数组
RotatedRect类的公有属性成员变量有一下几个:
float angle 旋转角度,以度表示
Pointe2f center 矩形的质心
Size2f size 代表矩形长宽的尺寸
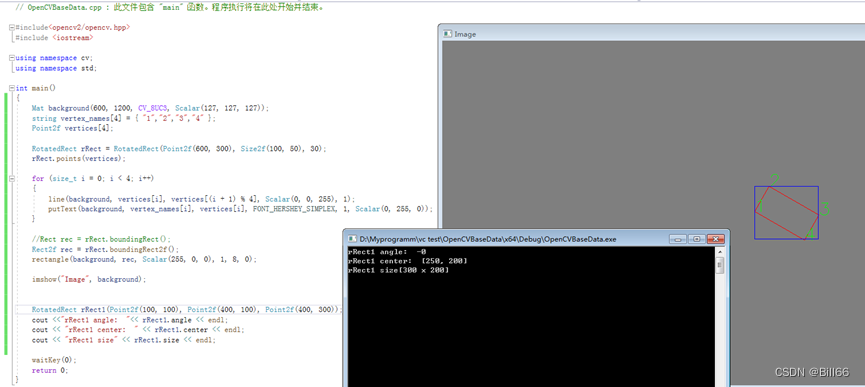
下面以实例演示RotatedRect对象构造及其它成员函数的用法。示例代码如下:
#include<opencv2/opencv.hpp>
#include <iostream>using namespace cv;
using namespace std;int main()
{Mat background(600, 1200, CV_8UC3, Scalar(127, 127, 127));string vertex_names[4] = { "1","2","3","4" };Point2f vertices[4];RotatedRect rRect = RotatedRect(Point2f(600, 300), Size2f(100, 50), 30);rRect.points(vertices);for (size_t i = 0; i < 4; i++){line(background, vertices[i], vertices[(i + 1) % 4], Scalar(0, 0, 255), 1);putText(background, vertex_names[i], vertices[i], FONT_HERSHEY_SIMPLEX, 1, Scalar(0, 255, 0));}//Rect rec = rRect.boundingRect();Rect2f rec = rRect.boundingRect2f();rectangle(background, rec, Scalar(255, 0, 0), 1, 8, 0);imshow("Image", background);RotatedRect rRect1(Point2f(100, 100), Point2f(400, 100), Point2f(400, 300));cout <<"rRect1 angle: "<< rRect1.angle << endl;cout << "rRect1 center: " << rRect1.center << endl;cout << "rRect1 size" << rRect1.size << endl;waitKey(0);return 0;
}
试运行,结果如下:
Mat 类
Mat类在前面的文章中已经详细介绍这里不再做说明。这里介绍一下Mat对象矩阵数据的位操作及矩阵运算。假如一个Mat对象存储了一副RGB图像,如何获取或改变图像中某一像素的值呢?要做到这一点可以用以下几种
1. 使用Mat类的成员函数at。
2,使用Mat内部数据指针ptr。
3. 使用Mat的数据矩阵的数据指针data。
4. 使用迭代器
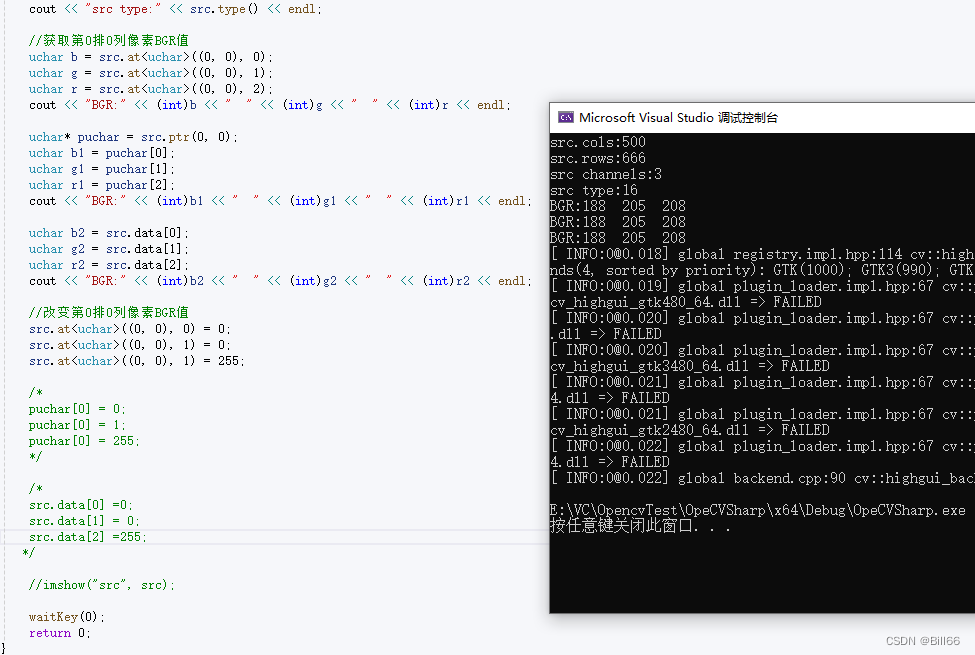
下面用一个实例来演示以上几种Mat数据位操作方法。示例代码如下:
// OpeCVSharp.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。#include <iostream>
#include <opencv2/opencv.hpp>using namespace cv;
using namespace std;int main()
{Mat src = imread("1.jpg");if (src.empty()){cout << "Cann't load image!" << endl;return -1;}cout <<"src.cols:" << src.cols << endl;cout << "src.rows:" << src.rows << endl;cout << "src channels:" << src.channels() << endl;cout << "src type:" << src.type() << endl;//获取第0排0列像素BGR值uchar b = src.at<uchar>((0, 0), 0);uchar g = src.at<uchar>((0, 0), 1);uchar r = src.at<uchar>((0, 0), 2);cout << "BGR:" << (int)b << " " << (int)g << " " << (int)r << endl;uchar* puchar = src.ptr(0, 0);uchar b1 = puchar[0];uchar g1 = puchar[1];uchar r1 = puchar[2];cout << "BGR:" << (int)b1 << " " << (int)g1 << " " << (int)r1 << endl;uchar b2 = src.data[0];uchar g2 = src.data[1];uchar r2 = src.data[2];cout << "BGR:" << (int)b2 << " " << (int)g2 << " " << (int)r2 << endl;//改变第0排0列像素BGR值src.at<uchar>((0, 0), 0) = 0;src.at<uchar>((0, 0), 1) = 0;src.at<uchar>((0, 0), 1) = 255;/*puchar[0] = 0;puchar[0] = 1;puchar[0] = 255;*//*src.data[0] =0;src.data[1] = 0;src.data[2] =255;*///imshow("src", src);waitKey(0);return 0;
}试运行,结果如下:
Mat对象实质上是数据矩阵,当然可以进行矩阵运算。这里不做全面介绍,仅介绍两个有趣的运算,与常数相乘及与常数向加。
先用实例演示与常数相乘,示例代码如下:
// OpeCVSharp.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。#include <iostream>
#include <opencv2/opencv.hpp>using namespace cv;
using namespace std;int main()
{Mat src = imread("1.jpg");if (src.empty()){cout << "Cann't load image!" << endl;return -1;}cout <<"src.cols:" << src.cols << endl;cout << "src.rows:" << src.rows << endl;cout << "src channels:" << src.channels() << endl;cout << "src type:" << src.type() << endl;imshow("src", src);src *= 1.5;imshow("src new", src);src *= 0.5;imshow("src new1", src);waitKey(0);return 0;
}试运行,结果如下:
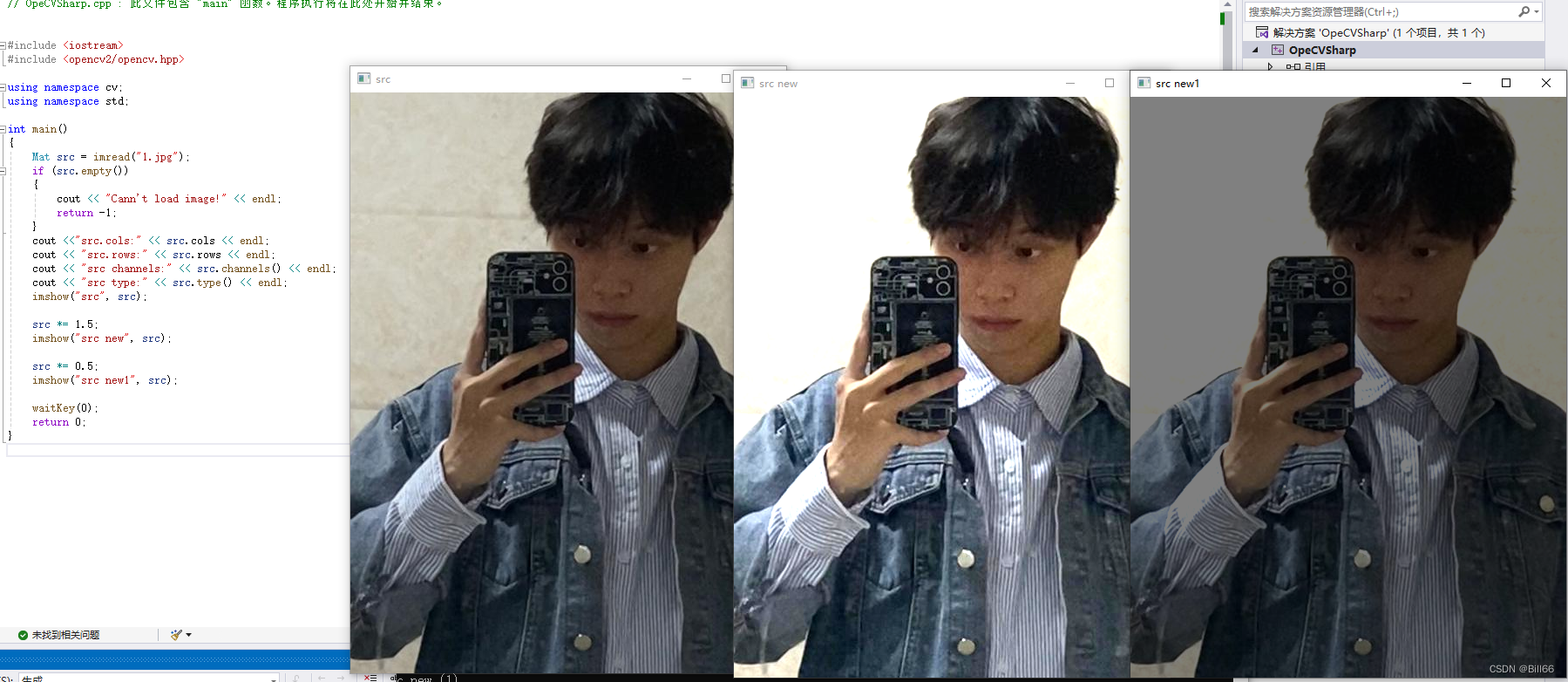 可以看出存有图像的Mat对象乘以一个大于1的常数将使图像变亮,乘以一个小于1的常数使图像变暗。不难想象,该Mat对象除以一个常数将会发生什么现象。
可以看出存有图像的Mat对象乘以一个大于1的常数将使图像变亮,乘以一个小于1的常数使图像变暗。不难想象,该Mat对象除以一个常数将会发生什么现象。
再演示一下Mat对象加、减以一个常数,示例代码如下:
// OpeCVSharp.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。#include <iostream>
#include <opencv2/opencv.hpp>using namespace cv;
using namespace std;int main()
{Mat src = imread("1.jpg");if (src.empty()){cout << "Cann't load image!" << endl;return -1;}cout <<"src.cols:" << src.cols << endl;cout << "src.rows:" << src.rows << endl;cout << "src channels:" << src.channels() << endl;cout << "src type:" << src.type() << endl;imshow("src", src);src += 20;imshow("src new", src);src -= 40;imshow("src new1", src);waitKey(0);return 0;
}
试运行,结果如下:

可以看出,加一个常数使图像变得更蓝,减以一个常数使图像变黄,说明加、减都作用在像素的B通道上。 上面是用彩色图做演示,如果把彩色图转换成灰度图结果又会如何呢?再用实例演示一下,下面是演示的示例代码:
// OpeCVSharp.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。#include <iostream>
#include <opencv2/opencv.hpp>using namespace cv;
using namespace std;int main()
{Mat src = imread("1.jpg");if (src.empty()){cout << "Cann't load image!" << endl;return -1;}cout <<"src.cols:" << src.cols << endl;cout << "src.rows:" << src.rows << endl;cout << "src channels:" << src.channels() << endl;cout << "src type:" << src.type() << endl;// imshow("src", src);cvtColor(src, src, COLOR_BGR2GRAY);imshow("src", src);src += 60;imshow("src new", src);src -= 80;imshow("src new1", src);waitKey(0);return 0;
}试运行,结果如下:
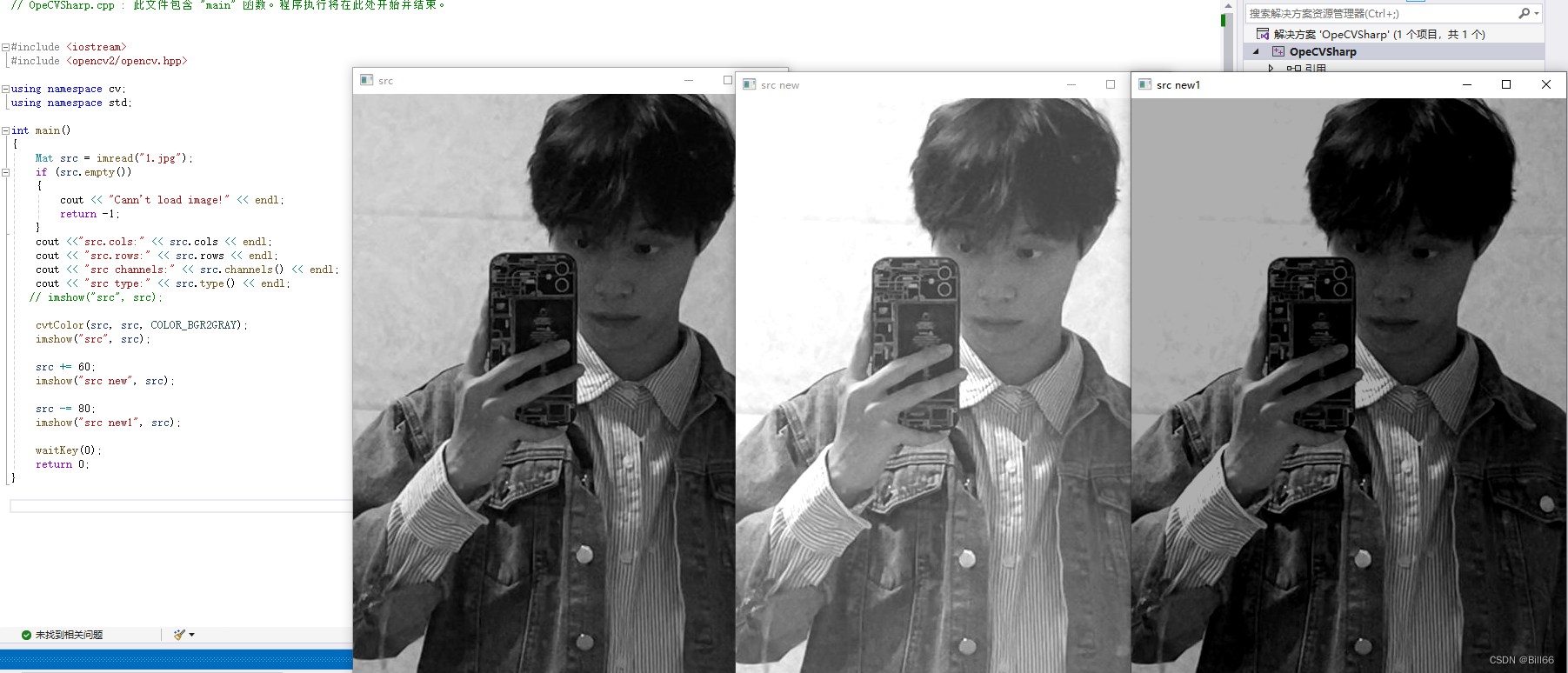
可以看出,对含灰度图的Mat对象加一个 正数,图像会变量,减一个正数图像会变暗。
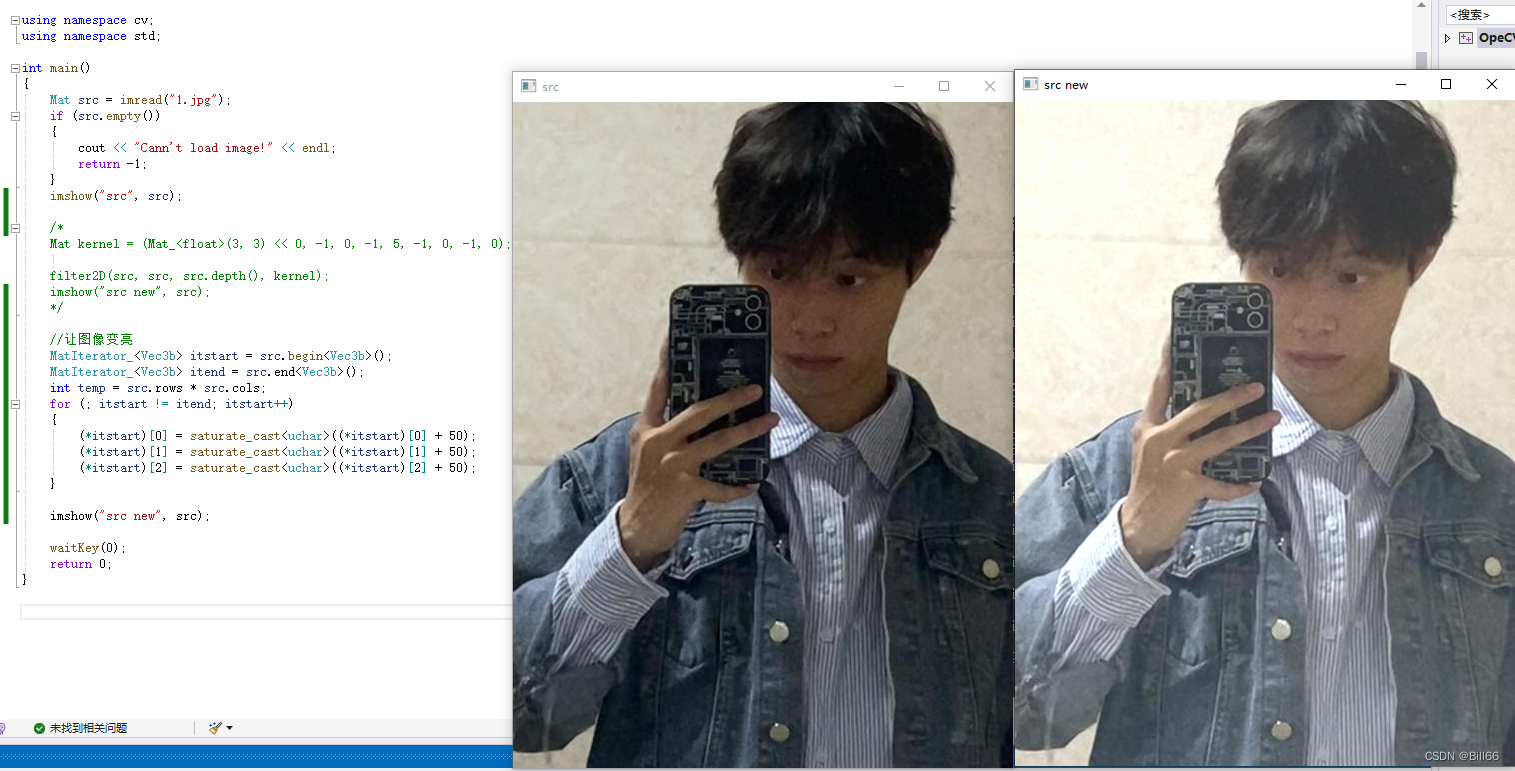
下面再演示一下使用迭代器是图像变亮,示例代码如下:
// OpeCVSharp.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。#include <iostream>
#include <opencv2/opencv.hpp>using namespace cv;
using namespace std;int main()
{Mat src = imread("1.jpg");if (src.empty()){cout << "Cann't load image!" << endl;return -1;}imshow("src", src);/*Mat kernel = (Mat_<float>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);filter2D(src, src, src.depth(), kernel);imshow("src new", src);*///让图像变亮MatIterator_<Vec3b> itstart = src.begin<Vec3b>();MatIterator_<Vec3b> itend = src.end<Vec3b>();int temp = src.rows * src.cols;for (; itstart != itend; itstart++){(*itstart)[0] = saturate_cast<uchar>((*itstart)[0] + 50);(*itstart)[1] = saturate_cast<uchar>((*itstart)[1] + 50);(*itstart)[2] = saturate_cast<uchar>((*itstart)[2] + 50);}imshow("src new", src);waitKey(0);return 0;
}试运行结果如下:
本文到此结束,示例是基于OpenCV4.8(opencv目录位于d盘根目录下)及VS2022。