摘要:本文提出了一种利用苦鱼优化算法(Bitterling fish optimization,BFO)来解决城市环境下无人机三维路径规划问题的方法。这种方法将复杂的无人机航迹规划任务转化为一个优化问题,然后运用苦鱼优化算法BFO来解决这个优化问题。苦鱼优化算法(BFO) 灵感来自于鳑鮍鱼独特的繁殖机制。我们将BFO算法应用于城市复杂地形环境下的无人机三维航迹路径规划。通过对算法的性能进行仿真实验,我们发现该方法能够有效地规划出满足避障要求的无人机三维航迹,并且具有较高的规划效率。这意味着,我们的方法能够在城市复杂环境中,快速而准确地为无人机规划出一条既安全又高效的飞行路径,为无人机的实际应用提供了有力支持。
关键词:城市三维无人机路径规划;复杂地形三维航迹路径规划;苦鱼优化算法BFO
1. 问题描述
无人机三维路径规划问题,简单来说,就是在三维空间中为无人机设计一条从起点到终点的飞行路线。这条路线不仅要能避开障碍物,还要保证飞行的效率。这个问题相当复杂,因为它涉及到很多限制条件,比如要避免撞到障碍物,还要保证飞行的速度和效率。所以,解决无人机三维路径规划问题需要综合考虑很多因素,才能找到一条既安全又高效的飞行路线。
2.本文提出了一种基于苦鱼优化算法BFO的无人机三维路径规划方法。该方法将无人机三维路径规划问题转化为一个优化问题,并利用苦鱼优化算法BFO对优化问题进行求解。
3. 仿真实验
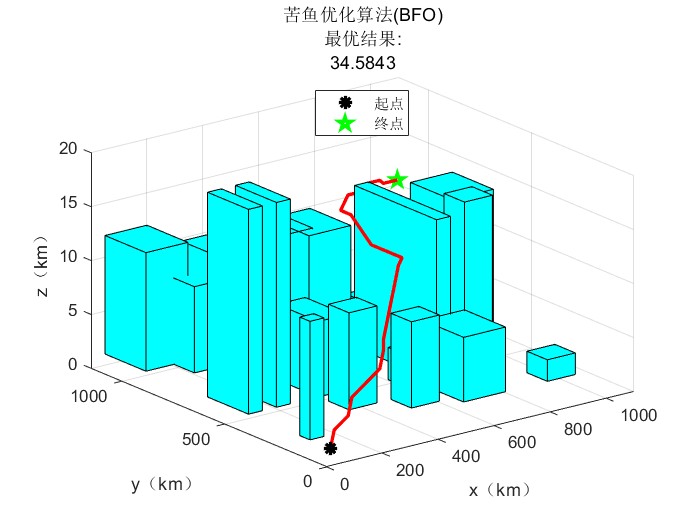
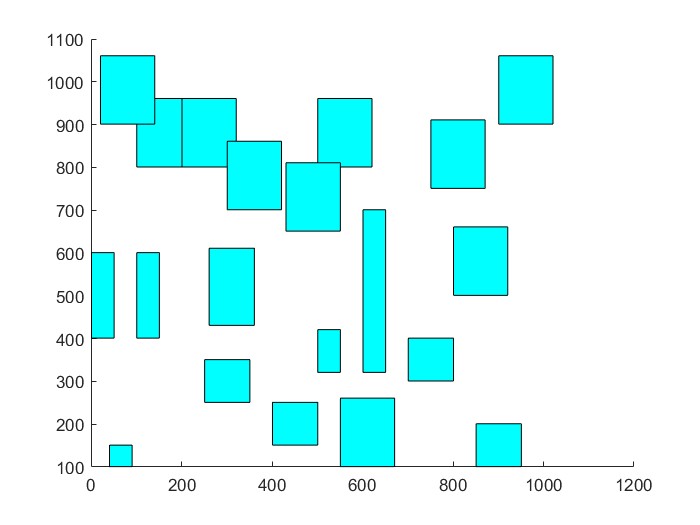
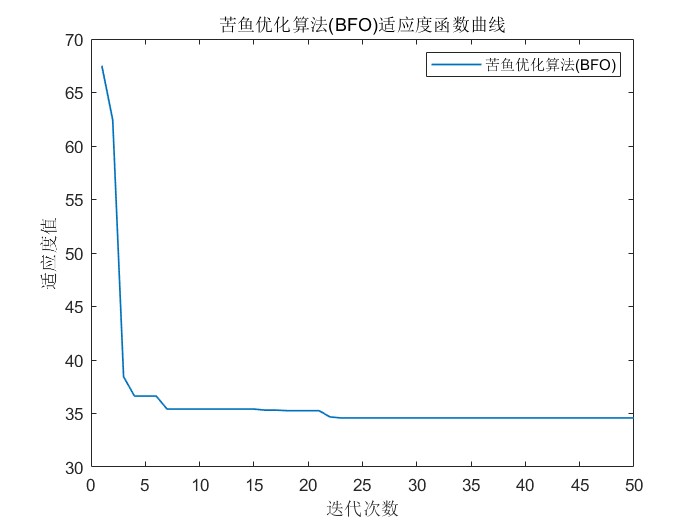
在本文中,我们对基于苦鱼优化算法BFO的无人机三维路径规划方法进行了仿真实验。实验中,无人机需要在三维空间中飞行,并成功避开所有障碍物。实验的结果表明,这种方法能够非常有效地规划出满足避障要求的无人机三维飞行路径,并且在规划效率方面表现优异。这意味着,我们的方法不仅能够确保无人机在飞行过程中的安全,还能在较短时间内找到最优的飞行路径,提高了无人机的整体飞行效率。
4. 结论
本文介绍了一种新的无人机三维路径规划方法,它基于苦鱼优化算法BFO进行优化。这种方法将复杂的无人机路径规划问题转化为了一个优化问题,然后利用苦鱼优化算法BFO来寻找最佳的飞行路径。通过模拟实验,我们发现这个方法非常有效,不仅可以避开障碍物,还能高效地完成飞行任务。这意味着,无人机可以在保证安全的同时,更加快速地完成飞行任务,提高了整体的工作效率。
实验结果如下:
主函数部分代码如下:
data.S=[1,1,1]; %起点位置
data.E=[950,950,13]; %终点点位置
data.Obstacle=...[40 100 0 50 50 11400 150 0 100 100 8550 100 0 120 160 6850 100 0 100 100 20 400 0 50 200 19100 400 0 50 200 19260 430 0 100 180 7500 320 0 50 100 3600 320 0 50 380 15700 300 0 100 100 16800 500 0 120 160 14300 700 0 120 160 12430 650 0 120 160 1220 900 0 120 160 11100 800 0 120 160 8200 800 0 120 160 10500 800 0 120 160 8750 750 0 120 160 2900 900 0 120 160 6250 250 0 100 100 9];
data.numObstacles=length(data.Obstacle(:,1));
data.mapSize=[1000,1000,20]; %10m 地图尺寸
data.unit=[50,50,1]; %地图精度
data.S0=ceil(data.S./data.unit);
data.E0=ceil(data.E./data.unit);
data.mapSize0=data.mapSize./data.unit;
data.map=zeros(data.mapSize0);
for i=1:data.numObstaclesx=1+data.Obstacle(i,1);y=1+data.Obstacle(i,2);z=1+data.Obstacle(i,3);long=data.Obstacle(i,4);wide=data.Obstacle(i,5);pretty=data.Obstacle(i,6);[V,F] = DrawCuboid(long, wide, pretty, x,y,z);x0=ceil(x/data.unit(1));y0=ceil(y/data.unit(2));z0=ceil(z/data.unit(3));long0=ceil(long/data.unit(1));wide0=ceil(wide/data.unit(2));pretty0=ceil(pretty/data.unit(3));data.map(x0:x0+long0,y0:y0+wide0,z0:z0+pretty0)=1;
end