0. 环境
- pzp203
- ubuntu18 + vivado2018
pzp203是一款plutosdr的国产兼容版。出厂默认是基于linux系统的,用libiio调用。软硬件兼容adalm-pluto。开发板提供网盘资料,是添加了板卡适配的。

1. hdl
1.1 准备源码
hdl
https://github.com/analogdevicesinc/hdl/releases
切换分支到2019_r1,通过Download as zip下载
hdl-2019_r1.tar.gz
放到工作区,
~/work/pzp203/ad9361os/
解压
tar -zvxf hdl-2019_r1.tar.gz1.2 生成 vivado 工程
设置vivado环境
source /tools/Xilinx/Vivado/2018.3/settings64.sh
开始编译
cd /home/xxjianvm/work/pzp203/ad9361os/hdl-2019_r1
make fmcomms2.zed
# 如果用基于pluto的HDL,META-ADI未支持pluto,无法顺利加载ad9361,这里还是用fmcomms2的hdl
得到了vivado工程。
1.3 适配
vivado 打开工程
source /tools/Xilinx/Vivado/2018.3/settings64.sh
vivado &
Open Project -> /home/xxjianvm/work/pzp203/ad9361os/hdl-2019_r1/projects/fmcomms2/zed/fmcomms2_zed.xpr
1.3.1 修改芯片型号
PROJECT MANAGER -> Settings -> Project Settings -> General -> Project device: xc7z020clg400-1 -> OK -> Apply -> NO -> OK更新IP
IP INTEGRATOR -> Open Block Design -> Report IP Status -> Upgrade Selected -> OK1.3.2 适配ddr
双击 sys_ps7 -> -> DDR Configuration -> DDR Controller Configuration -> Memory Type: DDR3 -> Memory Part: MT41K256M16 RE-125-> Effective DRAM Bus Width: 32 Bit
-> OK1.3.3 适配ETH0,SD0,UART0,USB0
双击 sys_ps7 -> -> Peripheral I/O Pins-> 点击位于 MIO12-MIO13 的 UART1-> 展开 SD0-> 取消勾选 Card Detect-> 取消勾选 Write Protect-> MIO Configuration-> Bank 0 I/O Voltage: LVCMOS 1.8V-> Bank 1 I/O Voltage: LVCMOS 1.8V-> 展开 I/O Peripherals-> 展开 GPIO-> 勾选 GPIO MIO-> 勾选 USB0 Reset-> 选择 MIO 48
-> OK1.3.4 适配 ad9361
双击 axi_ad9361
-> Cmos Or Lvds N: 1
-> OK
点击 rx_clk_in、rx_frame_in、rx_data_in[11:0]、tx_clk_in、tx_frame_in、tx_data_in[11:0] -> 右键 Make External -> 删除引出引脚中的_0
修改 system_wrapper.v
把
rx_clk_in_n,rx_clk_in_p,rx_data_in_n,rx_data_in_p,rx_frame_in_n,rx_frame_in_p,input rx_clk_in_n;input rx_clk_in_p;input [5:0]rx_data_in_n;input [5:0]rx_data_in_p;input rx_frame_in_n;input rx_frame_in_p;wire rx_clk_in_n;wire rx_clk_in_p;wire [5:0]rx_data_in_n;wire [5:0]rx_data_in_p;wire rx_frame_in_n;wire rx_frame_in_p;.rx_clk_in_n(rx_clk_in_n),.rx_clk_in_p(rx_clk_in_p),.rx_data_in_n(rx_data_in_n),.rx_data_in_p(rx_data_in_p),.rx_frame_in_n(rx_frame_in_n),.rx_frame_in_p(rx_frame_in_p),
修改为:
rx_clk_in,rx_data_in,rx_frame_in,input rx_clk_in;input [11:0]rx_data_in;input rx_frame_in;wire rx_clk_in;wire [11:0]rx_data_in;wire rx_frame_in;.rx_clk_in(rx_clk_in),.rx_data_in(rx_data_in),.rx_frame_in(rx_frame_in),把
tx_clk_out_n,tx_clk_out_p,tx_data_out_n,tx_data_out_p,tx_frame_out_n,tx_frame_out_p,output tx_clk_out_n;output tx_clk_out_p;output [5:0]tx_data_out_n;output [5:0]tx_data_out_p;output tx_frame_out_n;output tx_frame_out_p;wire tx_clk_out_n;wire tx_clk_out_p;wire [5:0]tx_data_out_n;wire [5:0]tx_data_out_p;wire tx_frame_out_n;wire tx_frame_out_p;.tx_clk_out_n(tx_clk_out_n),.tx_clk_out_p(tx_clk_out_p),.tx_data_out_n(tx_data_out_n),.tx_data_out_p(tx_data_out_p),.tx_frame_out_n(tx_frame_out_n),.tx_frame_out_p(tx_frame_out_p),
修改为:
tx_clk_out,tx_data_out,tx_frame_out,output tx_clk_out;output [11:0]tx_data_out;output tx_frame_out;wire tx_clk_out;wire [11:0]tx_data_out;wire tx_frame_out;.tx_clk_out(tx_clk_out),.tx_data_out(tx_data_out),.tx_frame_out(tx_frame_out),修改 systm_top.v
把
input rx_clk_in_p,input rx_clk_in_n,input rx_frame_in_p,input rx_frame_in_n,input [ 5:0] rx_data_in_p,input [ 5:0] rx_data_in_n,output tx_clk_out_p,output tx_clk_out_n,output tx_frame_out_p,output tx_frame_out_n,output [ 5:0] tx_data_out_p,output [ 5:0] tx_data_out_n,修改为:input rx_clk_in,input rx_frame_in,input [ 11:0] rx_data_in,output tx_clk_out,output tx_frame_out,output [ 11:0] tx_data_out_p,
把
.rx_clk_in_n (rx_clk_in_n),.rx_clk_in_p (rx_clk_in_p),.rx_data_in_n (rx_data_in_n),.rx_data_in_p (rx_data_in_p),.rx_frame_in_n (rx_frame_in_n),.rx_frame_in_p (rx_frame_in_p),.tx_clk_out_n (tx_clk_out_n),.tx_clk_out_p (tx_clk_out_p),.tx_data_out_n (tx_data_out_n),.tx_data_out_p (tx_data_out_p),.tx_frame_out_n (tx_frame_out_n),.tx_frame_out_p (tx_frame_out_p),
修改为:
.rx_clk_in (rx_clk_in),.rx_data_in (rx_data_in),.rx_frame_in (rx_frame_in),.tx_clk_out (tx_clk_out),.tx_data_out (tx_data_out),.tx_frame_out (tx_frame_out),并添加
wire [31:0] gpio_bd;wire gpio_muxout_tx;wire gpio_muxout_rx;
不加怕影响到GPIO引脚号。
vivado2018还需要打开 axi_ad9361的ip,ADC_IODELAY_ENABLE 设置为0
ad_data_in.v中
把
parameter IODELAY_ENABLE = 1,
修改为:
parameter IODELAY_ENABLE = 0,
并把 axi_ad9361_cmos_if.v中的 ad_data_in 都设置 .IODELAY_CTRL (0),
参考:AD-FMCOMMS3-EBZ 调试 Tuning TX/RX FAILED!,https://blog.csdn.net/Claud_Ma/article/details/120837057
1.3.5 适配引脚
修改引脚约束文件为以下内容,(编辑文件 Sources -> Constrants -> constrs_1 -> system_constr.xdc):
# constraints
# ad9361set_property -dict {PACKAGE_PIN P18 IOSTANDARD LVCMOS18} [get_ports gpio_en_agc] ;
set_property -dict {PACKAGE_PIN W19 IOSTANDARD LVCMOS18} [get_ports gpio_resetb] ;
set_property -dict {PACKAGE_PIN P15 IOSTANDARD LVCMOS18} [get_ports gpio_sync] ;set_property -dict {PACKAGE_PIN V8 IOSTANDARD LVCMOS18} [get_ports gpio_ctl[0]] ;
set_property -dict {PACKAGE_PIN W8 IOSTANDARD LVCMOS18} [get_ports gpio_ctl[1]] ;
set_property -dict {PACKAGE_PIN W10 IOSTANDARD LVCMOS18} [get_ports gpio_ctl[2]] ;
set_property -dict {PACKAGE_PIN W9 IOSTANDARD LVCMOS18} [get_ports gpio_ctl[3]] ;
set_property -dict {PACKAGE_PIN U7 IOSTANDARD LVCMOS18} [get_ports gpio_status[0]] ;
set_property -dict {PACKAGE_PIN V7 IOSTANDARD LVCMOS18} [get_ports gpio_status[1]] ;
set_property -dict {PACKAGE_PIN T9 IOSTANDARD LVCMOS18} [get_ports gpio_status[2]] ;
set_property -dict {PACKAGE_PIN U10 IOSTANDARD LVCMOS18} [get_ports gpio_status[3]] ;
set_property -dict {PACKAGE_PIN Y7 IOSTANDARD LVCMOS18} [get_ports gpio_status[4]] ;
set_property -dict {PACKAGE_PIN Y6 IOSTANDARD LVCMOS18} [get_ports gpio_status[5]] ;
set_property -dict {PACKAGE_PIN Y9 IOSTANDARD LVCMOS18} [get_ports gpio_status[6]] ;
set_property -dict {PACKAGE_PIN Y8 IOSTANDARD LVCMOS18} [get_ports gpio_status[7]] ; set_property -dict {PACKAGE_PIN N18 IOSTANDARD LVCMOS18} [get_ports rx_clk_in] ;
set_property -dict {PACKAGE_PIN R16 IOSTANDARD LVCMOS18} [get_ports rx_frame_in] ;
set_property -dict {PACKAGE_PIN V17 IOSTANDARD LVCMOS18} [get_ports rx_data_in[1]] ;
set_property -dict {PACKAGE_PIN V18 IOSTANDARD LVCMOS18} [get_ports rx_data_in[0]] ;
set_property -dict {PACKAGE_PIN Y18 IOSTANDARD LVCMOS18} [get_ports rx_data_in[3]] ;
set_property -dict {PACKAGE_PIN Y19 IOSTANDARD LVCMOS18} [get_ports rx_data_in[2]] ;
set_property -dict {PACKAGE_PIN T17 IOSTANDARD LVCMOS18} [get_ports rx_data_in[5]] ;
set_property -dict {PACKAGE_PIN R18 IOSTANDARD LVCMOS18} [get_ports rx_data_in[4]] ;
set_property -dict {PACKAGE_PIN V20 IOSTANDARD LVCMOS18} [get_ports rx_data_in[7]] ;
set_property -dict {PACKAGE_PIN W20 IOSTANDARD LVCMOS18} [get_ports rx_data_in[6]] ;
set_property -dict {PACKAGE_PIN T20 IOSTANDARD LVCMOS18} [get_ports rx_data_in[9]] ;
set_property -dict {PACKAGE_PIN U20 IOSTANDARD LVCMOS18} [get_ports rx_data_in[8]] ;
set_property -dict {PACKAGE_PIN V16 IOSTANDARD LVCMOS18} [get_ports rx_data_in[11]] ;
set_property -dict {PACKAGE_PIN W16 IOSTANDARD LVCMOS18} [get_ports rx_data_in[10]] ; set_property -dict {PACKAGE_PIN U14 IOSTANDARD LVCMOS18} [get_ports tx_clk_out] ;
set_property -dict {PACKAGE_PIN V15 IOSTANDARD LVCMOS18} [get_ports tx_frame_out] ;
set_property -dict {PACKAGE_PIN P14 IOSTANDARD LVCMOS18} [get_ports tx_data_out[1]] ;
set_property -dict {PACKAGE_PIN R14 IOSTANDARD LVCMOS18} [get_ports tx_data_out[0]] ;
set_property -dict {PACKAGE_PIN V12 IOSTANDARD LVCMOS18} [get_ports tx_data_out[3]] ;
set_property -dict {PACKAGE_PIN W13 IOSTANDARD LVCMOS18} [get_ports tx_data_out[2]] ;
set_property -dict {PACKAGE_PIN W14 IOSTANDARD LVCMOS18} [get_ports tx_data_out[5]] ;
set_property -dict {PACKAGE_PIN Y14 IOSTANDARD LVCMOS18} [get_ports tx_data_out[4]] ;
set_property -dict {PACKAGE_PIN T14 IOSTANDARD LVCMOS18} [get_ports tx_data_out[7]] ;
set_property -dict {PACKAGE_PIN T15 IOSTANDARD LVCMOS18} [get_ports tx_data_out[6]] ;
set_property -dict {PACKAGE_PIN Y16 IOSTANDARD LVCMOS18} [get_ports tx_data_out[9]] ;
set_property -dict {PACKAGE_PIN Y17 IOSTANDARD LVCMOS18} [get_ports tx_data_out[8]] ;
set_property -dict {PACKAGE_PIN T16 IOSTANDARD LVCMOS18} [get_ports tx_data_out[11]] ;
set_property -dict {PACKAGE_PIN U17 IOSTANDARD LVCMOS18} [get_ports tx_data_out[10]] ; set_property -dict {PACKAGE_PIN P16 IOSTANDARD LVCMOS18} [get_ports txnrx] ;
set_property -dict {PACKAGE_PIN N17 IOSTANDARD LVCMOS18} [get_ports enable] ; set_property -dict {PACKAGE_PIN T10 IOSTANDARD LVCMOS18 PULLTYPE PULLUP} [get_ports spi_csn] ;
set_property -dict {PACKAGE_PIN T11 IOSTANDARD LVCMOS18} [get_ports spi_clk] ;
set_property -dict {PACKAGE_PIN T12 IOSTANDARD LVCMOS18} [get_ports spi_mosi] ;
set_property -dict {PACKAGE_PIN U12 IOSTANDARD LVCMOS18} [get_ports spi_miso] ; # spi pmod JA1
set_property -dict {PACKAGE_PIN W11 IOSTANDARD LVCMOS18} [get_ports pl_spi_clk_o] ;
set_property -dict {PACKAGE_PIN U9 IOSTANDARD LVCMOS18} [get_ports pl_spi_miso] ;
set_property -dict {PACKAGE_PIN U8 IOSTANDARD LVCMOS18} [get_ports pl_spi_mosi] ;
set_property -dict {PACKAGE_PIN T5 IOSTANDARD LVCMOS18} [get_ports iic_scl] ;
set_property -dict {PACKAGE_PIN U5 IOSTANDARD LVCMOS18} [get_ports iic_sda] ; # clocks
create_clock -name rx_clk -period 16.27 [get_ports rx_clk_in]修改引脚约束文件(编辑文件 Sources -> Constrants -> constrs_1 -> zed_system_constr.xdc):
#只留下以下内容:
# Define SPI clock
#create_clock -name spi0_clk -period 40 [get_pins -hier */EMIOSPI0SCLKO]
#create_clock -name spi1_clk -period 40 [get_pins -hier */EMIOSPI1SCLKO]
修改 system_top.v。
注释掉端口:
// inout [31:0] gpio_bd,// output hdmi_out_clk,
// output hdmi_vsync,
// output hdmi_hsync,
// output hdmi_data_e,
// output [15:0] hdmi_data,// output i2s_mclk,
// output i2s_bclk,
// output i2s_lrclk,
// output i2s_sdata_out,
// input i2s_sdata_in,// output spdif,// inout iic_scl,
// inout iic_sda,
// inout [ 1:0] iic_mux_scl,
// inout [ 1:0] iic_mux_sda,// input otg_vbusoc,// inout gpio_muxout_tx,
// inout gpio_muxout_rx,
// output spi_udc_csn_tx,
// output spi_udc_csn_rx,
// output spi_udc_sclk,
// output spi_udc_data// ad_iobuf #(.DATA_WIDTH(2)) i_iobuf_iic_scl (
// .dio_t ({iic_mux_scl_t_s,iic_mux_scl_t_s}),
// .dio_i (iic_mux_scl_o_s),
// .dio_o (iic_mux_scl_i_s),
// .dio_p (iic_mux_scl));// ad_iobuf #(.DATA_WIDTH(2)) i_iobuf_iic_sda (
// .dio_t ({iic_mux_sda_t_s,iic_mux_sda_t_s}),
// .dio_i (iic_mux_sda_o_s),
// .dio_o (iic_mux_sda_i_s),
// .dio_p (iic_mux_sda));
修改 system_wrapper.v
// IOBUF iic_fmc_scl_iobuf
// (.I(iic_fmc_scl_o),
// .IO(iic_fmc_scl_io),
// .O(iic_fmc_scl_i),
// .T(iic_fmc_scl_t));
// IOBUF iic_fmc_sda_iobuf
// (.I(iic_fmc_sda_o),
// .IO(iic_fmc_sda_io),
// .O(iic_fmc_sda_i),
// .T(iic_fmc_sda_t));
1.3.6 xadc(ad9363的noos工程,和ad9361的区别是需要取消注释:#define AXI_ADC_NOT_PRESENT)
创建一个 xadc
Diagram -> + -> XADC Wizard ->
双击 xadc_wiz_0 -> -> Basic -> Interface Options -> AXI4Lite-> Startup Channel Selection -> Channel Sequencer-> Timing Mode: Continuous Mode-> DRP Timing Options -> DCLK 100M-> ADC Setup-> Sequencer Mode: Continuous-> Alarms -> 全部取消勾选-> Channel Sequencer-> 勾选 TEMPERATURE-> 勾选 VCCINT-> 勾选 VCCAUX-> 勾选 VCCBRAM-> 勾选 VCCPINT-> 勾选 VCCPAUX-> 勾选 VCCDDRO-> 勾选 VP/VN
-> OK连线
Run Connection Automation -> OK
1.4 编译
Run Synthesis
Run Implementation
Generate Bitstream
1.5 导出 hdf
Vivado -> File -> Export -> Export Hardware ->
-> Include bitstream -> OKVivado -> File -> Launch SDK -> OK
得到
/home/xxjianvm/work/pzp203/ad9361os/hdl-2019_r1/projects/pluto/pluto.sdk/system_top_hw_platform_0/system.hdf
2. no-os sdk
2.1 hello
File -> New -> Application Project-> Project name: ad9361_test-> Finish编译
调试
Debug As -> Launch on Hardware (system debugger)Debug Configuration -> Target Setup-> 勾选 Reset entire system-> 勾选 Program FPGA板子记得调到JTAG模式。
串口权限
ls /dev/ttyUSB*
sudo chmod 666 /dev/ttyUSB0永久修改
whoami
该用户添加至dialout用户组,因为tty设备是属于dialout用户组
sudo usermod -aG dialout xxjianvm看到SDK Terminal打印
hello world
2.2 添加 ad9361 驱动
拷贝源码
把
~/work/zynq_dev/ad9361noos/no-OS-2019_R1/ad9361/sw
~/work/zynq_dev/ad9361noos/no-OS-2019_R1/ad9361/sw/console_commands
~/work/zynq_dev/ad9361noos/no-OS-2019_R1/ad9361/sw/platform_xilinx
内的源文件(*.c,*.h)拷贝到
~/work/pzp203/ad9361os/hdl-2019_r1/projects/fmcomms2/zed/fmcomms2_zed.sdk/ad9361noos/src
至于platform.c和platform.h,不覆盖源文件,把源码添加到各自的文件内。
删除 hello_world.c
2.3 修改源码
打开 command.c
把
#include "../ad9361_api.h"
修改为
#include "ad9361_api.h"打开 config.h
取消注释:
#define CONSOLE_COMMANDS
#define XILINX_PLATFORM
#define AXI_ADC_NOT_PRESENT
编译调试下载。
2.4 用串口命令发送
help?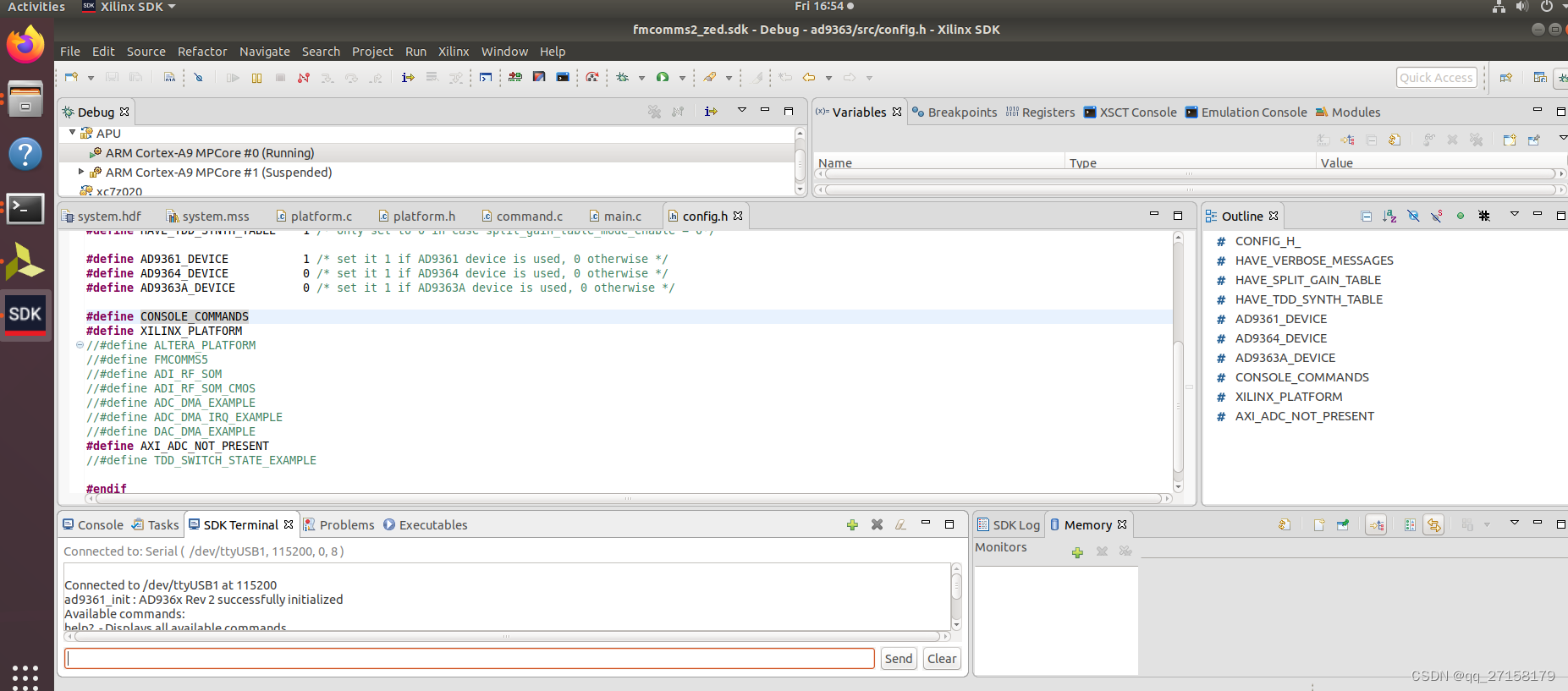
参考:
[1]windows 下AD9361的 no-os master 工程搭建,https://blog.csdn.net/weixin_37728585/article/details/104835364
[2]https://wiki.analog.com/resources/fpga/docs/hdl
[3]https://wiki.analog.com/resources/eval/user-guides/ad-fmcomms2-ebz/software/no-os-setup
[4]https://wiki.analog.com/resources/eval/user-guides/ad-fmcomms2-ebz/software/baremetal
[5]https://ez.analog.com/rf/wide-band-rf-transceivers/tes-gui-and-api-software-ad9371-ad9375/f/q-a/80764/how-to-use-ad9361-no-os-setup



![[MTK6771] android13系统启用OMAPI 支持esim.me](https://img-blog.csdnimg.cn/direct/d2167079167e430c85317c290c2d2b99.png)
![那就别担心了[天梯赛 -- 深度优先遍历]](https://img-blog.csdnimg.cn/direct/de05f49923c84c80ba16ab5a954604ae.png)