目录
引言:
1.0 术语定义
2.0 基本知识
2.1 运动系统工艺对象
2.2 坐标系与标架
3.0 运动机构系统类型
3.1 直角坐标型
3.2 轮腿型
3.3 平面关节型
3.4 关节型
3.5 并联型
3.6 圆柱坐标型
3.7 三轴型
4.0 运动系统的运动
4.1 运动类型
4.1.1 线性运动
4.1.2 圆周运动
5.0 区域监视
6.0 编程调试
7.0 运行测试
总结:
引言:
Siemens S7-1500T CPU 是一种高性能的SIMATIC可编程逻辑控制器(PLC),设计用于在工业环境中执行复杂的运动控制任务。以下是该CPU的一些关键运动控制功能:
-
集成运动控制功能:S7-1500T支持直接在CPU内进行运动控制,无需额外的运动控制单元,可以控制伺服电机或步进电机。
-
多轴控制:它能够同步控制多个轴,适合于需要精确协调运动的应用,如包装机械、印刷机或机器人系统。
-
直接驱动(Direct Drive)支持:通过与S120等动力模块配合,S7-1500T支持高精度的直接驱动技术,减少机械传动部件,提高效率和精度。
-
高级工艺对象:提供多种预定义的轴工艺对象,简化了编程,比如定位、速度控制、相对/绝对位置移动等。
-
通信能力:通过PROFINET IO,CPU能快速交换运动控制指令和状态信息,保证高速实时性能。
-
诊断与故障处理:具有强大的在线诊断功能,可以快速识别并解决运动控制过程中的问题。
-
软件支持:使用TIA Portal和StartDrive软件,用户可以进行方便的配置、调试和故障排除。
俗话说不会PLC的 .NET CORE 后端开发不是好的软件开发,那么今天就与各位朋友和老师一同探讨Siemens S7-1500TCPU的运动机构系统,我个人感觉运动机构功能完全能取代一些小型机器人的工作。西门子也是用过众多PLC品牌中最具特色的一款PLC。
1.0 术语定义
2.0 基本知识
2.1 运动系统工艺对象
2.2 坐标系与标架
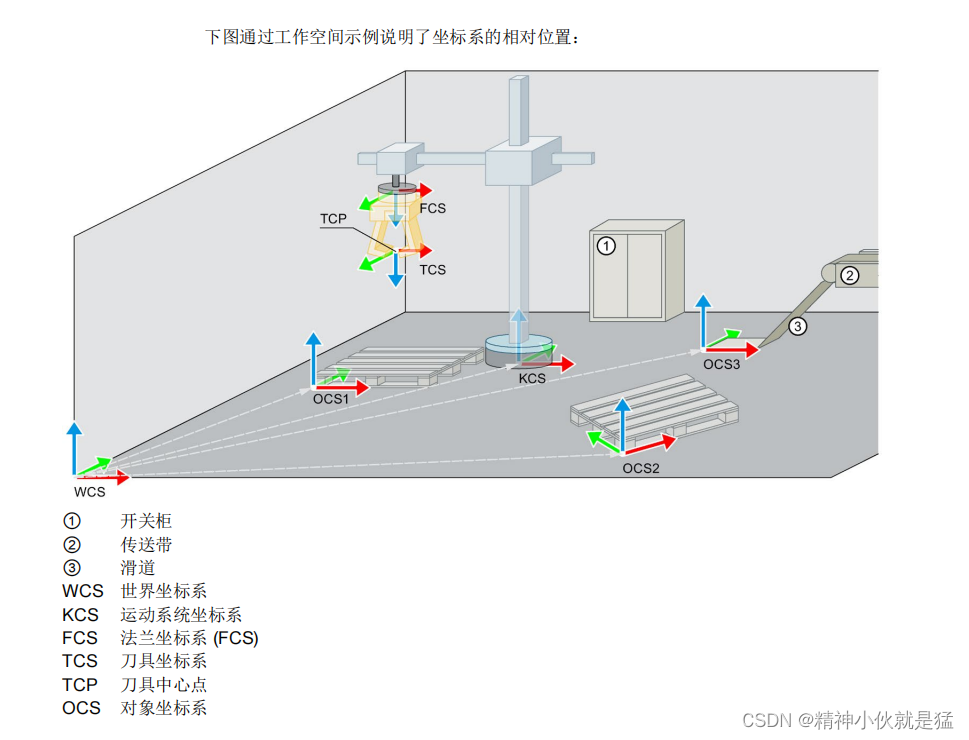
坐标系与标架概述:一个处理任务涉及许多对象,例如运动系统、刀具、托盘和产品。可使用坐标系和标架描述这些对象及其相对位置。运动系统工艺对象计算刀具中心点 (TCP) 的所有运动。
标架:标架指定一个坐标系相对于另一个坐标系的平移和旋转。
3.0 运动机构系统类型
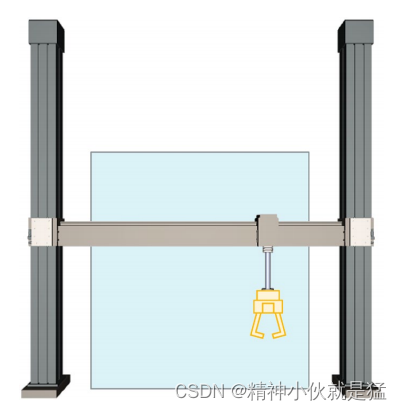
3.1 直角坐标型
2D 直角坐标型、2D 直角坐标型(带定位功能)、3D 直角坐标型、3D 直角坐标型(带定位功能)
3.2 轮腿型
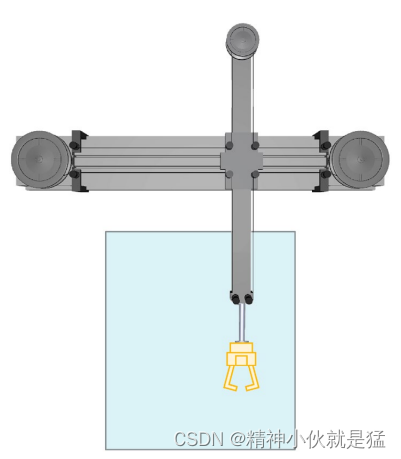
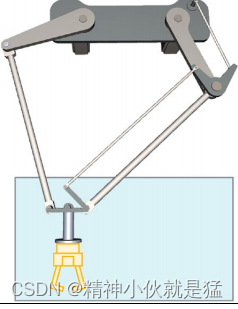
3.3 平面关节型
3D 平面关节型(带定位功能)
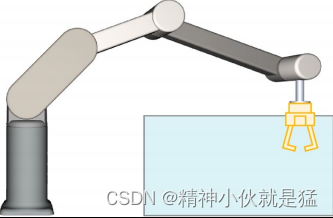
3.4 关节型
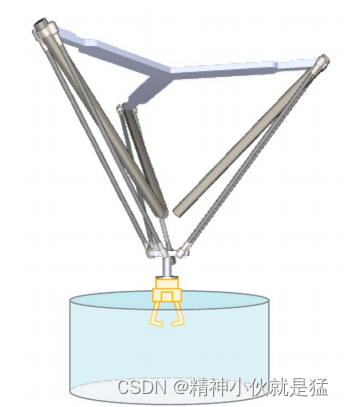
3.5 并联型
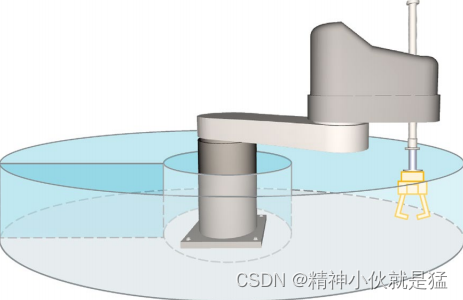
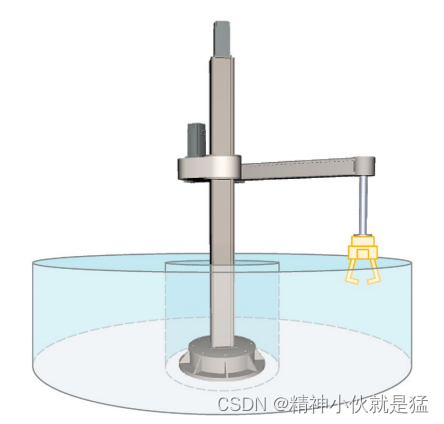
3.6 圆柱坐标型
3.7 三轴型
4.0 运动系统的运动
4.1 运动类型
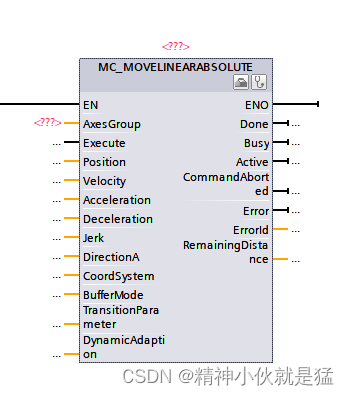
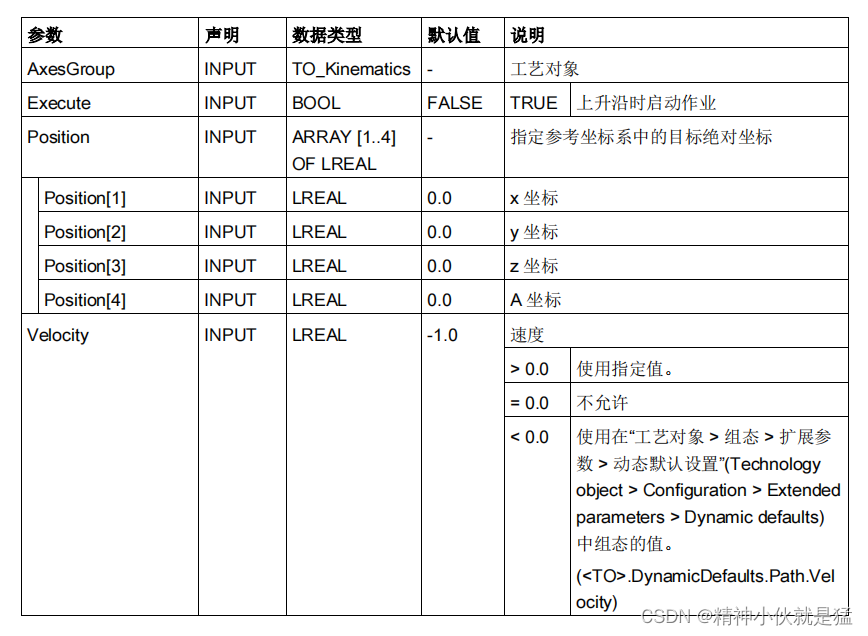
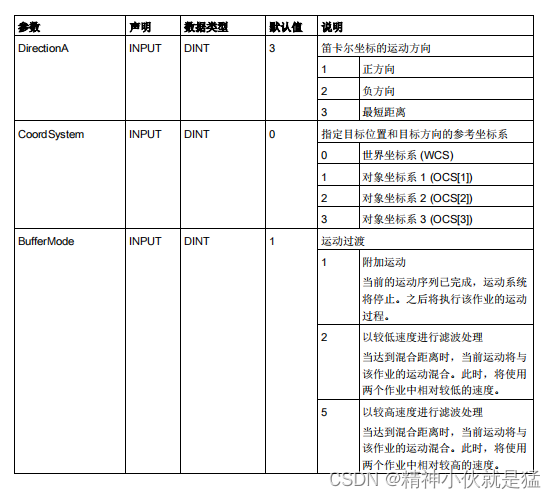
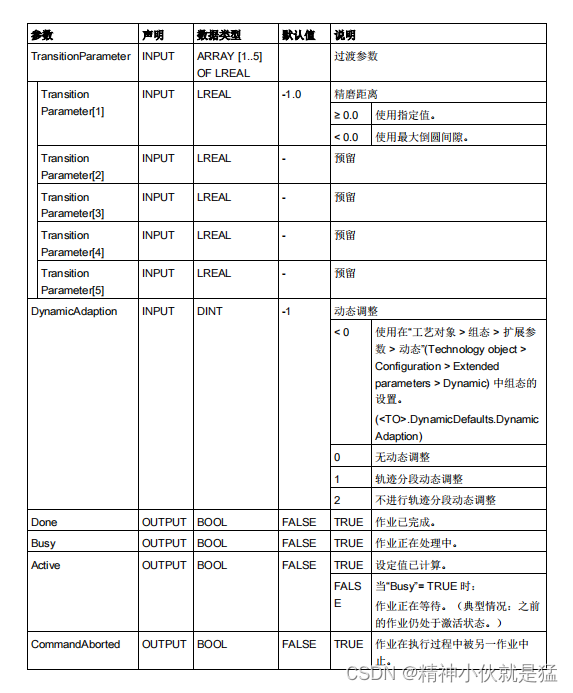
4.1.1 线性运动

4.1.2 圆周运动
5.0 区域监视
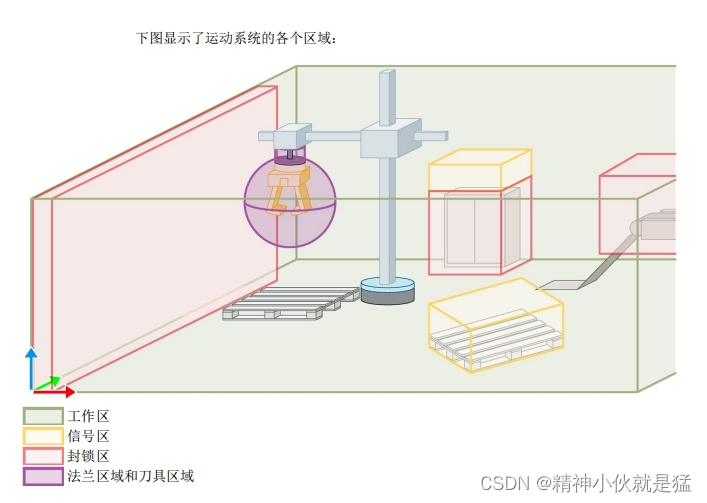
| 超出区域 | 响应 | 说明 |
| 退出工作区 | 报警且停止 | 运动系统工艺对象输出一个工艺报警。运动将停止。 |
| 进入信号区 | 报警但不停止 | 运动系统工艺对象输出一个工艺报警。运动系统的运动将继续。 |
| 进入封锁区 | 报警且停止 | 运动系统工艺对象输出一个工艺报警。运动将停止。运动系统超出区域的制动轨迹长度最小。 |
6.0 编程调试
有于一些原因我不能直接提供代码程序,但是我可以提供一个编程思路。在编程时需要提供运动机构的多轴移动点位的实际位置。这样的话,点位是比较多的。我们不能写一个for循环来完成全部的点位移动,这样CPU的看门狗就会报警。但是我们可以写 “扫描循环的for循环” 就是扫描周期持续执行,每完成一个点位的运动就把下一个运动点位的位置传给移动指令进行位移,扫描周期还会继续往下执行。并不像传统的for一样,在一个扫描周期内执行完毕。
7.0 运行测试
这是之前做的一个程序。扫描仪扫描轮胎外轮廓数据,扫描点位下发至PLC。PLC根据扫描点位进行位移。这是最终的运行结果。(这是运动轨迹的运行视频Siemens S7-1500 CPU运动机构的行走运动轨迹-CSDN直播)
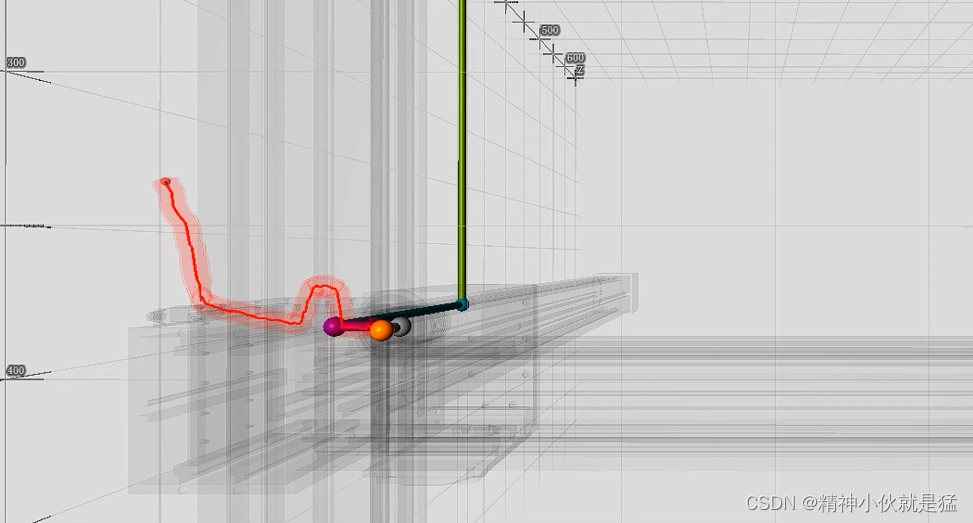
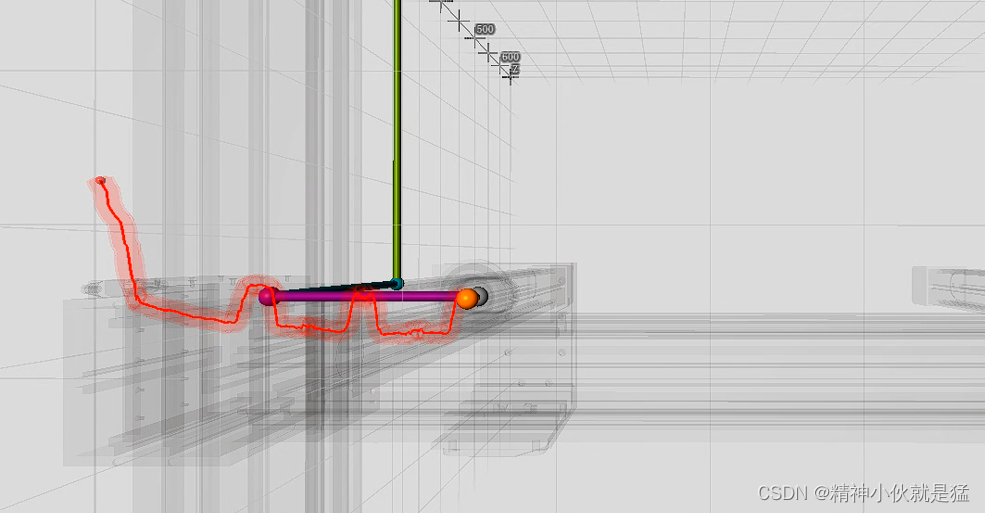
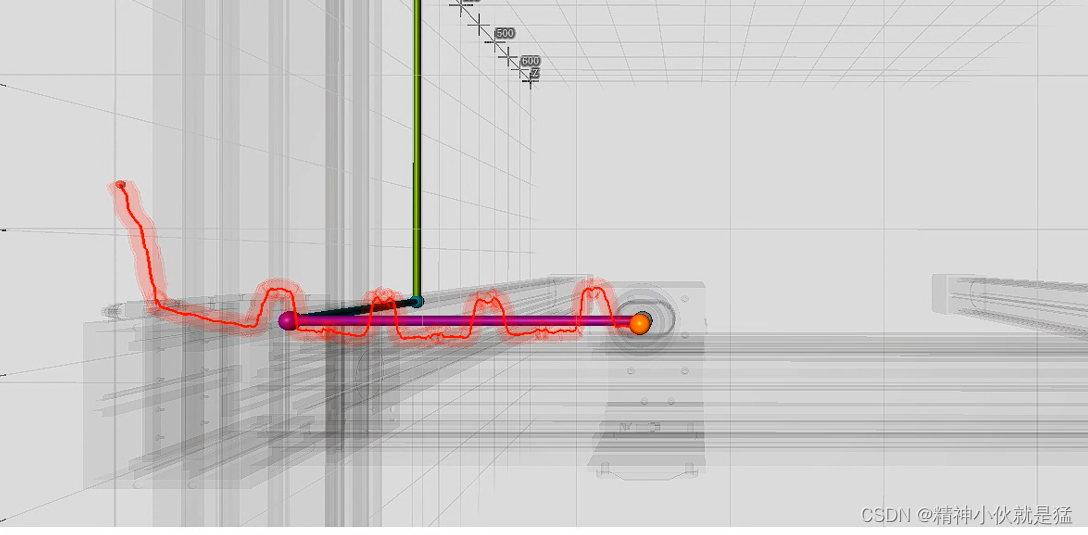
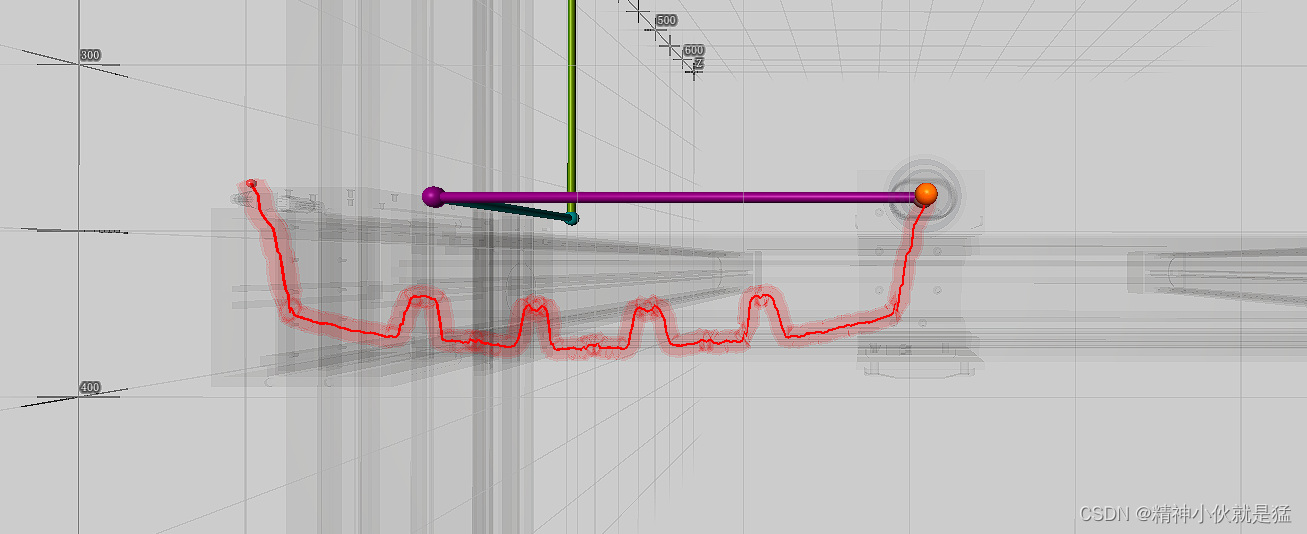
运动机构完全根据扫描的轮胎外轮廓进行位移。
总结:
西门子PLC的TCPU中的运动机构功能可以代替一些小型机器人,完成普通轴无法完成的空间和坐标系无法完成的任务。