返回:OpenCV系列文章目录(持续更新中......)
上一篇:OpenCV 如何使用 XML 和 YAML 文件的文件输入和输出
下一篇:OpenCV系列文章目录(持续更新中......)

目标
本教程的目的是演示如何使用 OpenCV 框架轻松并行化代码。为了说明parallel_for_这个概念,我们将编写一个程序来对图像执行卷积运算。完整的教程代码在这里。
前提
并行框架
第一个先决条件是使用并行框架构建 OpenCV。在 OpenCV 4.5 中,以下并行框架按此顺序提供:
- 英特尔线程构建模块(第三方库,应显式启用)
- OpenMP(集成到编译器中,应显式启用)
- APPLE GCD(系统范围,自动使用(仅限 APPLE))
- Windows RT 并发(系统范围,自动使用(仅限 Windows RT))
- Windows 并发(运行时的一部分,自动使用(仅限 Windows - MSVC++ >= 10))
- 螺纹
如您所见,OpenCV 库中可以使用多个并行框架。一些并行库是第三方库,在构建之前必须在 CMake 中显式启用,而其他并行库则在平台上自动可用(例如 APPLE GCD)。
假如条件
当多个线程尝试同时写入或读取和写入特定内存位置时,会出现争用情况。基于此,我们可以将算法大致分为两类:-
- 只有单个线程将数据写入特定内存位置的算法。
- 例如,在卷积中,即使多个线程可以在特定时间从一个像素读取,也只有一个线程写入特定像素。
- 多个线程可以写入单个内存位置的算法。
- 寻找轮廓、特征等。这种算法可能要求每个线程同时向全局变量添加数据。例如,在检测特征时,每个线程会将其图像各自部分的特征添加到公共向量中,从而创建争用条件。
卷积
我们将使用执行卷积的示例来演示parallel_for_ 并行化计算的用法。这是一个不会导致争用条件的算法示例。
理论
卷积是一种在图像处理中广泛使用的简单数学运算。在这里,我们在图像上滑动一个较小的矩阵,称为内核,内核中像素值和相应值的乘积之和为我们提供了输出中特定像素的值(称为内核的锚点)。根据内核中的值,我们得到不同的结果。在下面的示例中,我们使用一个 3x3 内核(锚定在其中心)并在 5x5 矩阵上卷积以生成一个 3x3 矩阵。可以通过用合适的值填充输入来更改输出的大小。
有关不同内核及其作用的更多信息,请查看此处
在本教程中,我们将实现最简单的函数形式,该函数采用灰度图像(1 通道)和奇数长度的方形核并生成输出图像。该操作将不会就地执行。
注意
我们可以暂时存储一些相关的像素,以确保我们在卷积期间使用原始值,然后就地进行。但是,本教程的目的是介绍parallel_for_函数,就地实现可能过于复杂。
伪代码
InputImage src, OutputImage dst, kernel(size n)
makeborder(src, n/2)
for each pixel (i, j) strictly inside borders, do:
{value := 0for k := -n/2 to n/2, do:for l := -n/2 to n/2, do:value += kernel[n/2 + k][n/2 + l]*src[i + k][j + l]dst[i][j] := value
}对于 n 大小的内核,我们将添加大小为 n/2 的边框来处理边缘情况。然后,我们运行两个循环来沿内核移动并将乘积相加
实现
顺序实现
void conv_seq(Mat src, Mat &dst, Mat kernel)
{int rows = src.rows, cols = src.cols;dst = Mat(rows, cols, src.type());// Taking care of edge values// Make border = kernel.rows / 2;int sz = kernel.rows / 2;copyMakeBorder(src, src, sz, sz, sz, sz, BORDER_REPLICATE);for (int i = 0; i < rows; i++){uchar *dptr = dst.ptr(i);for (int j = 0; j < cols; j++){double value = 0;for (int k = -sz; k <= sz; k++){// slightly faster results when we create a ptr due to more efficient memory access.uchar *sptr = src.ptr(i + sz + k);for (int l = -sz; l <= sz; l++){value += kernel.ptr<double>(k + sz)[l + sz] * sptr[j + sz + l];}}dptr[j] = saturate_cast<uchar>(value);}}
}我们首先制作一个与 src 大小相同的输出矩阵 (dst),并在 src 图像中添加边框(以处理边缘情况)。
int rows = src.rows, cols = src.cols;
dst = Mat(rows, cols, src.type());
// Taking care of edge values
// Make border = kernel.rows / 2;
int sz = kernel.rows / 2;
copyMakeBorder(src, src, sz, sz, sz, sz, BORDER_REPLICATE);然后,我们按顺序迭代 src 图像中的像素,并计算内核和相邻像素值的值。然后,我们将值填充到 dst 图像中的相应像素。
for (int i = 0; i < rows; i++){uchar *dptr = dst.ptr(i);for (int j = 0; j < cols; j++){double value = 0;for (int k = -sz; k <= sz; k++){// slightly faster results when we create a ptr due to more efficient memory access.uchar *sptr = src.ptr(i + sz + k);for (int l = -sz; l <= sz; l++){value += kernel.ptr<double>(k + sz)[l + sz] * sptr[j + sz + l];}}dptr[j] = saturate_cast<uchar>(value);}}并行实施
在查看顺序实现时,我们可以注意到每个像素都依赖于多个相邻像素,但一次只编辑一个像素。因此,为了优化计算,我们可以将图像拆分为条带,并通过利用现代处理器的多核架构对每个条带并行执行卷积。OpenCV cv::p arallel_for_ 框架自动决定如何有效地拆分计算,并为我们完成大部分工作。
注意
尽管特定条带中的像素值可能取决于条带外的像素值,但这些只是只读操作,因此不会导致未定义的行为。
我们首先声明一个继承自 cv::ParallelLoopBody 的自定义类,并覆盖 .virtual void operator ()(const cv::Range& range) const
We first declare a custom class that inherits from cv::ParallelLoopBody and override the virtual void operator ()(const cv::Range& range) const.
class parallelConvolution : public ParallelLoopBody
{
private:Mat m_src, &m_dst;Mat m_kernel;int sz;public:parallelConvolution(Mat src, Mat &dst, Mat kernel): m_src(src), m_dst(dst), m_kernel(kernel){sz = kernel.rows / 2;}virtual void operator()(const Range &range) const CV_OVERRIDE{for (int r = range.start; r < range.end; r++){int i = r / m_src.cols, j = r % m_src.cols;double value = 0;for (int k = -sz; k <= sz; k++){uchar *sptr = m_src.ptr(i + sz + k);for (int l = -sz; l <= sz; l++){value += m_kernel.ptr<double>(k + sz)[l + sz] * sptr[j + sz + l];}}m_dst.ptr(i)[j] = saturate_cast<uchar>(value);}}
};operator ()中的范围表示将由单个线程处理的值的子集。根据要求,可能有不同的方法来分割范围,这反过来又会改变计算。
例如,我们可以
-
拆分图像的整个遍历,并按以下方式获取 [row, col] 坐标(如上代码所示):
virtual void operator()(const Range &range) const CV_OVERRIDE{for (int r = range.start; r < range.end; r++){int i = r / m_src.cols, j = r % m_src.cols;double value = 0;for (int k = -sz; k <= sz; k++){uchar *sptr = m_src.ptr(i + sz + k);for (int l = -sz; l <= sz; l++){value += m_kernel.ptr<double>(k + sz)[l + sz] * sptr[j + sz + l];}}m_dst.ptr(i)[j] = saturate_cast<uchar>(value);}}然后,我们将按以下方式调用 parallel_for_ 函数:
parallelConvolution obj(src, dst, kernel);parallel_for_(Range(0, rows * cols), obj);拆分行并计算每行:
virtual void operator()(const Range &range) const CV_OVERRIDE{for (int i = range.start; i < range.end; i++){uchar *dptr = dst.ptr(i);for (int j = 0; j < cols; j++){double value = 0;for (int k = -sz; k <= sz; k++){uchar *sptr = src.ptr(i + sz + k);for (int l = -sz; l <= sz; l++){value += kernel.ptr<double>(k + sz)[l + sz] * sptr[j + sz + l];}}dptr[j] = saturate_cast<uchar>(value);}}}在本例中,我们调用具有不同范围的 parallel_for_ 函数:
parallelConvolutionRowSplit obj(src, dst, kernel);parallel_for_(Range(0, rows), obj);
注意
在我们的例子中,两种实现的性能相似。在某些情况下,可能会提供更好的内存访问模式或其他性能优势。
若要设置线程数,可以使用: cv::setNumThreads。您还可以使用 cv::p arallel_for_ 中的 nstripes 参数指定拆分次数。例如,如果您的处理器有 4 个线程,则设置cv::setNumThreads(2)或设置nstripes=2应与默认情况下相同,它将使用所有可用的处理器线程,但仅在两个线程上拆分工作负载。
注意
C++ 11 标准允许通过删除类parallelConvolution并将其替换为 lambda 表达式来简化并行实现:
parallel_for_(Range(0, rows * cols), [&](const Range &range){for (int r = range.start; r < range.end; r++){int i = r / cols, j = r % cols;double value = 0;for (int k = -sz; k <= sz; k++){uchar *sptr = src.ptr(i + sz + k);for (int l = -sz; l <= sz; l++){value += kernel.ptr<double>(k + sz)[l + sz] * sptr[j + sz + l];}}dst.ptr(i)[j] = saturate_cast<uchar>(value);}});在
- 512x512 输入和 5x5 内核
This program shows how to use the OpenCV parallel_for_ function andcompares the performance of the sequential and parallel implementations for aconvolution operationUsage:./a.out [image_path -- default lena.jpg]Sequential Implementation: 0.0953564sParallel Implementation: 0.0246762sParallel Implementation(Row Split): 0.0248722s-
512x512 输入,带有 3x3 内核 并行实现的性能取决于您拥有的 CPU 类型。例如,在 4 核 - 8 线程 CPU 上,运行时可能比顺序实现快 6 到 7 倍。有很多因素可以解释为什么我们没有实现 8 倍的加速
This program shows how to use the OpenCV parallel_for_ function andcompares the performance of the sequential and parallel implementations for aconvolution operationUsage:./a.out [image_path -- default lena.jpg]Sequential Implementation: 0.0301325sParallel Implementation: 0.0117053sParallel Implementation(Row Split): 0.0117894s- 创建和管理线程的开销,
- 并行运行的后台进程,
- 4 个硬件内核(每个内核有 2 个逻辑线程)和 8 个硬件内核之间的区别。
在本教程中,我们使用了水平渐变滤镜(如上面的动画所示),它生成了一个突出显示垂直边缘的图像。
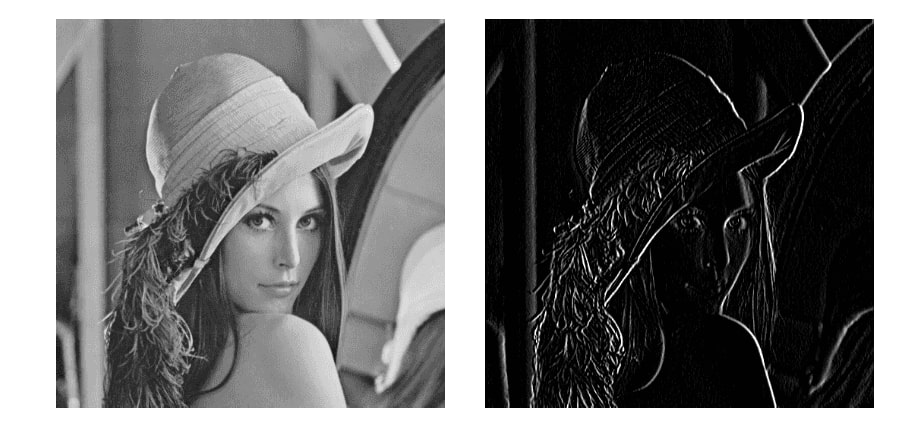
结果图像
参考文献:
1、How to use the OpenCV parallel_for_ to parallelize your code