简介
参考:
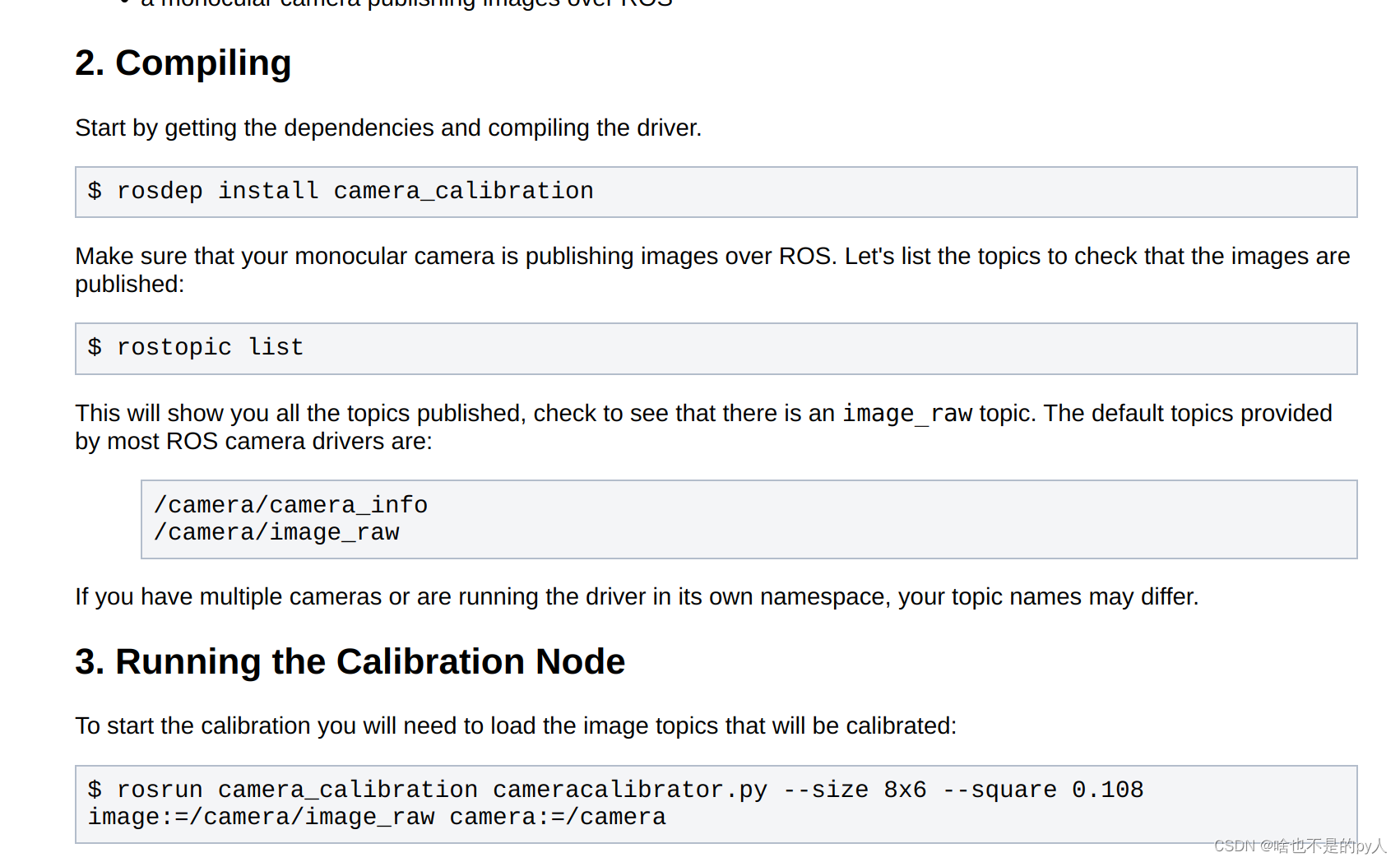
camera_calibration/Tutorials/MonocularCalibration - ROS Wiki
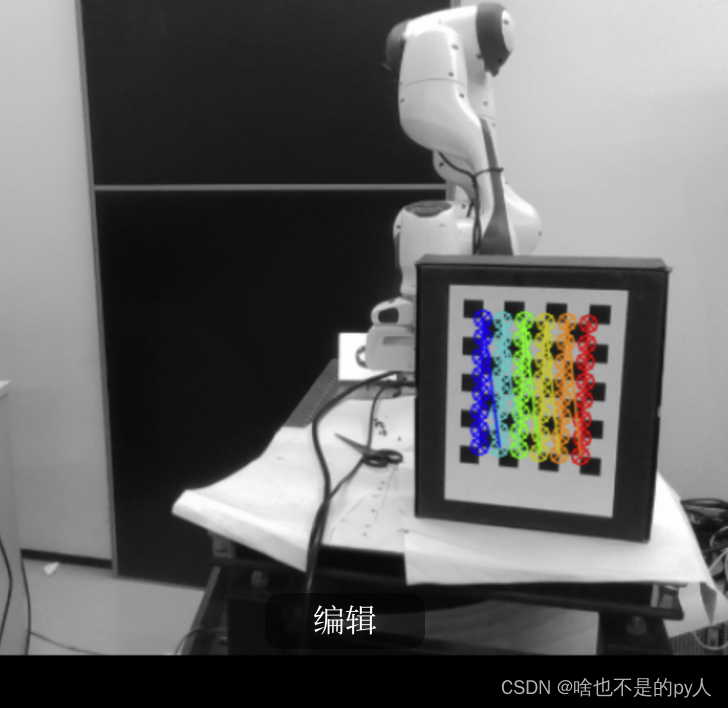
结果如下:
具体操作
安装
ros安装
先是安装ros
使用鱼香ros一键安装
推荐换源,哪怕有魔法
小鱼的一键安装系列 | 鱼香ROS
wget http://fishros.com/install -O fishros && . fishrosrealsense相关安装
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
使用可视化验证是否安装成功
realsense-viewer
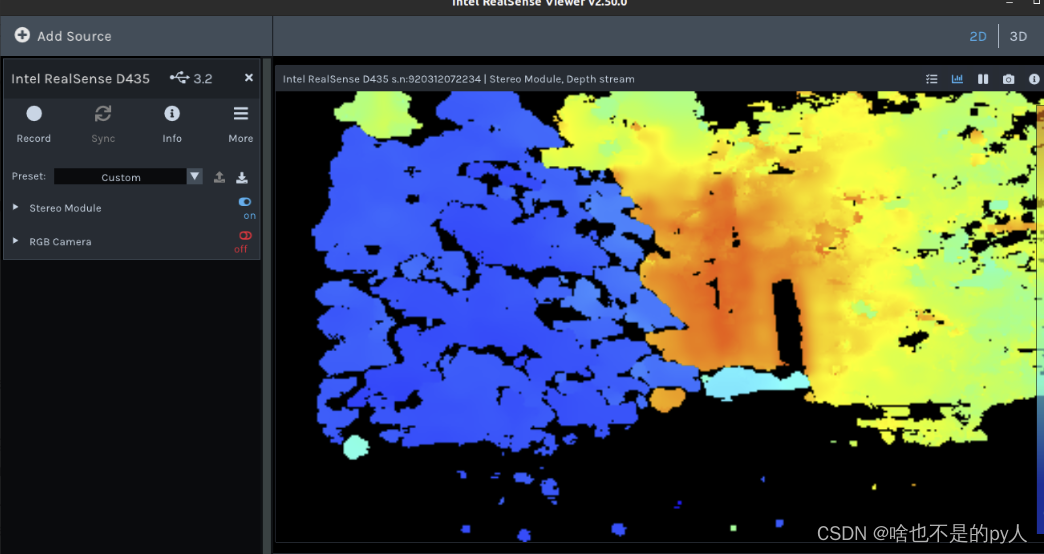
安装成功后
安装realsense ros
sudo apt-get install ros-$ROS_DISTRO-realsense2-camera
sudo apt-get install ros-$ROS_DISTRO-realsense2-description
安装完之后先重启
记得退出conda环境
然后运行
roslaunch realsense2_camera rs_camera.launch然后用rostopic检验是否出现很多camera的话题
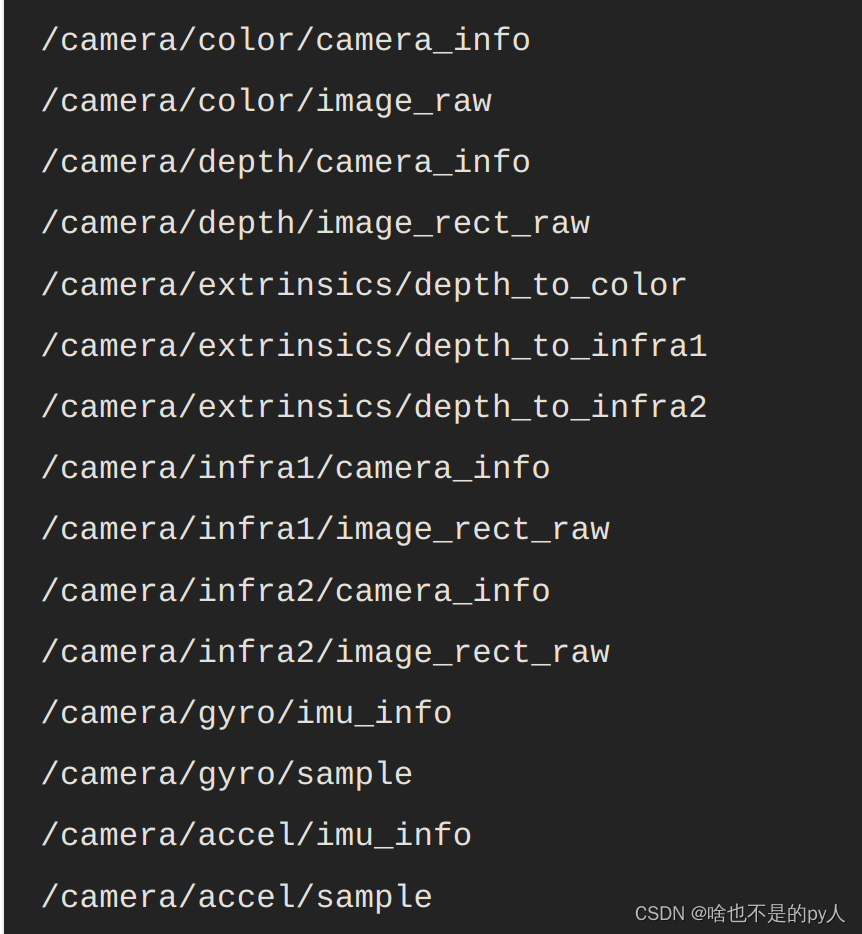
出现了即为安装成功
如果报错
failed to open usb interface: 0, error: RS2_USB_STATUS_ACCESS
那就:

ps:在系统目录下 sudo gedit会没反应
c掉再来一次就行
librealsense/config/99-realsense-libusb.rules at master · IntelRealSense/librealsense · GitHub
##Version=1.1##
# Device rules for Intel RealSense devices (R200, F200, SR300 LR200, ZR300, D400, L500, T200)
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0a80", MODE:="0666", GROUP:="plugdev", RUN+="/usr/local/bin/usb-R200-in_udev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0a66", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0aa5", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0abf", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0acb", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0ad0", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="04b4", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0ad1", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0ad2", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0ad3", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0ad4", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0ad5", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0ad6", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0af2", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0af6", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0afe", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0aff", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b00", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b01", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b03", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b07", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b0c", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b0d", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b3a", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b3d", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b48", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b49", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b4b", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b4d", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b52", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b5b", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b5c", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b64", MODE:="0666", GROUP:="plugdev"# Intel RealSense recovery devices (DFU)
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0ab3", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0adb", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0adc", MODE:="0666", GROUP:="plugdev"
SUBSYSTEMS=="usb", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b55", MODE:="0666", GROUP:="plugdev"# Intel RealSense devices (Movidius, T265)
SUBSYSTEMS=="usb", ENV{DEVTYPE}=="usb_device", ATTRS{idVendor}=="8087", ATTRS{idProduct}=="0af3", MODE="0666", GROUP="plugdev"
SUBSYSTEMS=="usb", ENV{DEVTYPE}=="usb_device", ATTRS{idVendor}=="8087", ATTRS{idProduct}=="0b37", MODE="0666", GROUP="plugdev"
SUBSYSTEMS=="usb", ENV{DEVTYPE}=="usb_device", ATTRS{idVendor}=="03e7", ATTRS{idProduct}=="2150", MODE="0666", GROUP="plugdev"KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0ad5", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor_custom", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0ad5", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0af2", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0af2", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0afe", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor_custom", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0afe", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0aff", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor_custom", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0aff", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b00", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor_custom", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b00", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b01", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor_custom", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b01", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b3a", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b3a", RUN+="/bin/sh -c ' chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b3d", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b3d", RUN+="/bin/sh -c ' chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b4b", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b4b", RUN+="/bin/sh -c ' chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b4d", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b4d", RUN+="/bin/sh -c ' chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b5b", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b5b", RUN+="/bin/sh -c ' chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b5c", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b5c", RUN+="/bin/sh -c ' chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
KERNEL=="iio*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b64", MODE:="0777", GROUP:="plugdev", RUN+="/bin/sh -c 'chmod -R 0777 /sys/%p'"
DRIVER=="hid_sensor*", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b64", RUN+="/bin/sh -c ' chmod -R 0777 /sys/%p && chmod 0777 /dev/%k'"
然后重启再运行
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.108 image:=/camera/color/image_raw
就可以了
ps:上述代码去掉了ros官方的camera参数才可以正常运行
小技巧
可以查看节点信息:

可以查找包的路径
rospack find package_name
reference
(已修正精度 1mm左右)Realsense d435i深度相机+Aruco+棋盘格+OpenCV手眼标定全过程记录_realsense精度-CSDN博客
aruco_ros安装easy_handeye安装_meiyou aruco_ros-CSDN博客