-
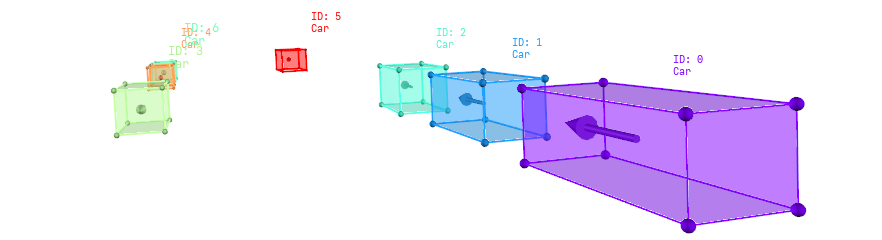
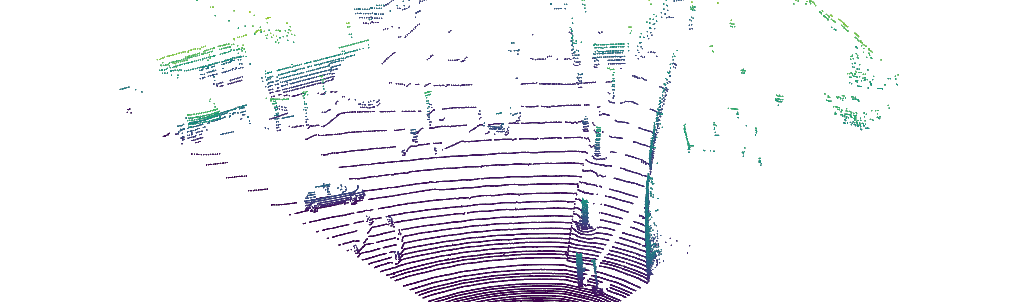
- 面向自动驾驶场景的 3D 目标检测+目标跟踪,基于kitti+waymo数据集的自动驾驶场景的3D目标检测+跟踪渲染可视化查看。
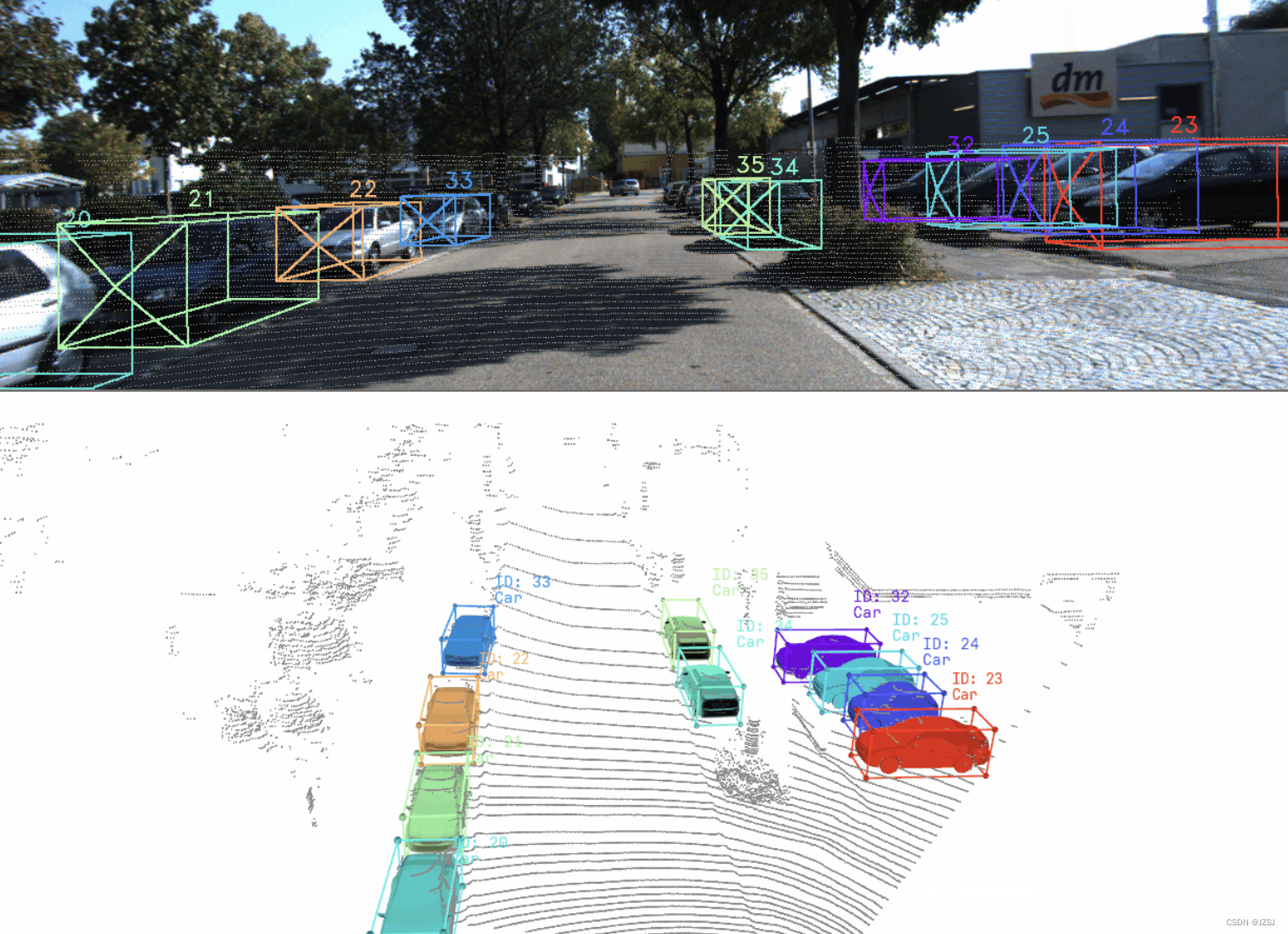

- 项目细节 ==> 具体参见项目
README.md
-
- (1) Kitti detection 数据集结构
# For Kitti Detection Dataset
└── kitti_detection├── testing | ├──calib| ├──image_2| ├──label_2| └──velodyne └── training├──calib├──image_2├──label_2└──velodyne
# For Kitti Tracking Dataset
└── kitti_tracking├── testing | ├──calib| | ├──0000.txt| | ├──....txt| | └──0028.txt| ├──image_02| | ├──0000| | ├──....| | └──0028| ├──label_02| | ├──0000.txt| | ├──....txt| | └──0028.txt| └──velodyne| ├──0000| ├──....| └──0028 └── training # the structure is same as testing set├──calib├──image_02├──label_02└──velodyne
pip install python3 \numpy==1.21.3 \vedo==2021.0.6 \vtk==9.0.3 \opencv==4.5.4.58 \matplotlib==3.4.3
from viewer.viewer import Viewer
import numpy as npvi = Viewer() # set box_type='OpenPCDet' if you use OpenPCDet boxes
len_dataset = 1000for i in range(len_dataset):pseudo_boxes = np.array([[i*0.05, -1, 1, 1, 1, 1, 0], [i*0.05, 1, 1, 1, 1, 1, 0]]) # your boxesids = np.array([0,1]) # your boxes ids (optional)pseudo_points = np.random.randn(100, 3) # your pointsvi.add_points(pseudo_points, radius=4, scatter_filed=pseudo_points[:, 0])vi.add_3D_boxes(pseudo_boxes, ids=ids,caption_size=(0.09,0.09))vi.add_spheres(pseudo_boxes[:, 0:3],radius=0.03,res=10,color='red',del_after_show=False, alpha=1) # Draw motion trackvi.show_3D() # press the Q or Enter or ESC key to view
-
- https://download.csdn.net/download/weixin_42405819/89093750