2.2服务通信

2.2.1服务通信理论模型
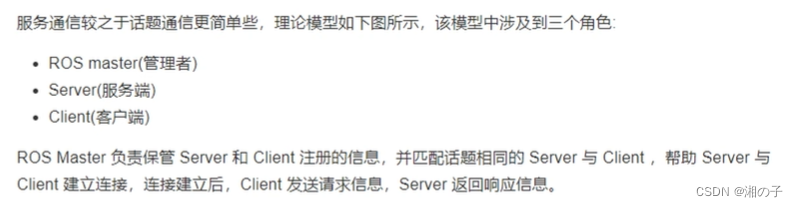
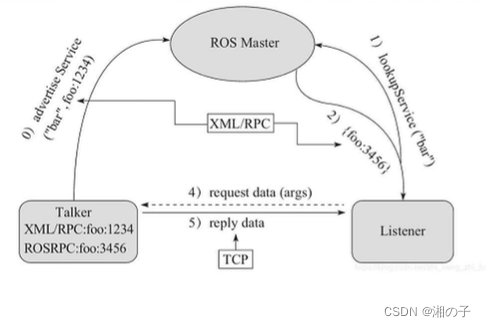
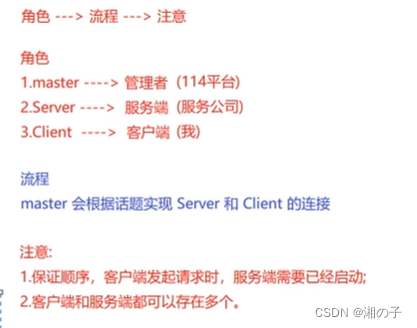
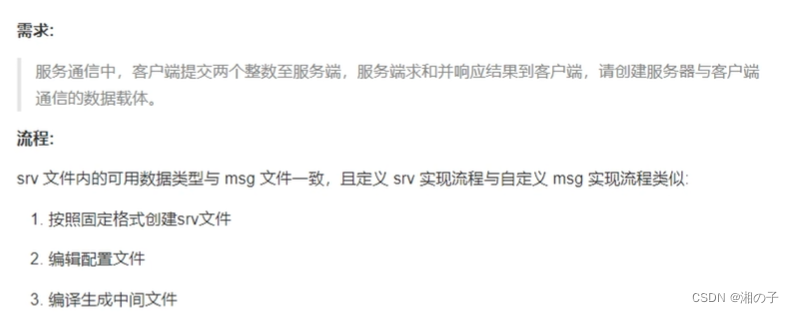
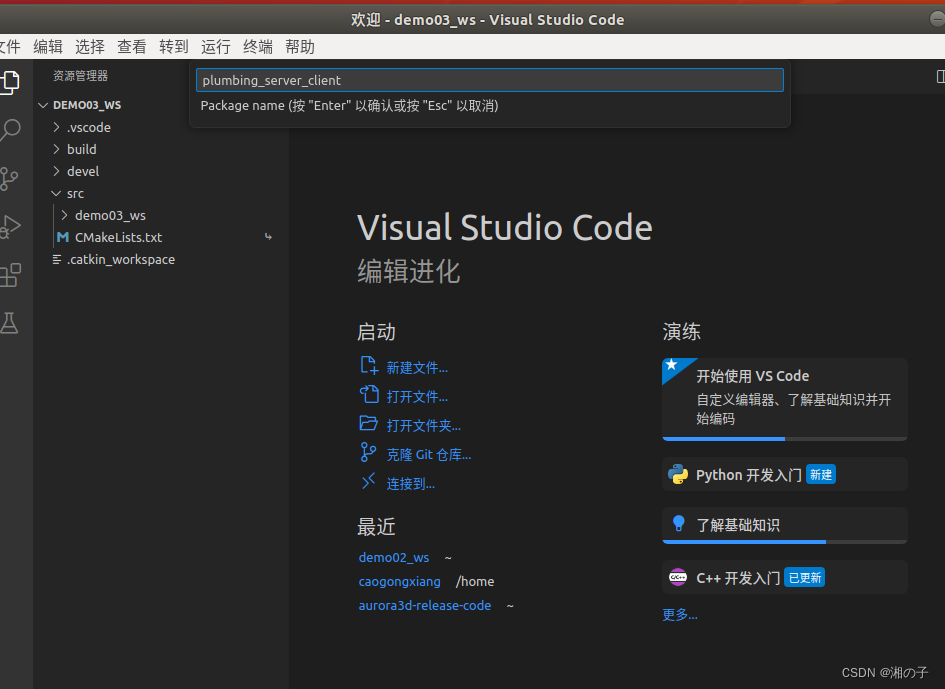
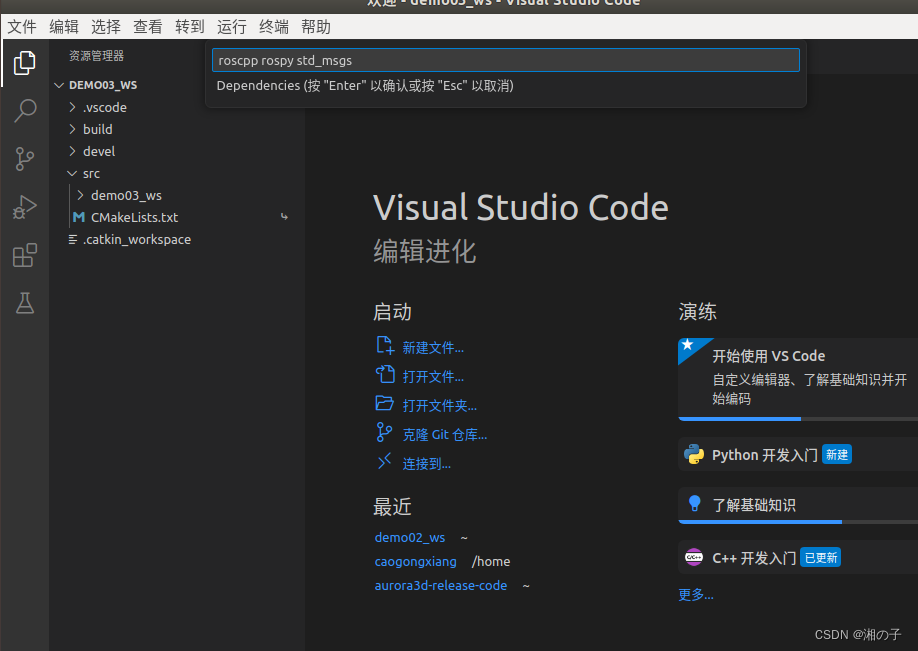
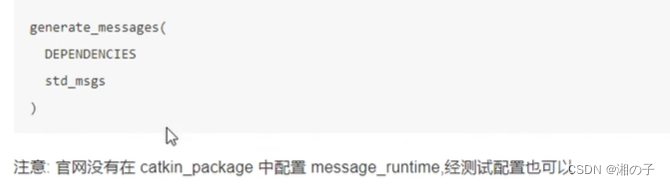
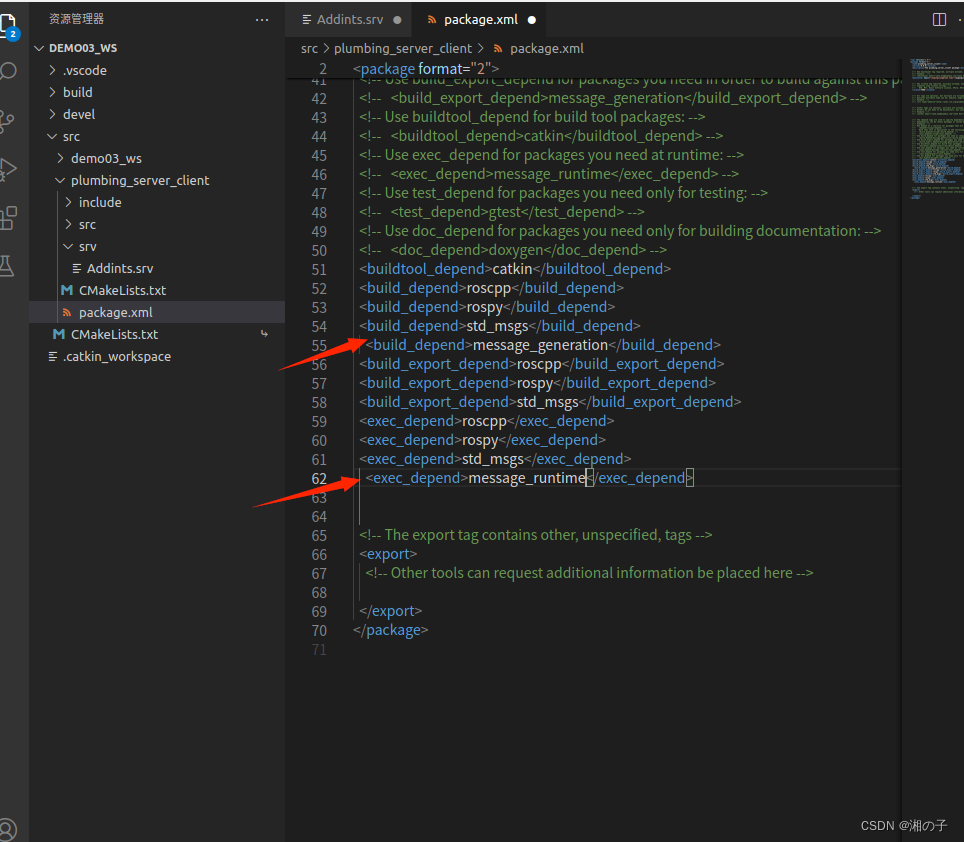
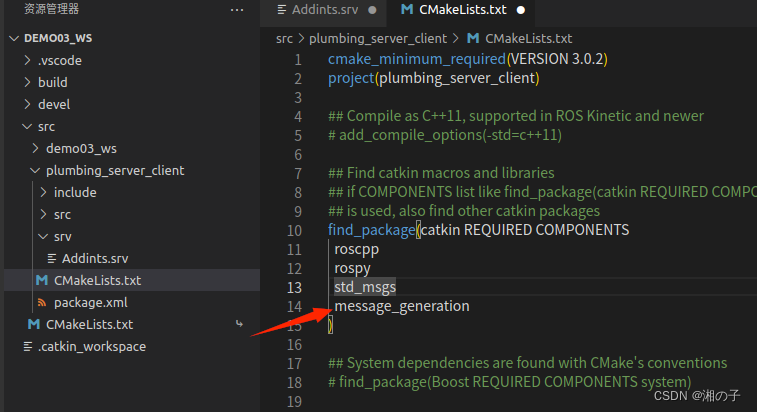
2.2.2服务通信自定义srv


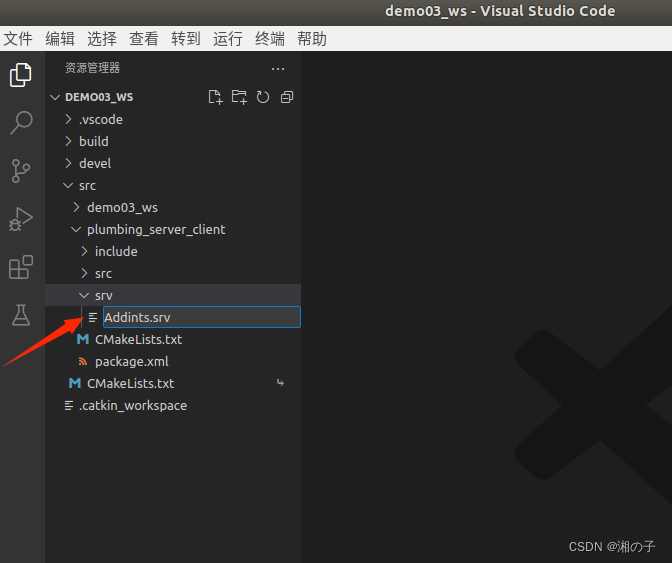
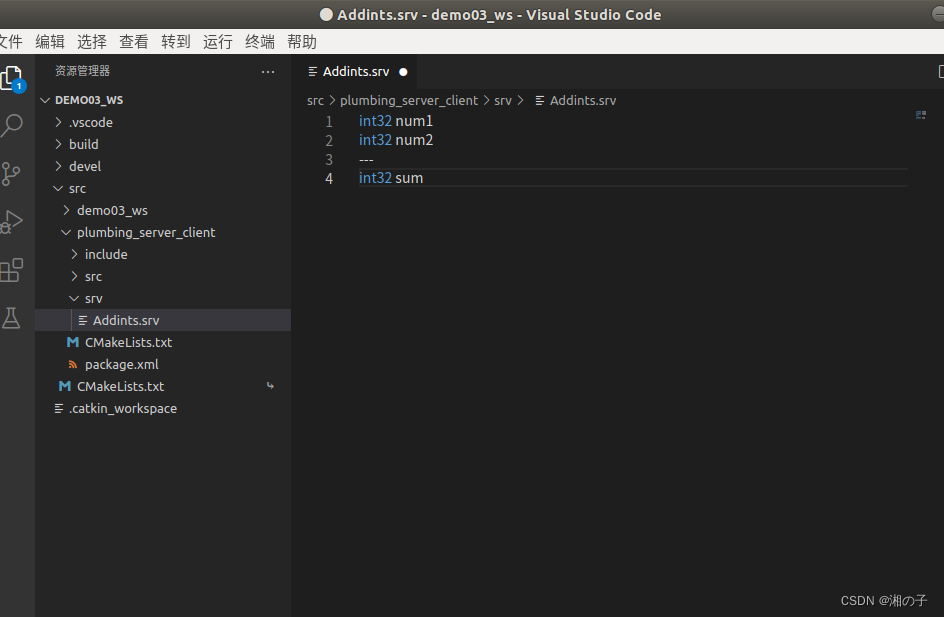

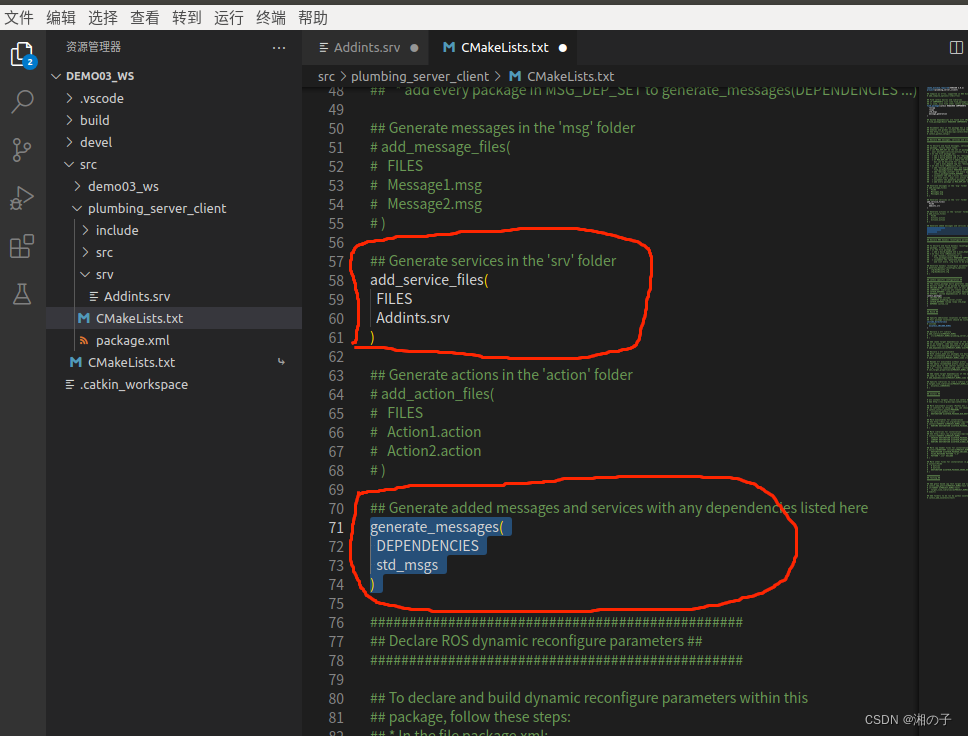
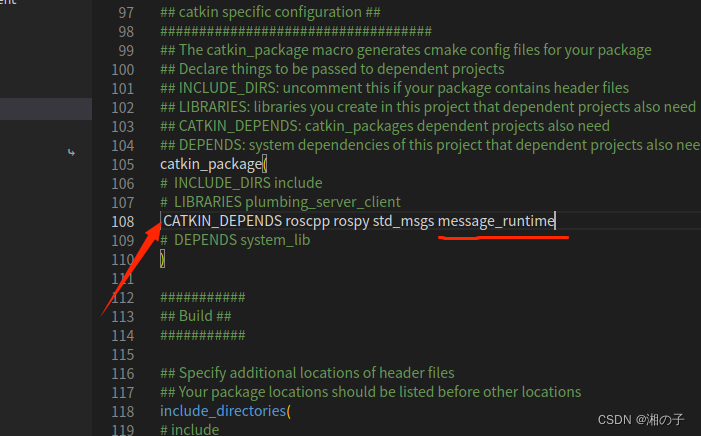

后续调用相关msg时,是从这些中间文件调用的
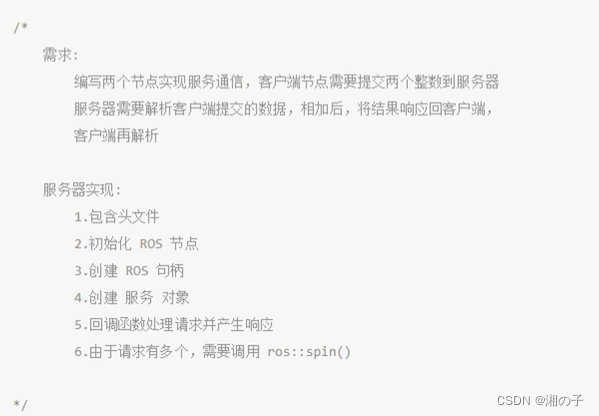
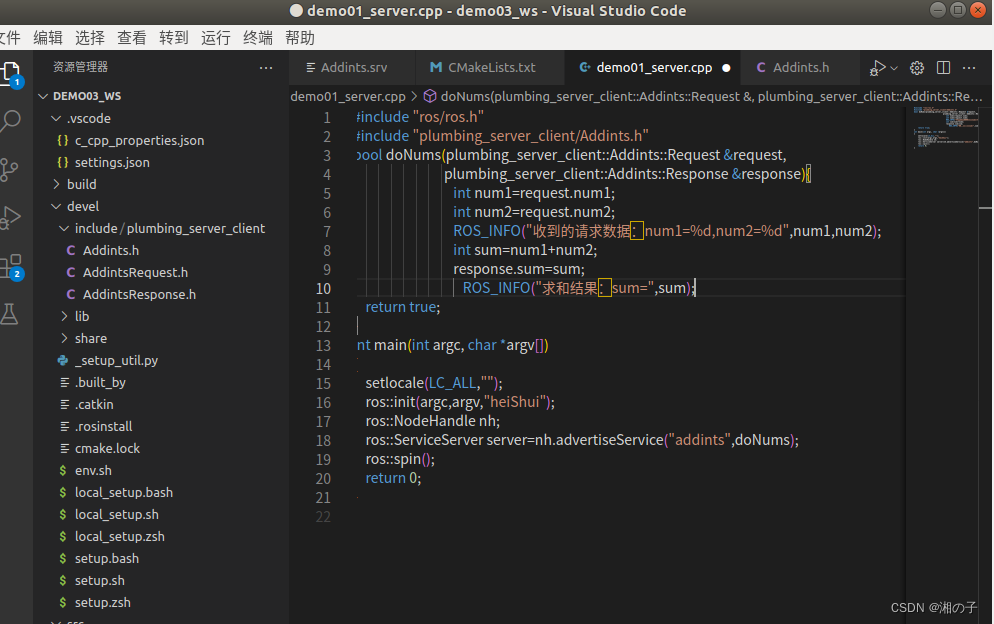
2.2.3服务通信自定义srv调用A(c++)




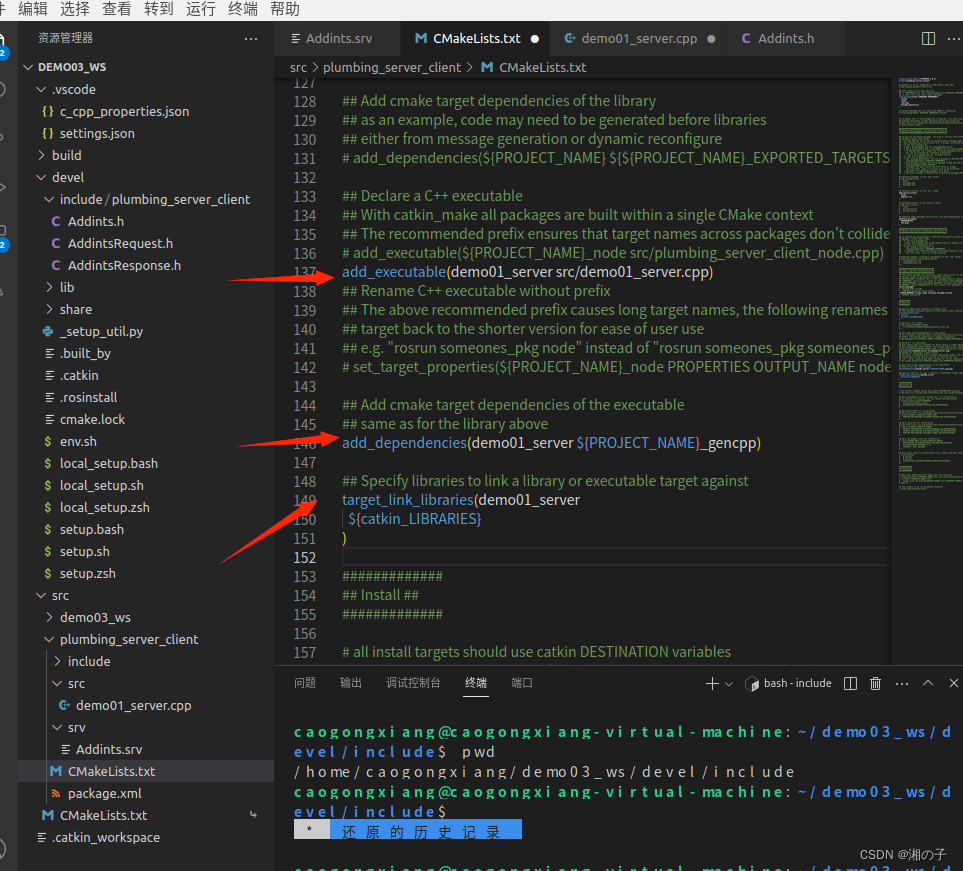
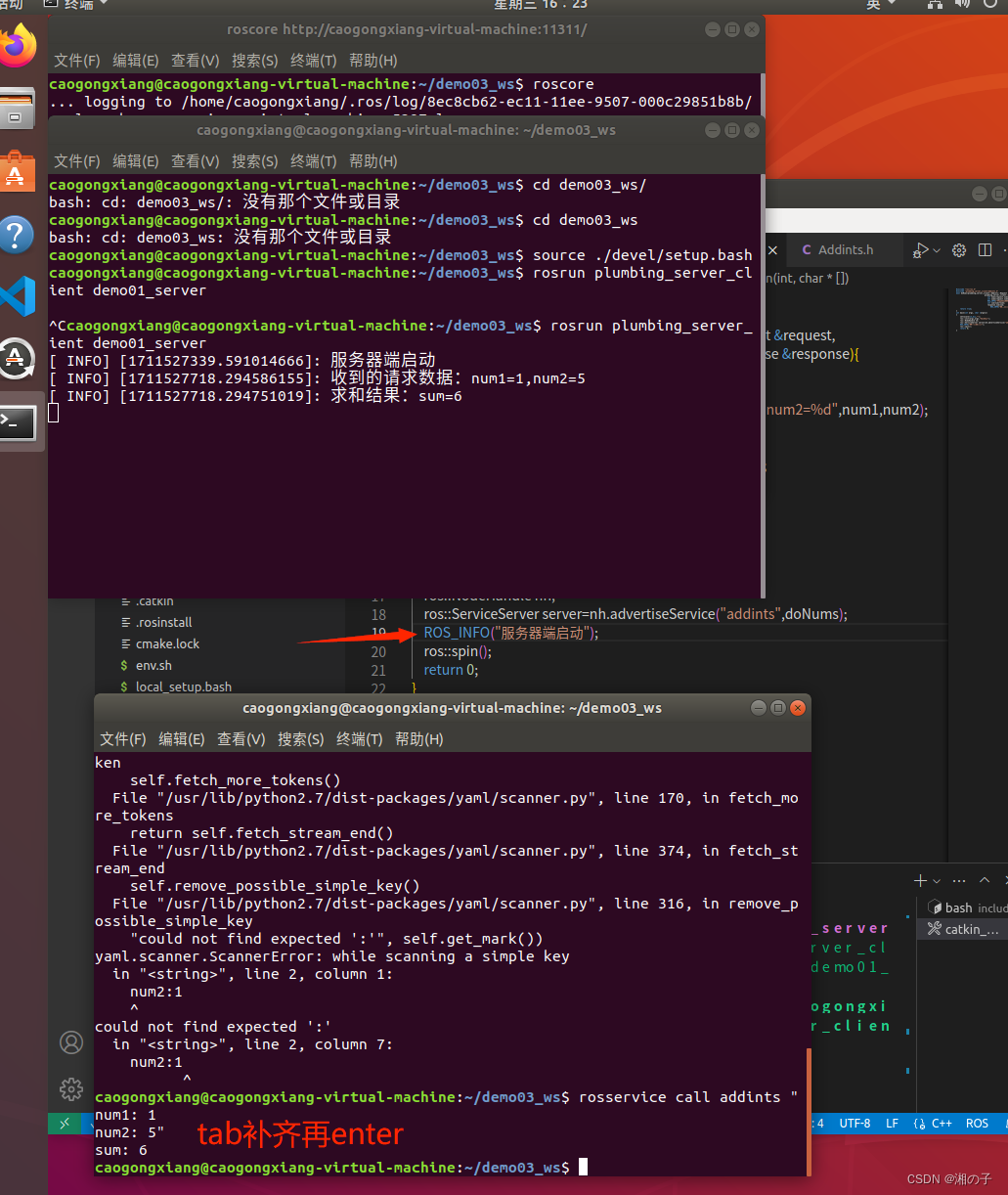
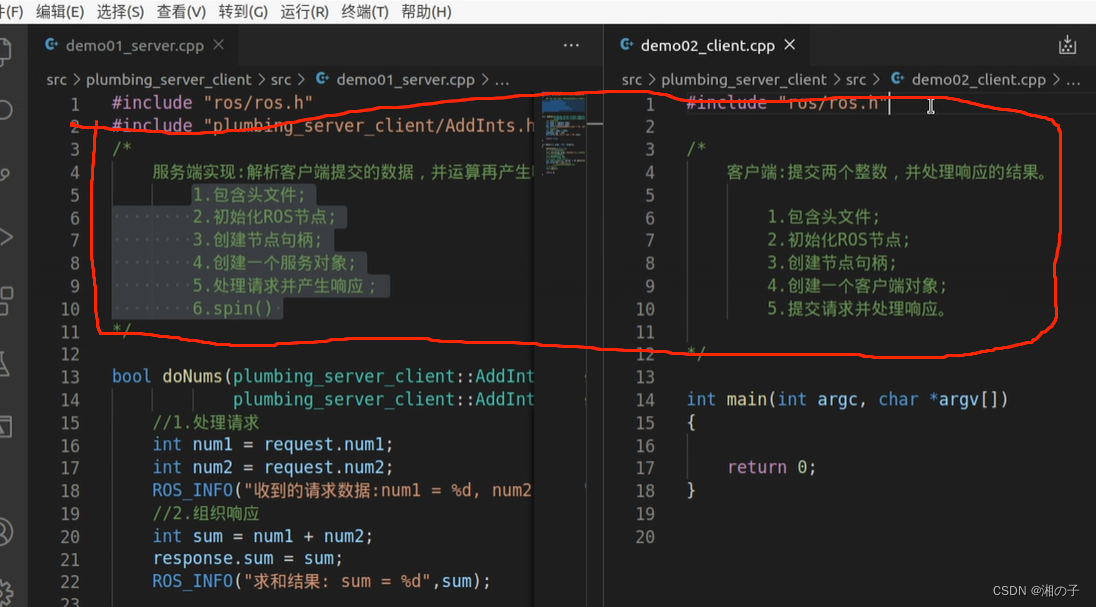
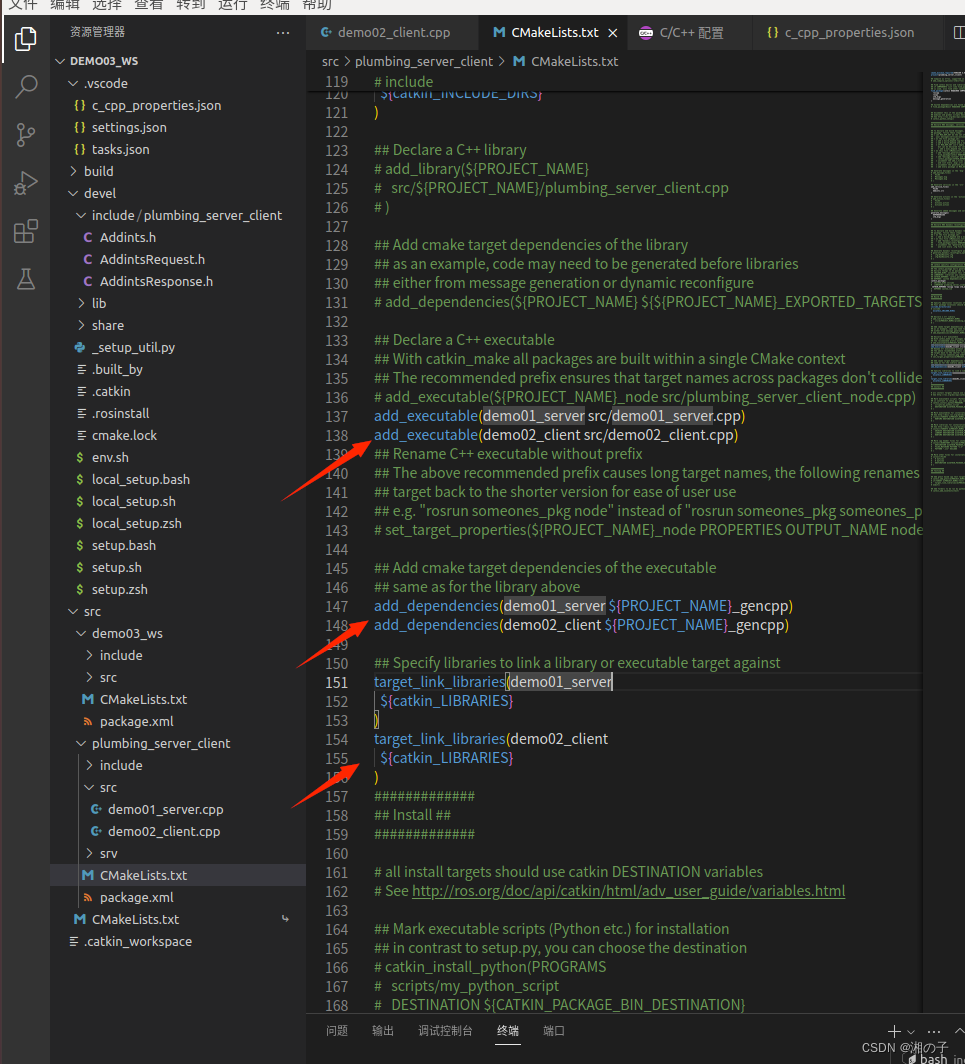
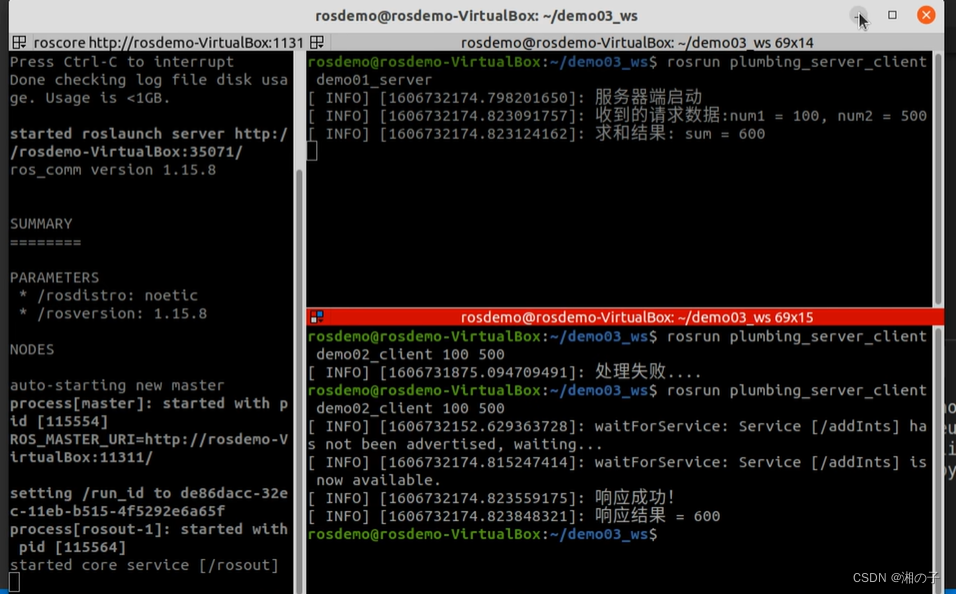
1.服务端
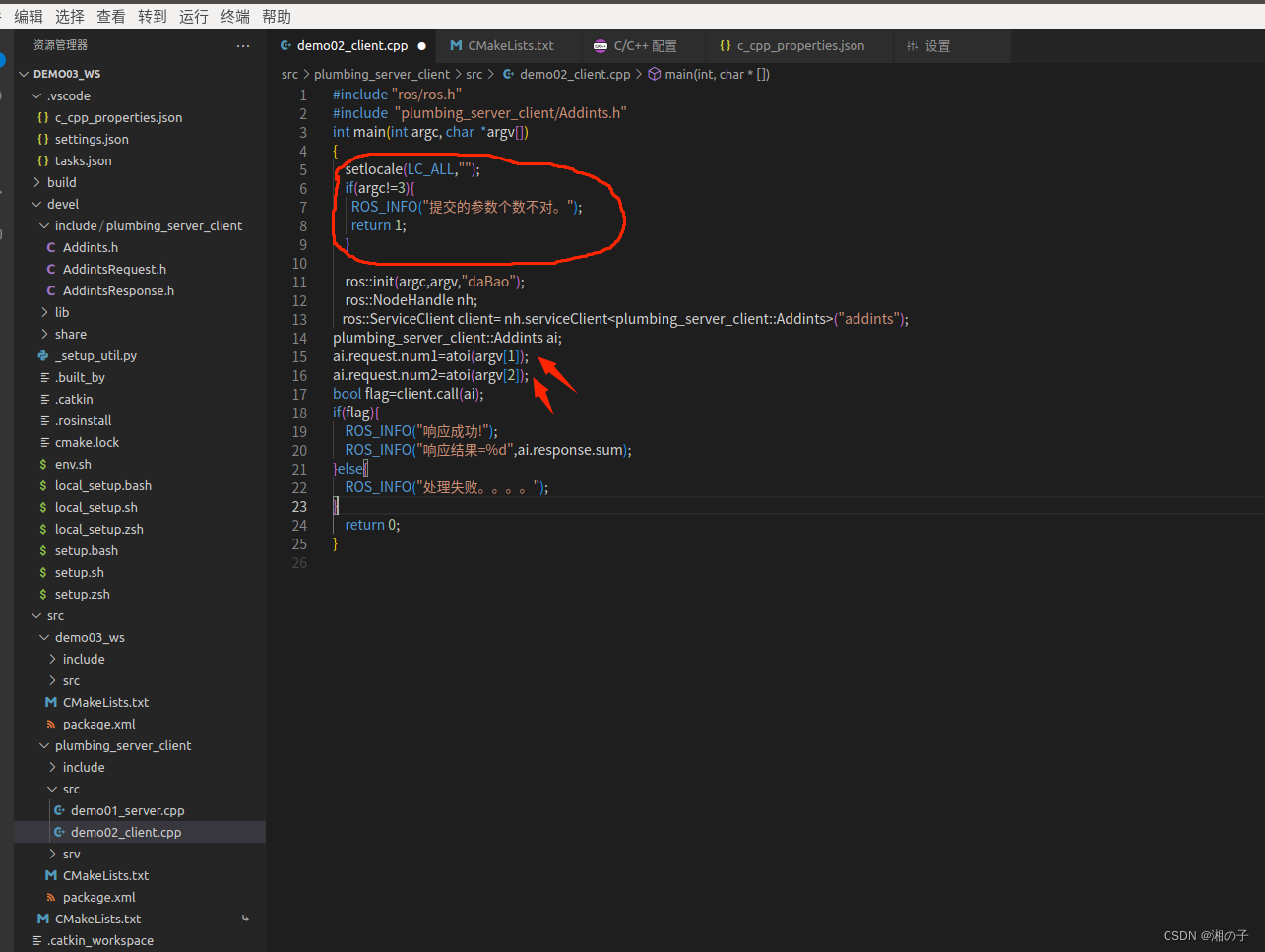
2.客户端

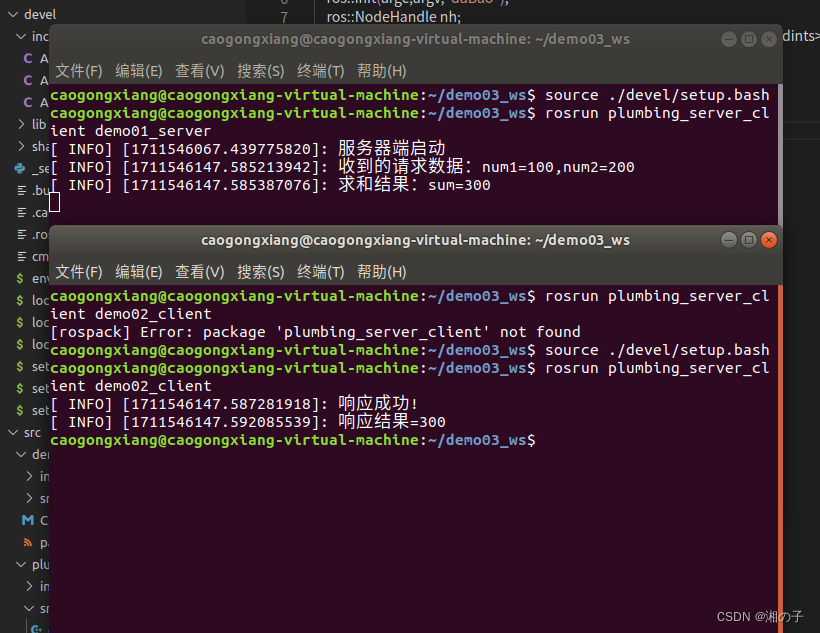
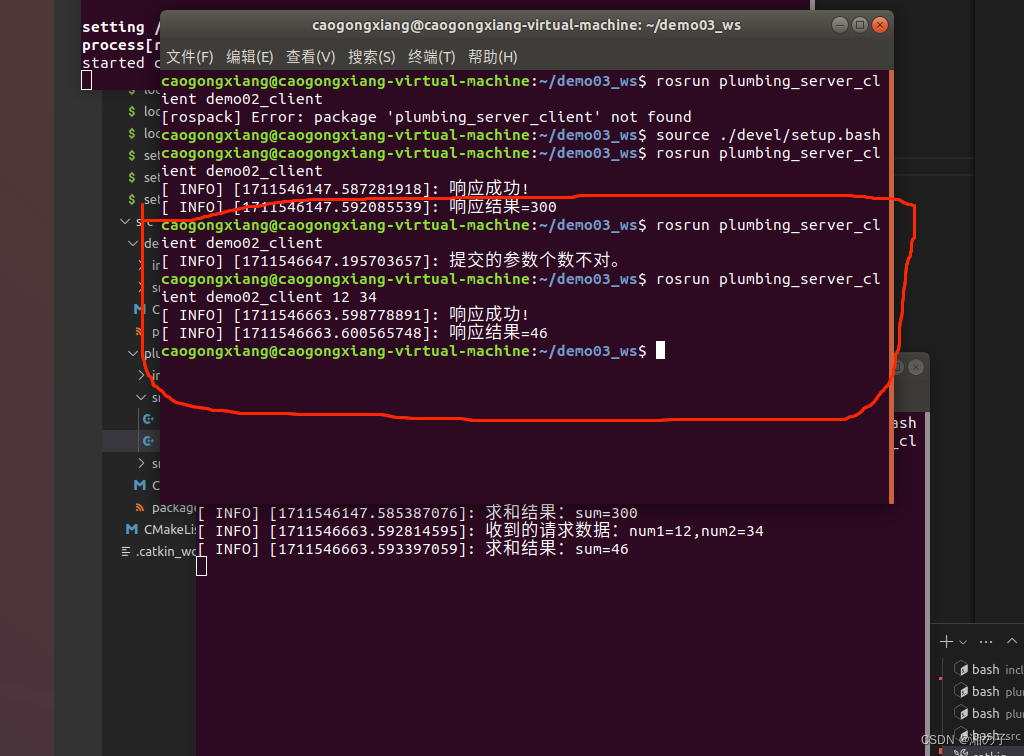
实现参数的动态提交
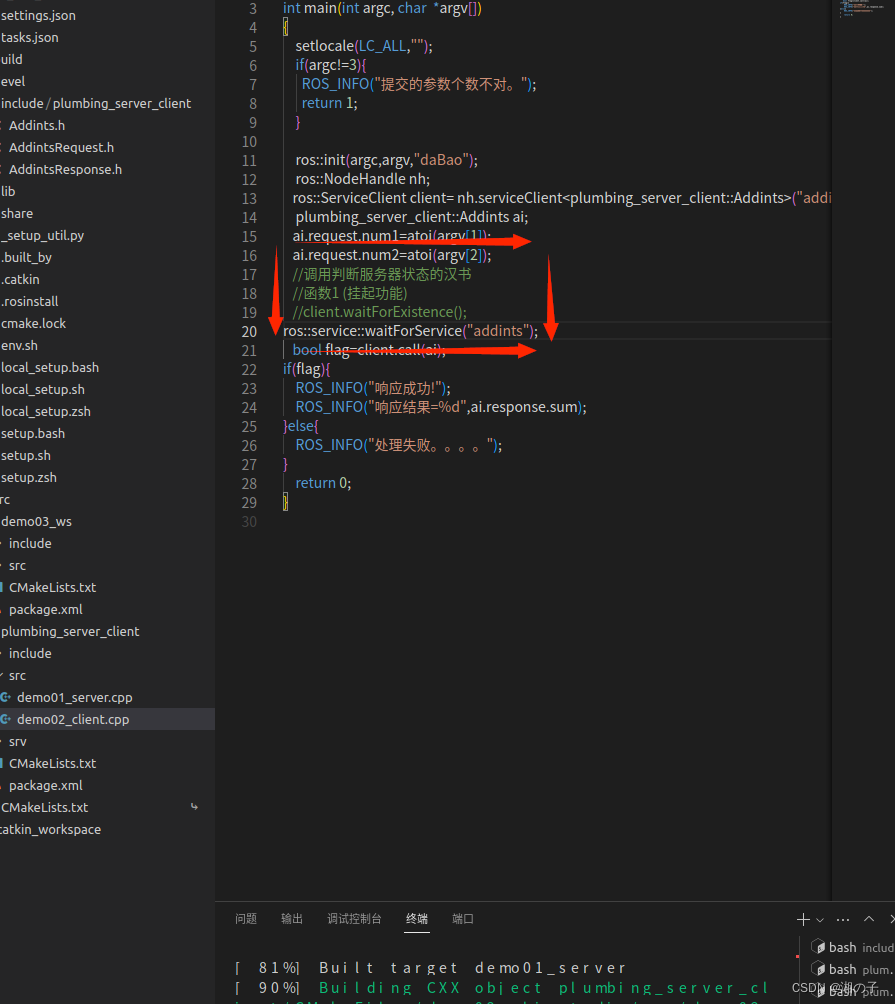
问题:如果先启动客户端,那么会请求异常
需求:如果先启动客户端,不要直接抛出异常,而是挂起,等服务器启动后,再正常请求
解决:在ROS中内置了相关函数,这些函数可以让客户端启动后挂起,等待服务器启动

2.2服务通信
2.2.1服务通信理论模型
2.2.2服务通信自定义srv
后续调用相关msg时,是从这些中间文件调用的
2.2.3服务通信自定义srv调用A(c++)
1.服务端
2.客户端
实现参数的动态提交
问题:如果先启动客户端,那么会请求异常
需求:如果先启动客户端,不要直接抛出异常,而是挂起,等服务器启动后,再正常请求
解决:在ROS中内置了相关函数,这些函数可以让客户端启动后挂起,等待服务器启动
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/600827.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!