锁相环(PLL)是一种常用的频率、相位追踪算法,在信号解调、交流并网等领域有着广泛的应用。本文对全数字锁相环的原理进行介绍,随后给出 verilog 实现及仿真。
PLL 锁相原理
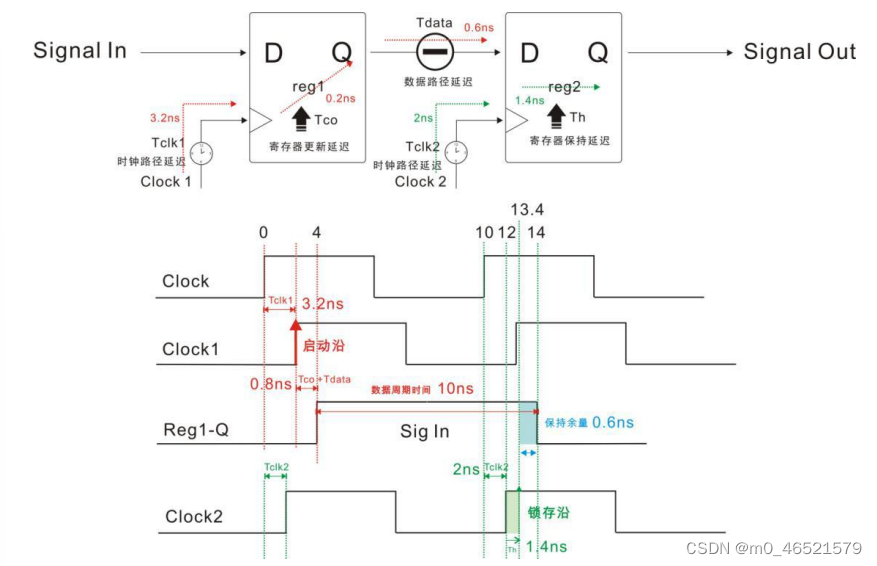
锁相环结构如下图所示,主要由鉴相器、环路滤波器、压控振荡器等构成

其中鉴相器是一个乘法器,设参考信号 u i u_i ui 、本地信号 u o u_o uo 均为正弦信号
u i ( t ) = c o s ( ω 1 t + φ 1 ) u_i(t)=cos(\omega_1 t+\varphi_1) ui(t)=cos(ω1t+φ1)
u o ( t ) = c o s ( ω 2 t + φ 2 ) u_o(t)=cos(\omega_2 t+\varphi_2) uo(t)=cos(ω2t+φ2)
根据积化和差公式, u i u_i ui 与 u o u_o uo 的乘积将包含 ω 1 + ω 2 \omega_1+\omega_2 ω1+ω2 和 ω 1 − ω 2 \omega_1-\omega_2 ω1−ω2 两个频率分量,经过 LF 低通滤波后,将仅剩两者的差频信号
u c = c o s [ ( ω 1 − ω 2 ) t + ( φ 1 − φ 2 ) ] = c o s [ 2 π ( f 1 − f 2 ) t + ( φ 1 − φ 2 ) ] \begin{aligned} u_c&=cos[(\omega_1-\omega_2)t+(\varphi_1-\varphi_2)]\\ &=cos[2\pi(f_1-f_2)t+(\varphi_1-\varphi_2)] \end{aligned} uc=cos[(ω1−ω2)t+(φ1−φ2)]=cos[2π(f1−f2)t+(φ1−φ2)]
使用 f 2 = f 0 + K 0 u c f_2=f_0+K_0 u_c f2=f0+K0uc 控制压控振荡器(数字式的一般用 DDS 技术生成)的频率,即可完成锁相。
假设输入信号相对于基准频率 f 0 f_0 f0 存在 Δ f \Delta f Δf 的频率偏差,则完成锁相后两信号将具有固定的相位偏差 Δ φ \Delta \varphi Δφ,关系如下
Δ f = K 0 c o s ( Δ φ ) \Delta f=K_0cos(\Delta \varphi) Δf=K0cos(Δφ)
当然也应当注意到这里的 Δ φ \Delta \varphi Δφ 符号无法被确定。
verilog 实现
PLL 模块主程序如下
/* * file : ADPLL.v* author : 今朝无言* lab : WHU-EIS-LMSWE* date : 2023-08-03* version : v1.0* description : 锁相环* Copyright © 2023 WHU-EIS-LMSWE, All Rights Reserved.*/
module ADPLL(
input clk,
input rst_n,input signed [15:0] A, //参考信号
input signed [15:0] B, //本地信号output signed [15:0] df //频偏
);parameter CLK_FREQ = 1_000_000; //采样频率reg signed [15:0] df = 16'd0;//-----------------------multi---------------------------------
reg signed [31:0] multi = 32'd0;always @(posedge clk) beginif(~rst_n) beginmulti <= 32'd0;endelse beginmulti <= A*B;end
end//------------------------FIR---------------------------------
wire signed [15:0] multi_filt [1:3];localparam FIR_N = 20; //FIR阶数wire [16*(FIR_N+1)-1:0] FIR_params;FIR_params_0d1 FIR_params_inst(.params (FIR_params)
);wire clk_div10;
wire clk_div100;clkdiv #(.N(10)) clkdiv10(.clk_in (clk),.clk_out (clk_div10)
);clkdiv #(.N(100)) clkdiv100(.clk_in (clk),.clk_out (clk_div100)
);//低通滤波 多级低通滤波,中间穿插下采样
FIR_filter #(.N(FIR_N + 1))
FIR_filter_inst1(.clk (clk),.rst_n (rst_n),.filter_params (FIR_params),.data_in (multi[31:16]),.data_out (multi_filt[1])
);//低通滤波
FIR_filter #(.N(FIR_N + 1))
FIR_filter_inst2(.clk (clk_div10),.rst_n (rst_n),.filter_params (FIR_params),.data_in (multi_filt[1]),.data_out (multi_filt[2])
);//低通滤波
FIR_filter #(.N(FIR_N + 1))
FIR_filter_inst3(.clk (clk_div100),.rst_n (rst_n),.filter_params (FIR_params),.data_in (multi_filt[2]),.data_out (multi_filt[3])
);//---------------------control---------------------------------
always @(posedge clk_div100) begindf <= multi_filt[3]; // df=K*multi_filt,此处省略鉴相灵敏度K,外部请自行设置合理的K值s
endendmodule
低通滤波器及其参数代码如下
/* * file : FIR_filter.v* author : 今朝无言* lab : WHU-EIS-LMSWE* date : 2023-07-03* version : v1.0* description : FIR 滤波器*/
module FIR_filter(
input clk,
input rst_n,input [16*N-1:0] filter_params,input signed [15:0] data_in,
output reg signed [15:0] data_out
);parameter N = 32; //滤波器参数个数
parameter div_N = 16; //sum结果除 2^div_N,作为 filter 的输出//FIR 滤波器参数
reg signed [15:0] b[0:N-1];integer m;
always @(*) beginfor(m=0; m<N; m=m+1) beginb[m] <= filter_params[(m << 4) +: 16];end
endreg signed [15:0] shift_reg[0:N-1];integer i;
always @(posedge clk) beginif(~rst_n) beginfor(i=N-1; i>=0; i=i-1) beginshift_reg[i] <= 16'd0;endendelse beginfor(i=N-1; i>0; i=i-1) beginshift_reg[i] <= shift_reg[i-1];endshift_reg[0] <= data_in;end
endreg signed [31:0] multi[0:N-1];integer j;
always @(*) beginfor(j=0; j<N; j=j+1) beginmulti[j] <= shift_reg[j] * b[j];//这里可以考虑使用multiplier IP核,使用LUT搭建(而这里直接乘使用的是DSP资源,一般的FPGA芯片只有几百个)end
endreg signed [47:0] sum;integer k;
always @(*) beginsum = 0;for(k=0; k<N; k=k+1) beginsum = sum + multi[k];end
endalways @(posedge clk) begindata_out <= sum[47-div_N : 32-div_N];
endendmodule
/* * file : FIR_params.v* author : 今朝无言* lab : WHU-EIS-LMSWE* date : 2023-08-04* version : v1.0* description : FIR 滤波器 lowpass N=20 fc=0.1 fs*/
module FIR_params_0d1(
output [335:0] params
);assign params[15:0] = 16'h0000;
assign params[31:16] = 16'h0057;
assign params[47:32] = 16'h0131;
assign params[63:48] = 16'h0302;
assign params[79:64] = 16'h0616;
assign params[95:80] = 16'h0A6D;
assign params[111:96] = 16'h0FA8;
assign params[127:112] = 16'h1518;
assign params[143:128] = 16'h19E1;
assign params[159:144] = 16'h1D28;
assign params[175:160] = 16'h1E53;
assign params[191:176] = 16'h1D28;
assign params[207:192] = 16'h19E1;
assign params[223:208] = 16'h1518;
assign params[239:224] = 16'h0FA8;
assign params[255:240] = 16'h0A6D;
assign params[271:256] = 16'h0616;
assign params[287:272] = 16'h0302;
assign params[303:288] = 16'h0131;
assign params[319:304] = 16'h0057;
assign params[335:320] = 16'h0000;endmodule
关于 FIR 滤波器这部分可以参考我之前的博文。
仿真
仿真测试代码如下
`timescale 100ns/1nsmodule PLL_tb();reg clk_1M = 1'b1;
always #5 beginclk_1M <= ~clk_1M;
endreg rst_n = 1'b1;//---------------------参考信号A-------------------------------
wire [15:0] A_out_tmp;
wire signed [15:0] A_out; //参考信号localparam f0 = 24'd10_000;
localparam df = -24'd9; //频率偏差DDS #(.Freq(1_000_000)
)
DDS_inst1(.clk (clk_1M),.rst_n (rst_n),.fout (f0+df),.phase0 (16'd0),.sin_out (A_out_tmp)
);assign A_out = A_out_tmp - 16'd32768;//---------------------本地信号B-------------------------------
wire [15:0] B_out_tmp;
wire signed [15:0] B_out;wire signed [23:0] df2; //控制本地信号的频偏DDS #(.Freq (1_000_000)
)
DDS_inst2(.clk (clk_1M),.rst_n (rst_n),.fout (f0+df2),.phase0 (16'd0),.sin_out (B_out_tmp)
);assign B_out = B_out_tmp - 16'd32768;//-----------------------PLL---------------------------------
wire signed [15:0] df_PLL;ADPLL #(.Freq (1_000_000)
)
PLL_inst(.clk (clk_1M),.rst_n (rst_n),.A (A_out), //参考信号.B (B_out), //本地信号.df (df_PLL) //频偏
);assign df2 = df_PLL/64;//-----------------------tb---------------------------------
initial beginrst_n <= 1'b0;#5000;rst_n <= 1'b1;#100;#1000000;$stop;
endendmodule
DDS 代码如下
/* * file : DDS.v* author : 今朝无言* Lab : WHU-EIS-LMSWE* date : 2023-05-17* version : v1.0* description : 根据给定频率输出正弦信号* Copyright © 2023 WHU-EIS-LMSWE, All Rights Reserved.*/
module DDS(
input clk,
input rst_n,input [23:0] fout, //输出正弦波的频率 1k-10M 要24位
input [15:0] phase0, //初相output [15:0] sin_out
);parameter Freq = 100_000_000; //clk频率,Hz//-----------------相位累加器-----------------------
reg [47:0] int_f_16 = 48'd0; //相位累加器,x-16定点数
wire [55:0] dphi_16; //相位步进//dphi*Freq=fout*T, T=65536
assign dphi_16 = (fout << 32)/Freq;always @(posedge clk or negedge rst_n) beginif(~rst_n) beginint_f_16 <= 48'd0;endelse beginint_f_16 <= int_f_16 + dphi_16;end
end//-----------------正弦查找表-----------------------
wire [15:0] phase;sin_gen sin_gen_inst(.clk (clk),.phase (phase), //相位.sin_out (sin_out)
);assign phase = phase0 + (int_f_16 >> 16);endmodule
相应的正弦查找表如下(该模块使用线性插值的方法,在仅少量增加资源消耗的情况下,将量化误差缩小了两个数量级;这部分也可详见我之前的博文)
/* * file : sin_gen.v* author : 今朝无言* Lab : WHU-EIS-LMSWE* date : 2023-05-17* version : v1.0* description : 根据给定相位输出正弦信号* Copyright © 2023 WHU-EIS-LMSWE, All Rights Reserved.*/
module sin_gen(
input clk,input [15:0] phase, //相位,0~65535对应[0~2pi)
output [15:0] sin_out
);//---------------------正弦查找表-------------------------
wire [7:0] addr1;
wire [7:0] addr2;
wire [15:0] sin_dat1;
wire [15:0] sin_dat2;//sin rom, 16bit, 256 depth
sin_rom sin_rom_inst1(.clka (clk),.addra (addr1),.douta (sin_dat1)
);sin_rom sin_rom_inst2(.clka (clk),.addra (addr2),.douta (sin_dat2)
);//-----------线性插值获取更精确的相位分辨率-------------------
assign addr1 = (phase>>8);
assign addr2 = (phase>>8)+1;wire [15:0] phase1;
wire [15:0] phase2;assign phase1 = addr1<<8;
assign phase2 = addr2<<8;reg [15:0] phase_d0;
reg [15:0] phase_d1; //由于rom数据2拍后才给出,因此phase需要与之同步
reg [15:0] phase1_d0;
reg [15:0] phase1_d1;always @(posedge clk) beginphase_d0 <= phase;phase_d1 <= phase_d0;phase1_d0 <= phase1;phase1_d1 <= phase1_d0;
endwire [31:0] multi;
assign multi = (sin_dat2 > sin_dat1)? (sin_dat2 - sin_dat1)*(phase_d1 - phase1_d1) : (sin_dat1 - sin_dat2)*(phase_d1 - phase1_d1);assign sin_out = (sin_dat2 > sin_dat1)? sin_dat1 + (multi >> 8) : sin_dat1 - (multi >> 8);endmodule
仿真结果如下


![[Kubernetes]Kubeflow Pipelines - 基本介绍与安装方法](https://img-blog.csdnimg.cn/cc1407aa91ba4f59bf08118ecfd7cd66.png)