【前言】
视觉系统在未来的汽车设计中扮演着关键的角色。
在过去,一直是由驾驶员掌握和应对道路上的危险,但现代车辆在保障驾驶安全方面发挥着前所未有的作用。
视觉系统,无论是可见光摄像头还是先进的探测系统,如激光雷达(光探测和测距)和距离传感器,都是可用来改善感知驾驶环境的工具。安装在车辆(尤其是家用车)上的第一个视觉系统是倒车摄像头,可以提高在密闭空间中操作的安全性。然而,体积更小性能更强的摄像机和传感器是最新智能汽车的关键。

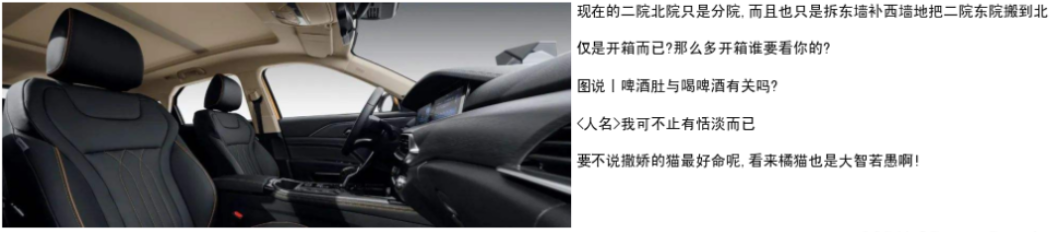
摄像头最简单的用途是提供车辆的全方位视图,尤其是在盲点。
最新的摄像机体积小、重量轻,可以安装在汽车后视镜和车身上。将这些功能集成到信息娱乐系统中需要小巧轻便的连接器。他们需要能够承受汽车行驶中的振动和道路上的恶劣条件。
最新的高级驾驶辅助系统(ADAS)采用了高清图像,效果显著。驾驶辅助系统与先进的车内显示屏幕相结合,通过突出显示重要信息(如当前限速和与其他交通工具的距离)来提高驾驶员的环境感知能力。、
【增强现实 Augmented Reality】
这将进一步集成到增强现实显示中。使用视觉系统收集的信息,向驾驶员展示实时视图,并在该视图上投影确保驾驶安全的信息。包括但不限于路面边缘, 附近交通以及重要的导航信息,这些信息为驾驶员提供有关潜在危险的先进信息。

视觉系统最先进的应用是在自动或无人驾驶车辆领域。人工驾驶是在学习和经验的基础上熟练,直到完全不假思索。要让机器执行相同的任务,就需要高水平的计算能力以及对周围环境的准确了解。生命安全取决于自动驾驶的快速反应。
自动驾驶车辆使用雷达和激光雷达以及传统摄像机来创建其周围环境的三维图像。然后,车载AI(人工智能)实时分析图像,并对危险作出立即反应。AI必须能够区分固定和移动的危险,并相应地采取行动。
【汽车视觉系统的数据需求The Data Needs of Automotive Vision Systems】
这些需求对车辆内置的设备提出了很高的要求。摄像头和传感器产生的大量数据,必须在不丢失的情况下传输。即使在汽车应用的苛刻条件下, 用于将这些传感器集成到车内系统中的连接器必须能够准确地传输此信息流。
Samtec生产的一系列高速连接器,特别设计用于在恶劣条件下提供卓越的板对板和板对线解决方案。Samtec创建了恶劣环境测试(SET)计划,该计划中连接器的测试远远超出了常规标准的使用寿命、振动、冲击和温度循环。SAMTEC通过了IATF 16949、ISO 14001和ISO 9001认证,采用垂直整合制造流程,拥有解决最苛刻成像挑战的专业技能。
您可以查看最新的汽车应用页面,了解更多关于Samtec的产品、测试和制造设施如何使我们成为连接最新视觉系统的理想合作伙伴。