💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
稀疏感知图像和体数据恢复是一种用于恢复损坏、噪声或不完整的图像和体数据的技术。它利用了信号的稀疏性,即信号在某种基础下可以用较少的非零系数表示,从而实现高质量的恢复。
在进行稀疏感知图像和体数据恢复的研究时,需要定义一些系统对象。这些对象描述了系统中的各个组成部分和它们之间的关系,有助于实现恢复算法的设计和实现。
系统对象的定义包括以下几个方面:
1. 输入数据对象:这个对象描述了输入的损坏、噪声或不完整的图像或体数据。它可以是一个图像矩阵、一个体数据的三维数组或其他适当的数据结构。
2. 稀疏表示对象:这个对象描述了信号的稀疏表示。它可以是一个稀疏矩阵、一个稀疏系数向量或其他适当的数据结构。稀疏表示对象是恢复算法的关键部分,它通过选择适当的基础和优化方法来实现信号的稀疏表示。
3. 恢复算法对象:这个对象描述了用于恢复稀疏感知图像和体数据的算法。它可以是一个迭代算法、一个优化算法或其他适当的算法。恢复算法对象通常包括对输入数据对象和稀疏表示对象的处理步骤,以及对恢复结果的评估和优化步骤。
4. 输出数据对象:这个对象描述了恢复后的图像或体数据。它可以是一个恢复后的图像矩阵、一个恢复后的体数据的三维数组或其他适当的数据结构。
通过定义这些系统对象,研究人员可以更好地理解稀疏感知图像和体数据恢复的过程,并设计出高效、准确的恢复算法。这些系统对象的定义还可以为稀疏感知图像和体数据恢复的实际应用提供指导,例如医学图像处理、计算机视觉和图像压缩等领域。
📚2 运行结果

 部分代码:
部分代码:
%% Create a step monitor system object
% ISTA iteratively approaches to the optimum solution. In order to
% observe the intermediate results, the following class can be used:
%
% * saivdr.utility.StepMonitoringSystem% Parameters for StepMonitoringSystem
isverbose = true; % Verbose mode
isvisible = true; % Monitor intermediate results
hfig2 = figure(2); % Figure to show the source, observed and result image
hfig2.Name = 'ISTA-based Image Restoration';% Instantiation of StepMonitoringSystem
import saivdr.utility.StepMonitoringSystem
stepmonitor = StepMonitoringSystem(...'DataType', 'Image',...'SourceImage', orgImg,... % Original image'ObservedImage', obsImg,... % Observed image'IsMSE', false,... % Switch for MSE evaluation'IsPSNR', true,... % Switch for PSNR evaluation'IsSSIM', false,... % Switch for SSIM evaluation'IsVerbose', isverbose,... % Switch for verbose mode'IsVisible', isvisible,... % Switch for display intermediate result'ImageFigureHandle',hfig2); % Figure handle% Set the object to the ISTA system object
ista.StepMonitor = stepmonitor;%% Perform ISTA-based image restoration
% STEP method of IstaImRestoration system object, _ista_ , executes
% the ISTA-based image restoration to deblur the observed image.
% As the result, a restored image
%
% $\hat{\mathbf{u}} = \mathbf{D}\hat{\mathbf{y}}$
%
% is obtained.fprintf('\n ISTA')
resImg = ista.step(obsImg); % STEP method of IstaImRestoration%% Extract the final evaluation
% The object of StepMonitoringSystem, _stepmonitor_ , stores the
% evaluation values calculated iteratively in ISTA as a vector. The GET
% method of _stepmonitor_ can be used to extract the number of iterations
% and the sequence of PSNRs. nItr = stepmonitor.nItr;
psnrs = stepmonitor.PSNRs;
psnr_ista = psnrs(nItr);%% Perform Wiener filtering
% As a reference, let us show a result of Wiener filter.% Create a step monitor system object for the PSNR evaluation
stepmonitor = StepMonitoringSystem(...'SourceImage',orgImg,...'MaxIter', 1,...'IsMSE', false,...'IsPSNR', true,...'IsSSIM', false,...'IsVisible', false,...'IsVerbose', isverbose);% Use the same blur kernel as that applied to the observed image, obsImg
blurKernel = blur.BlurKernel;% Estimation of noise to signal ratio
nsr = noise_var/var(orgImg(:));% Wiener filter deconvolution of Image Processing Toolbox
wnfImg = deconvwnr(obsImg, blurKernel, nsr);% Evaluation
fprintf('\n Wiener')
psnr_wfdc = stepmonitor.step(wnfImg); % STEP method of StepMonitoringSystem%% Compare deblurring performances
% In order to compare the deblurring performances between two methods,
% ISTA-based deblurring with NSOLT and Wiener filter, let us show
% the original, observed and two results in one figure together.hfig3 = figure(3);% Original image x
subplot(2,2,1)
imshow(orgImg)
title('Original image {\bf u}')% Observed image u
subplot(2,2,2)
imshow(obsImg)
title('Observed image {\bf x}')% Result u^ of ISTA
subplot(2,2,3)
imshow(resImg)
title(['{\bf u}\^ by ISTA : ' num2str(psnr_ista) ' [dB]'])% Result u^ of Wiener filter
subplot(2,2,4)
imshow(wnfImg)
title(['{\bf u}\^ by Wiener: ' num2str(psnr_wfdc) ' [dB]'])
%% Create a step monitor system object
% ISTA iteratively approaches to the optimum solution. In order to
% observe the intermediate results, the following class can be used:
%
% * saivdr.utility.StepMonitoringSystem
% Parameters for StepMonitoringSystem
isverbose = true; % Verbose mode
isvisible = true; % Monitor intermediate results
hfig2 = figure(2); % Figure to show the source, observed and result image
hfig2.Name = 'ISTA-based Image Restoration';
% Instantiation of StepMonitoringSystem
import saivdr.utility.StepMonitoringSystem
stepmonitor = StepMonitoringSystem(...
'DataType', 'Image',...
'SourceImage', orgImg,... % Original image
'ObservedImage', obsImg,... % Observed image
'IsMSE', false,... % Switch for MSE evaluation
'IsPSNR', true,... % Switch for PSNR evaluation
'IsSSIM', false,... % Switch for SSIM evaluation
'IsVerbose', isverbose,... % Switch for verbose mode
'IsVisible', isvisible,... % Switch for display intermediate result
'ImageFigureHandle',hfig2); % Figure handle
% Set the object to the ISTA system object
ista.StepMonitor = stepmonitor;
%% Perform ISTA-based image restoration
% STEP method of IstaImRestoration system object, _ista_ , executes
% the ISTA-based image restoration to deblur the observed image.
% As the result, a restored image
%
% $\hat{\mathbf{u}} = \mathbf{D}\hat{\mathbf{y}}$
%
% is obtained.
fprintf('\n ISTA')
resImg = ista.step(obsImg); % STEP method of IstaImRestoration
%% Extract the final evaluation
% The object of StepMonitoringSystem, _stepmonitor_ , stores the
% evaluation values calculated iteratively in ISTA as a vector. The GET
% method of _stepmonitor_ can be used to extract the number of iterations
% and the sequence of PSNRs.
nItr = stepmonitor.nItr;
psnrs = stepmonitor.PSNRs;
psnr_ista = psnrs(nItr);
%% Perform Wiener filtering
% As a reference, let us show a result of Wiener filter.
% Create a step monitor system object for the PSNR evaluation
stepmonitor = StepMonitoringSystem(...
'SourceImage',orgImg,...
'MaxIter', 1,...
'IsMSE', false,...
'IsPSNR', true,...
'IsSSIM', false,...
'IsVisible', false,...
'IsVerbose', isverbose);
% Use the same blur kernel as that applied to the observed image, obsImg
blurKernel = blur.BlurKernel;
% Estimation of noise to signal ratio
nsr = noise_var/var(orgImg(:));
% Wiener filter deconvolution of Image Processing Toolbox
wnfImg = deconvwnr(obsImg, blurKernel, nsr);
% Evaluation
fprintf('\n Wiener')
psnr_wfdc = stepmonitor.step(wnfImg); % STEP method of StepMonitoringSystem
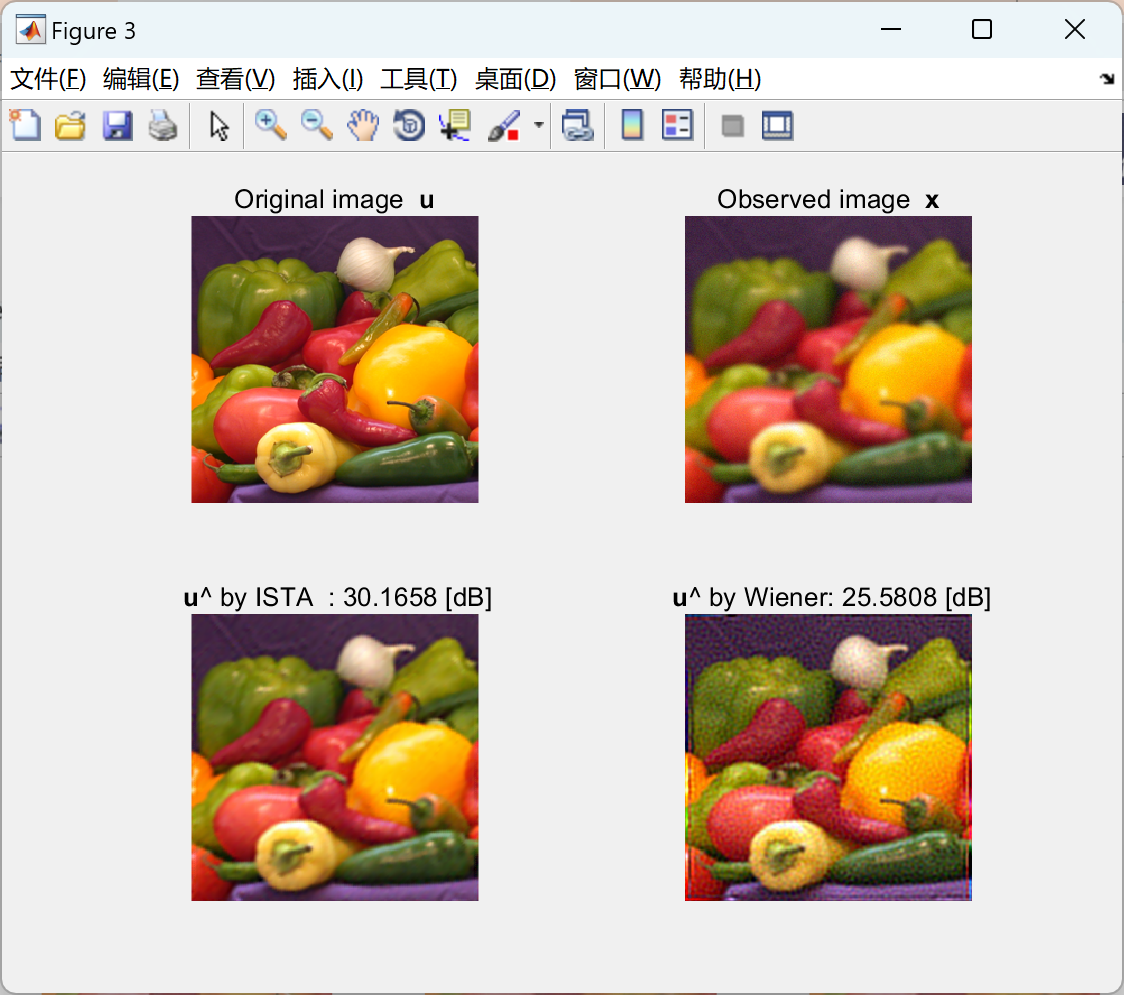
%% Compare deblurring performances
% In order to compare the deblurring performances between two methods,
% ISTA-based deblurring with NSOLT and Wiener filter, let us show
% the original, observed and two results in one figure together.
hfig3 = figure(3);
% Original image x
subplot(2,2,1)
imshow(orgImg)
title('Original image {\bf u}')
% Observed image u
subplot(2,2,2)
imshow(obsImg)
title('Observed image {\bf x}')
% Result u^ of ISTA
subplot(2,2,3)
imshow(resImg)
title(['{\bf u}\^ by ISTA : ' num2str(psnr_ista) ' [dB]'])
% Result u^ of Wiener filter
subplot(2,2,4)
imshow(wnfImg)
title(['{\bf u}\^ by Wiener: ' num2str(psnr_wfdc) ' [dB]'])
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]薛明.压缩感知及稀疏性分解在图像复原中的应用研究[D].西安电子科技大学,2011.DOI:CNKI:CDMD:2.2010.083018.
-
uiki Kobayashi, Shogo Muramatsu, Shunsuke Ono, "Proximal Gradient-Based Loop Unrolling with Interscale Thresholding," Proc. Assoc. Annual Summit and Conf. (APSIPA ASC), Dec. 2021
-
Genki Fujii, Yuta Yoshida, Shogo Muramatsu, Shunsuke Ono, Samuel Choi, Takeru Ota, Fumiaki Nin, Hiroshi Hibino, "OCT Volumetric Data Restoration with Latent Distribution of Refractive Index," Proc. of 2019 IEEE International Conference on Image Processing (ICIP), pp.764-768, Sept. 2019
-
Yuhei Kaneko, Shogo Muramatsu, Hiroyasu Yasuda, Kiyoshi Hayasaka, Yu Otake, Shunsuke Ono, Masahiro Yukawa, "Convolutional-Sparse-Coded Dynamic Mode Decompsition and Its Application to River State Estimation," Proc. of 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pp.1872-1876, May 2019
-
Shogo Muramatsu, Samuel Choi, Shunske Ono, Takeru Ota, Fumiaki Nin, Hiroshi Hibino, "OCT Volumetric Data Restoration via Primal-Dual Plug-and-Play Method," Proc. of 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pp.801-805, Apr. 2018
-
Shogo Muramatsu, Kosuke Furuya and Naotaka Yuki, "Multidimensional Nonseparable Oversampled Lapped Transforms: Theory and Design," IEEE Trans. on Signal Process., Vol.65, No.5, pp.1251-1264, DOI:10.1109/TSP.2016.2633240, March 2017
-
Kota Horiuchi and Shogo Muramatsu, "Fast convolution technique for Non-separable Oversampled Lapped Transforms," Proc. of Asia Pacific Signal and Information Proc. Assoc. Annual Summit and Conf. (APSIPA ASC), Dec. 2016
-
Shogo Muramatsu, Masaki Ishii and Zhiyu Chen, "Efficient Parameter Optimization for Example-Based Design of Non-separable Oversampled Lapped Transform," Proc. of 2016 IEEE Intl. Conf. on Image Process. (ICIP), pp.3618-3622, Sept. 2016
-
Shogo Muramatsu, "Structured Dictionary Learning with 2-D Non-separable Oversampled Lapped Transform," Proc. of 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pp.2643-2647, May 2014
-
Kousuke Furuya, Shintaro Hara and Shogo Muramatsu, "Boundary Operation of 2-D non-separable Oversampled Lapped Transforms," Proc. of Asia Pacific Signal and Information Proc. Assoc. Annual Summit and Conf. (APSIPA ASC), Nov. 2013
-
Shogo Muramatsu and Natsuki Aizawa, "Image Restoration with 2-D Non-separable Oversampled Lapped Transforms," Proc. of 2013 IEEE International Conference on Image Process. (ICIP), pp.1051-1055, Sep. 2013
-
Shogo Muramatsu and Natsuki Aizawa, "Lattice Structures for 2-D Non-separable Oversampled Lapped Transforms," Proc. of 2013 IEEE International Conference on Acoustics, Speech and Signal Process. (ICASSP), pp.5632-5636, May 2013