基于torch_dispatch机制生成Megatron-DeepSpeed调用关系图
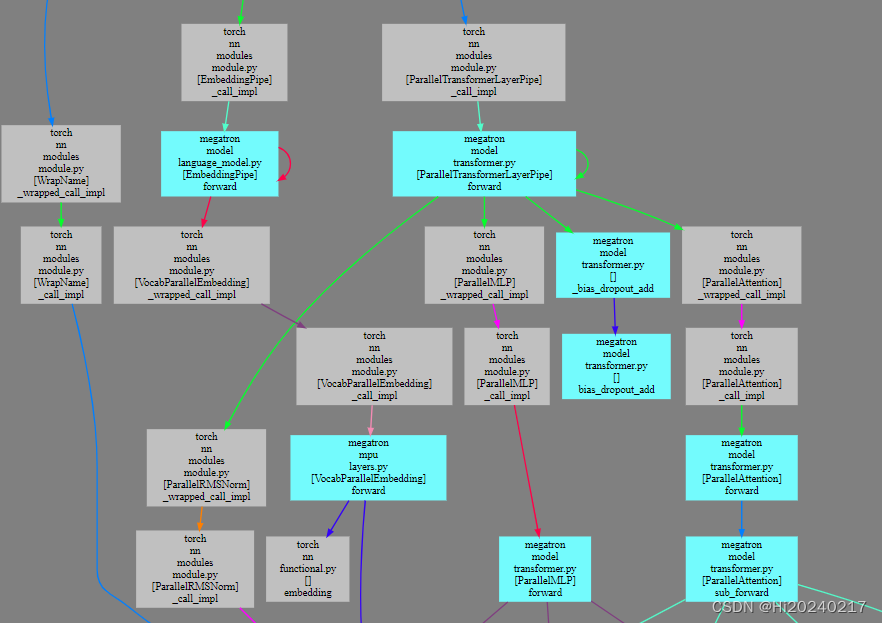
- 一.局部效果图
- 二.运行训练过程,拦截算子,生成调用关系信息
- 三.可视化,生成SVG图像
想知道Megatron-DeepSpeed训练过程中各模块之间的调用关系。torch_dispatch机制可以拦截算子,inspect又能获取到调用栈(文件,类名,函数,行号).基于这些信息可以生成调用关系,最后用graphviz生成SVG图像。该思路也可以用来画其它pytorch工程的调用关系图
1.为了减少图像宽度,一行显示一级文件路径
2.没有显示具体的ATen算子。因为边太乱
一.局部效果图
二.运行训练过程,拦截算子,生成调用关系信息
# 前面构建模型的代码省略
from torch.utils._python_dispatch import TorchDispatchMode
import inspect
from dataclasses import dataclass
from typing import Any
import pickle@dataclass
class _ProfilerState:cls: Anyobject: Any = Noneclass TorchDumpDispatchMode(TorchDispatchMode):def __init__(self,parent):super().__init__()self.parent=parent self.global_index=0 self.nodes=set()self.edges=set()def __del__(self):self.rank = torch.distributed.get_rank()graph={"nodes":self.nodes,"edges":self.edges}with open(f"call_graph_{self.rank}.pkl","wb") as f:pickle.dump(graph,f)def is_keep(self,node):# if node.function.find("wrapper")>=0:# return False# if node.function.find("_call_impl")>=0:# return Falsereturn Truedef __torch_dispatch__(self, func, types, args=(), kwargs=None):self.global_index+=1self.rank = torch.distributed.get_rank() func_packet = func._overloadpacket if kwargs is None:kwargs = {}if self.rank==0:stacks=[i for i in inspect.stack() if self.is_keep(i)]stacks_sz=len(stacks)for idx in range(stacks_sz-1,1,-1):if "self" in stacks[idx].frame.f_locals:class_name = stacks[idx].frame.f_locals["self"].__class__.__name__else:class_name=""this_node=f"{stacks[idx].filename}:[{class_name}]:{stacks[idx].function}"if "self" in stacks[idx-1].frame.f_locals:class_name = stacks[idx-1].frame.f_locals["self"].__class__.__name__else:class_name="" next_node=f"{stacks[idx-1].filename}:[{class_name}]:{stacks[idx-1].function}"self.nodes.add(this_node)self.nodes.add(next_node)self.edges.add(f"{this_node}->{next_node}")# if stacks_sz>1:# if "self" in stacks[1].frame.f_locals:# class_name = stacks[1].frame.f_locals["self"].__class__.__name__# else:# class_name="" # this_node=f"{stacks[1].filename}:[{class_name}]:{stacks[1].function}"# next_node=f"{func_packet.__name__}"# self.nodes.add(this_node) # self.nodes.add(next_node) # self.edges.add(f"{this_node}->{next_node}")ret= func(*args, **kwargs)return retclass TorchDumper:_CURRENT_Dumper = Nonedef __init__(self,schedule: Any):self.p= _ProfilerState(schedule)def __enter__(self):assert TorchDumper._CURRENT_Dumper is NoneTorchDumper._CURRENT_Dumper = selfif self.p.object is None:o = self.p.cls(self)o.__enter__()self.p.object = oelse:self.p.object.step()return selfdef __exit__(self, exc_type, exc_val, exc_tb):TorchDumper._CURRENT_Dumper = Noneif self.p.object is not None:self.p.object.__exit__(exc_type, exc_val, exc_tb)del self.p.object #序列化保存def main():with TorchDumper(TorchDumpDispatchMode):#训练入口pretrain(train_valid_test_datasets_provider,model_provider,forward_step,extra_args_provider=llama_argument_handler,args_defaults={"tokenizer_type": "GPT2BPETokenizer"},)if __name__ == "__main__":main()
三.可视化,生成SVG图像
# coding=utf-8import os
from graphviz import Digraph,Graph
import pickle
import random
from distinctipy import distinctipydef generate_colors(N):'''生成N种有区别度的颜色'''result=[]for red, green, blue in distinctipy.get_colors(N):result.append("#{:02X}{:02X}{:02X}".format(int(red*255), int(green*255), int(blue*255)))return resultdef replace_name(name):'''修改节点名字(缩短,添加换行)'''if name.find("__torch_dispatch__")>=0:return Nonename=name.replace("/home/user/Megatron-DeepSpeed/","")name=name.replace("/home/anaconda3/envs/dev/lib/python3.10/site-packages/","")name=name.replace("/home/user/deepspeed/","")name=name.replace("/home/anaconda3/envs/dev/","")name=name.replace("/",r"\n")name=name.replace(":",r"\n")return name# 1.加载HOOK生成的调用关系文件
rank=0
with open(f"call_graph_{rank}.pkl","rb") as f:data=pickle.load(f)# 2.构建图,设置属性
dot = Digraph()
dot.node_attr = {"shape": "plaintext"}
dot.attr('graph', layout='dot')
dot.graph_attr.update(sep='4.0', ratio='compress')node_desc_id_map={} #节点名与描述的关系映射表
src_node_color={} #节点颜色映射表(同一个节点输出的边颜色一样)colors = generate_colors(10)
colors_sz=len(colors)fontsize="16" #节点字体大小
penwidth="2.0" #边宽度# 3.添加节点
for idx,v in enumerate(data["nodes"]):v=replace_name(v)if v is None:continuenode_desc_id_map[v]=f"{idx}"if v.find("megatron")>=0:dot.node(f"{idx}",v,style='filled',color='#73FBFD',fontsize=fontsize)elif v.find("deepspeed")>=0:dot.node(f"{idx}",v,style='filled',color='#FA8D89',fontsize=fontsize)else:dot.node(f"{idx}",v,style='filled',color='#C0C0C0',fontsize=fontsize)src_node_color[v]=colors[idx%colors_sz]# 4.添加边
for edge in data["edges"]:from_node,to_node=edge.split("->")from_node=replace_name(from_node)to_node=replace_name(to_node)if all([from_node,to_node]):color=src_node_color[from_node]dot.edge(node_desc_id_map[from_node], node_desc_id_map[to_node],color=color,penwidth=penwidth)# 5.保存SVG
save_path='megatron_deepspeed_callgraph'
dot.render(save_path,format='svg', view=False)# 6.修改背景色为灰色
import xml.etree.ElementTree as ET
svg_tree = ET.parse(f'{save_path}.svg')
root = svg_tree.getroot()
element = root.find(".//{http://www.w3.org/2000/svg}polygon")
element.set('fill', 'gray')
svg_tree.write(f'{save_path}.svg')