目录
力扣62. 不同路径
解析代码1_暴搜递归(超时)
解析代码2_记忆化搜索
解析代码3_动态规划
力扣62. 不同路径
62. 不同路径
难度 中等
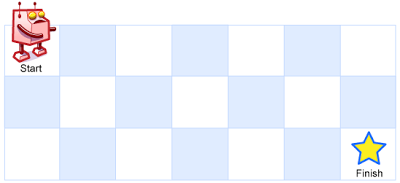
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。
问总共有多少条不同的路径?
示例 1:
输入:m = 3, n = 7 输出:28
示例 2:
输入:m = 3, n = 2 输出:3 解释: 从左上角开始,总共有 3 条路径可以到达右下角。 1. 向右 -> 向下 -> 向下 2. 向下 -> 向下 -> 向右 3. 向下 -> 向右 -> 向下
示例 3:
输入:m = 7, n = 3 输出:28
示例 4:
输入:m = 3, n = 3 输出:6
提示:
1 <= m, n <= 100- 题目数据保证答案小于等于
2 * 10^9
class Solution {
public:int uniquePaths(int m, int n) {}
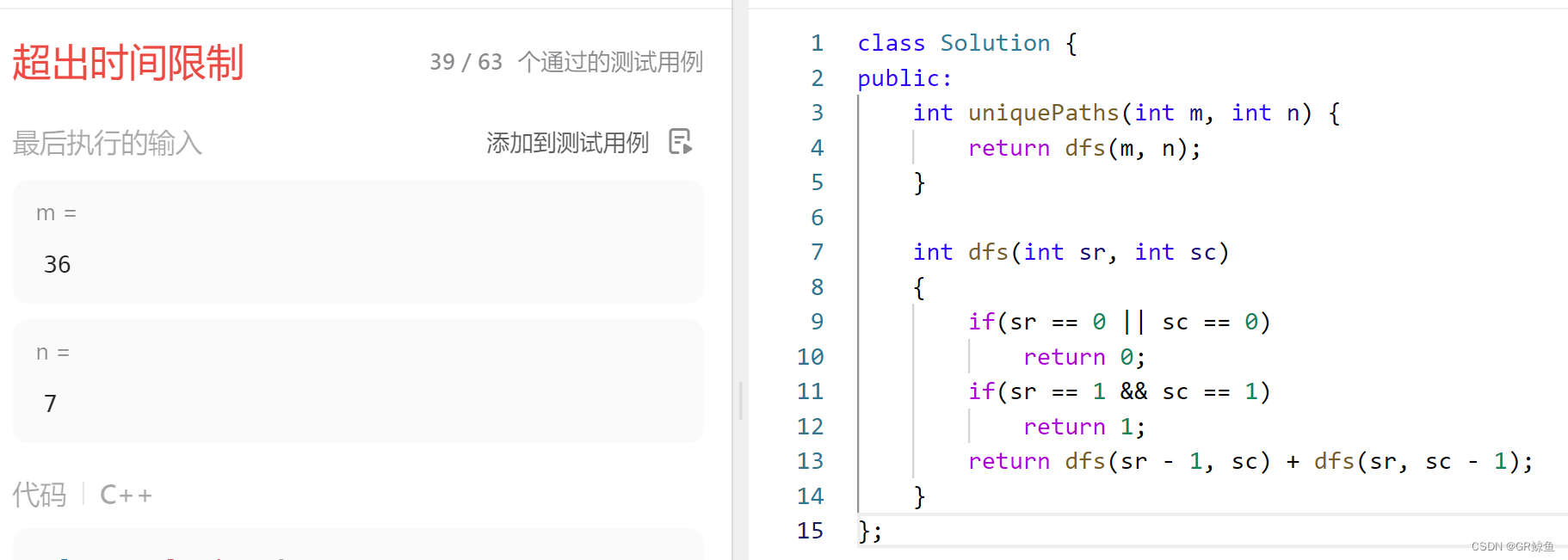
};解析代码1_暴搜递归(超时)
- 递归含义:给 dfs 一个下标,返回从 [0, 0] 位置走到 [i, j] 位置一共有多少种方法。
- 函数体:只要知道到达上面位置的方法数以及到达左边位置的方法数,然后累加起来即可。
- 递归出口:当下标越界的时候返回 0 ,当位于起点的时候,返回 1 。
class Solution {
public:int uniquePaths(int m, int n) {return dfs(m, n);}int dfs(int sr, int sc){if(sr == 0 || sc == 0)return 0;if(sr == 1 && sc == 1)return 1;return dfs(sr - 1, sc) + dfs(sr, sc - 1);}
};
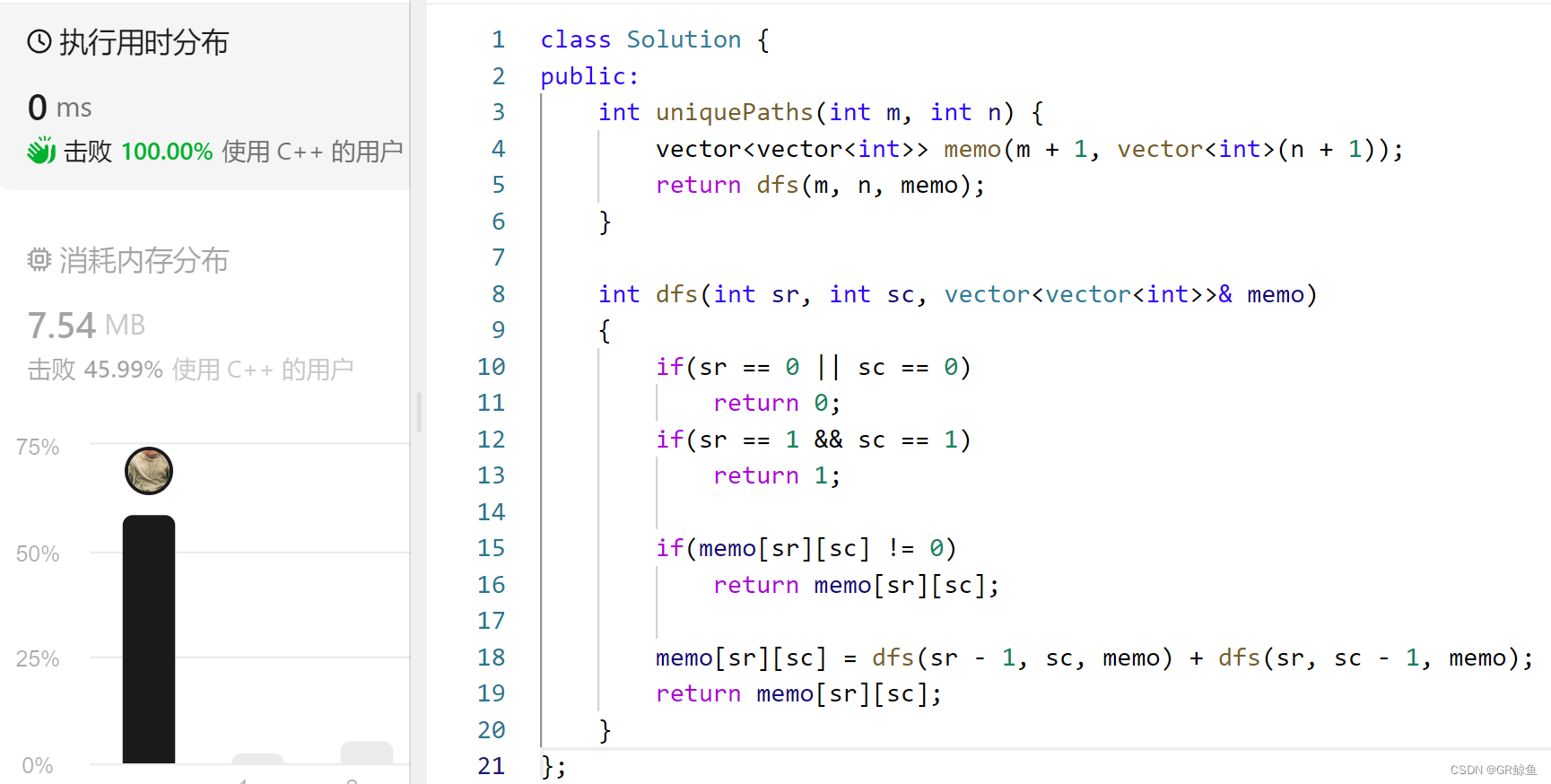
解析代码2_记忆化搜索
记忆化搜索解法:
- 加上一个备忘录。
- 每次进入递归的时候,去备忘录里面看看。
- 每次返回的时候,将结果加入到备忘录里面。
class Solution {
public:int uniquePaths(int m, int n) {vector<vector<int>> memo(m + 1, vector<int>(n + 1));return dfs(m, n, memo);}int dfs(int sr, int sc, vector<vector<int>>& memo){if(sr == 0 || sc == 0)return 0;if(sr == 1 && sc == 1)return 1;if(memo[sr][sc] != 0)return memo[sr][sc];memo[sr][sc] = dfs(sr - 1, sc, memo) + dfs(sr, sc - 1, memo);return memo[sr][sc];}
};
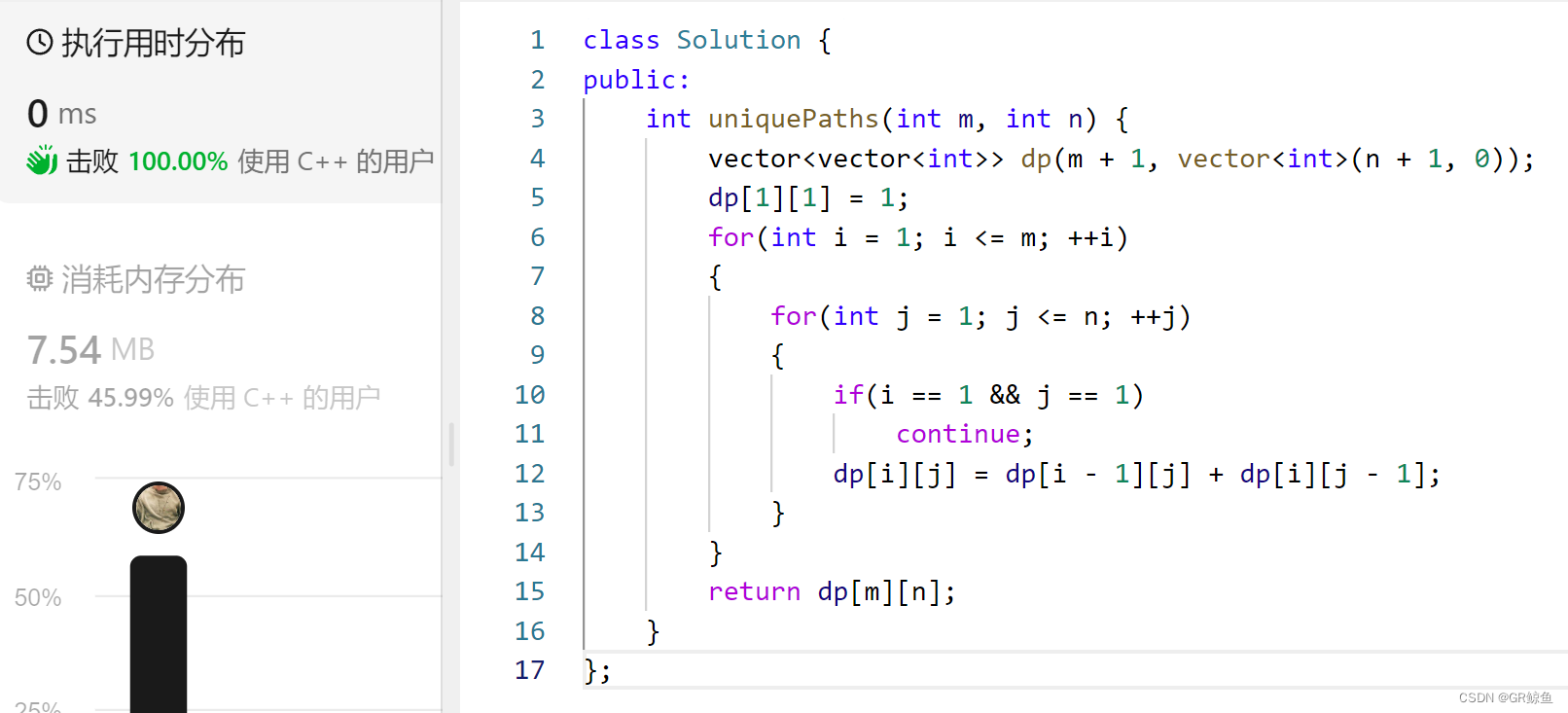
解析代码3_动态规划
根据记忆化搜索得出动态规划的解法:
- 递归含义:状态表示
- 函数体:状态转移方程
- 递归出口:初始化
- 填表顺序:填备忘录的顺序
- 返回值:备忘录的值
class Solution {
public:int uniquePaths(int m, int n) {vector<vector<int>> dp(m + 1, vector<int>(n + 1, 0));dp[1][1] = 1;for(int i = 1; i <= m; ++i){for(int j = 1; j <= n; ++j){if(i == 1 && j == 1)continue;dp[i][j] = dp[i - 1][j] + dp[i][j - 1];}}return dp[m][n];}
};

![P8802 [蓝桥杯 2022 国 B] 出差](https://img-blog.csdnimg.cn/direct/4157ac08b3f7450b8f60cb6c052e5874.png)



