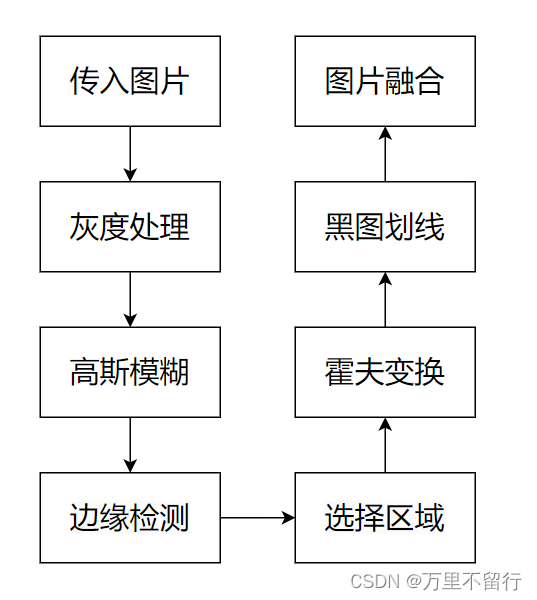
最近在研究高速直线识别,搜了一圈看了很多文章,确定了以下的主要流程。
霍夫变换
lines = cv2.HoughLinesP(image,rho,theta,threshold,lines,minLineLength,maxLineGap)#概率霍夫变换
image:必须是二值图像,推荐使用canny边缘检测的结果图像。
rho:线段以像素为单位的距离紧固带,double类型,推荐使用2.0 距离分辨率,表示以像素为单位的距离精度,参数越高线段越多。
theta:线段以弧度为单位的角度精度,推荐使用numpy.pi/180。
threshod:累加平面的阈值参数,int类型,超过设定的阈值才会被检测出线段,值越大,基本上意味着检出的线段越长,检出的线段个数越少。根据情况推荐先试用100在逐步调整。
lines:可选参数,用于存储检测到的直线的输出数组。返回即为存储图中所有直线的数组。
minLineLength:线段以像素为单位的最小长度,低于这个长度的线段将不会显示,根据应用场景设置。
maxLineGap:同一方向上两条线段判定为一条线段的最大允许间隔,小于这个最大值,都认为是一条线段。
def hough_lines(img, rho, theta, threshold,min_line_len, max_line_gap): #进行霍夫变换lines = cv2.HoughLinesP(img, rho, theta, threshold, np.array([]),minLineLength=min_line_len,maxLineGap=max_line_gap) #概率霍夫变换line_img = np.zeros((img.shape[0], img.shape[1], 3), dtype=np.uint8) #整一个黑底图片,展示画的线#print(lines)draw_lines(line_img, lines) #将底图和直线数组传入draw_lines进行画线return line_img #返回画好的图片
整体代码
# coding:utf-8import cv2
import numpy as np
import os
import numpydef gauss_blur(img): #高斯滤波blur_ksize = 5 # Gaussian blur kernel sizeblur_gray = cv2.GaussianBlur(gray, (blur_ksize, blur_ksize), 0, 0)return blur_graydef canny_edgedet(blur_gray): #canny 边缘检测# Define our parameters for Canny and applylow_threshold = 250high_threshold = 320edges = cv2.Canny(blur_gray, low_threshold, high_threshold)return edgesdef ROI_filtering(edges): #选择需要的区域# Next we'll create a masked edges image using cv2.fillPoly()mask = np.zeros_like(edges)ignore_mask_color = 255# This time we are defining a four sided polygon to mask#imshape = image.shapevertices = np.array([[(30, 300), (220, 200), (400, 80), (860, 300)]], dtype=np.int32)cv2.fillPoly(mask, vertices, ignore_mask_color)masked_edges = cv2.bitwise_and(edges, mask)return masked_edgesdef draw_lines(img, lines, color=[255, 0, 0], thickness=2): #画线x1_list = []lines_list = lines.tolist()#按照线段start x1坐标进行删除重复坐标#print(lines_list)# for line in lines_list:# x1_list.append(line[0][0])# #print(x1_list)# for lin in lines_list:# for i in x1_list:# if abs(int(line[0][0]) - i) <= 30 and abs(int(line[0][0]) - i) != 0:# #print(lin)# lines_list.remove(lin)# #print(lines_list)# print(len(lines_list))#延长直线for line in lines_list:x1 = int(line[0][0]) # 以(x0, y0)为起点,将线段延长y1 = int(line[0][1])x2 = int(line[0][2])y2 = int(line[0][3])# 延长直线#定义起点和终点start_point = (x2,y2)end_point = (x1,y1)#计算线条的方向和长度direction = np.subtract(end_point, start_point)length = np.linalg.norm(direction)#设置延长线的长度因子extension_factor = 200#计算延长线的起点extended_start_point = tuple(np.subtract(start_point, extension_factor * direction / length).astype(int))# 计算延长线的终点extended_end_point = tuple(np.add(end_point, extension_factor * direction / length).astype(int))#画线cv2.line(img, extended_start_point, extended_end_point, color, thickness)#cv2.line(img, (x1, y1), (x2, y2), color, thickness)#print('type(lines_list)',type(lines_list))# for line in lines_list:# for x3, y3, x4, y4 in line:# x1_list.append(x3)# for line in lines_list:# for x1, y1, x2, y2 in line:# print(type(line))# print(x1_list)# for i in x1_list:# #print(abs(int(x1) - i))# if abs(int(x1) - i) <= 120:# pass# #numpy.delete(lines, line, axis=None)# print(lines)# #cv2.line(img, (x1, y1), (x2, y2), color, thickness)def hough_lines(img, rho, theta, threshold,min_line_len, max_line_gap): #进行霍夫变换# cv2.HoughLinesP(image,rho,theta,threshold,lines,minLineLength,maxLineGap)# image:必须是二值图像,推荐使用canny边缘检测的结果图像# rho:线段以像素为单位的距离紧固带,double类型,推荐使用1.0 距离分辨率,表示以像素为单位的距离精度# theta:线段以弧度为单位的角度精度,推荐使用numpy.pi/180# threshod:累加平面的阈值参数,int类型,超过设定的阈值才会被检测出线段,值越大,基本上意味着检出的线段越长,检出的线段个数越少。根据情况推荐先试用100# lines:可选参数,用于存储检测到的直线的输出数组。# minLineLength:线段以像素为单位的最小长度,根据应用场景设置# maxLineGap:同一方向上两条线段判定为一条线段的最大允许间隔,小于这个最大值,都认为是一条线段lines = cv2.HoughLinesP(img, rho, theta, threshold, np.array([]),minLineLength=min_line_len,maxLineGap=max_line_gap) #概率霍夫变换line_img = np.zeros((img.shape[0], img.shape[1], 3), dtype=np.uint8)#print(lines)draw_lines(line_img, lines)return line_imgdef weighted_img(img, initial_img, α=0.7, β=1., λ=0.):return cv2.addWeighted(img, α, initial_img, β, λ) #将画线图和原图重合if __name__=='__main__':img_path = './img/1c.png' #图片位置img = cv2.imread(img_path) #读取原图gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) #将原图转换成灰度图blur_gray = gauss_blur(gray) #高斯滤波canny_img = canny_edgedet(blur_gray)# cv2.imshow('img',masked_edges) #canny边缘检测和非极大值抑制# cv2.waitKey(0)# cv2.destroyAllWindows()# 霍夫变换的参数,这个是我测试最符合我的参数,详细作用看第97行rho = 3theta = np.pi / 180threshold = 180min_line_length = 80max_line_gap = 2000line_img = hough_lines(canny_img, rho, theta, threshold,min_line_length, max_line_gap)mix = weighted_img(line_img, img, α=0.7, β=1., λ=0.)cv2.imshow('img', mix)cv2.waitKey(0)cv2.destroyAllWindows()这是原图

这是画线图
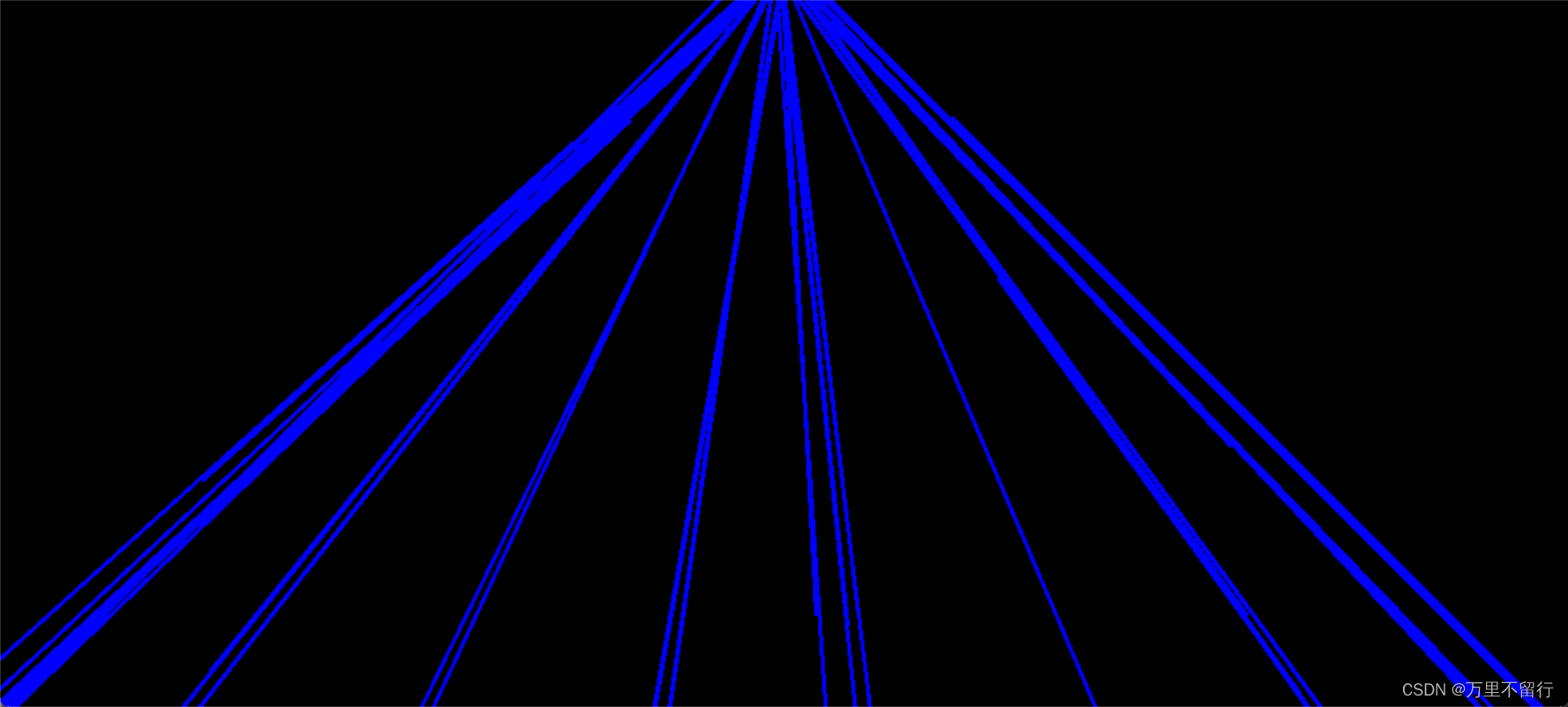
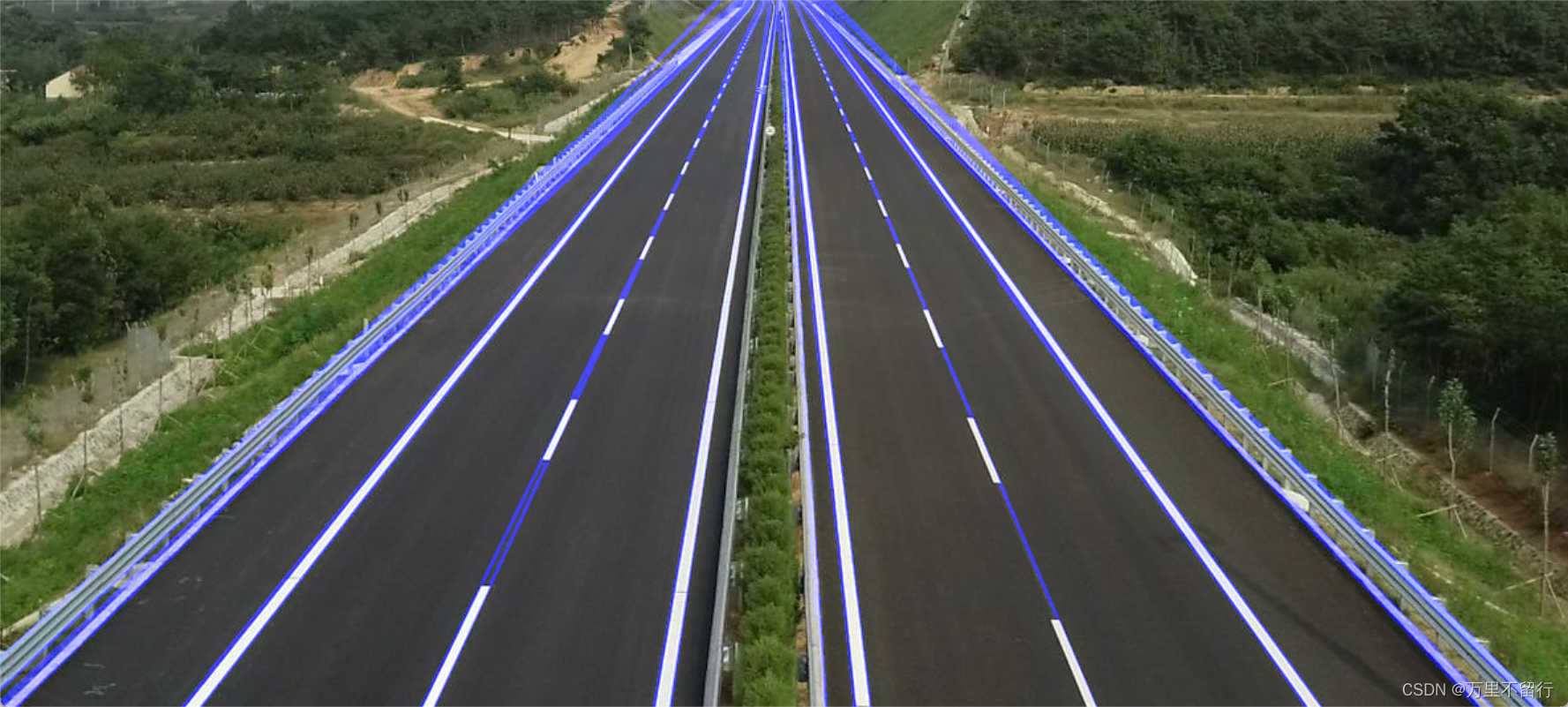
这是最终效果
有待改进:
1、目前没有直线拟合函数,用过很多都有问题,还需突破。
2、与YOLOv5识别进行结合,检测车辆越线别车或非法变道、占用应急车道等违法违规行为。
参考文章:
视觉无人机高速公路违章检测之——车道线检测
OpenCV-Python 霍夫直线检测-HoughLinesP函数参数