概念
运行时的PM与前文描述的系统级挂起到RAM时候的PM不太一样,它是针对单个设备,指系统在非睡眠状态的情况下,某个设备在空闲时可以进入运行时挂起状态,而在不是空闲时执行运行时恢复使得设备进入正常工作状态,如此,这个设备在运行时会省电
struct dev_pm_ops {
...
int (*runtime_suspend)(struct device *dev);
int (*runtime_resume)(struct device *dev);
int (*runtime_idle)(struct device *dev);
...
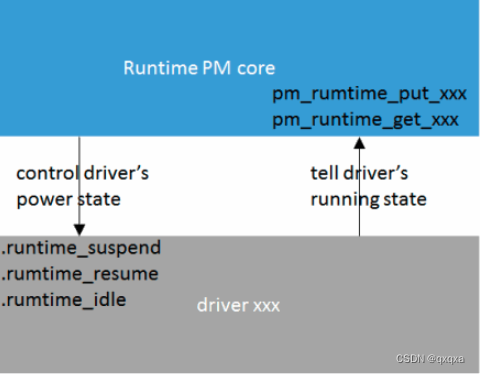
};基本框架简化如下,就是驱动通过runtime pm core提供的接口,再调用到驱动本身的实现
spi_pump_messages
通过之前的文章简述spi内核框架,我们可以知道,这个文件drivers/spi/spi.c里的spi_pump_messages就是一次传输行为,总线空闲就会调用unprepare_transfer_hardware,总线忙就会调用prepare_transfer_hardware;soc根据这两个行为就可以去实现pm操作来省电
static void spi_pump_messages(struct kthread_work *work)
{struct spi_master *master =container_of(work, struct spi_master, pump_messages);unsigned long flags;bool was_busy = false;int ret;/* Lock queue and check for queue work */spin_lock_irqsave(&master->queue_lock, flags);if (list_empty(&master->queue) || !master->running) {if (!master->busy) {spin_unlock_irqrestore(&master->queue_lock, flags);return;}master->busy = false;spin_unlock_irqrestore(&master->queue_lock, flags);if (master->unprepare_transfer_hardware &&master->unprepare_transfer_hardware(master))dev_err(&master->dev,"failed to unprepare transfer hardware\n");return;}/* Make sure we are not already running a message */if (master->cur_msg) {spin_unlock_irqrestore(&master->queue_lock, flags);return;}/* Extract head of queue */master->cur_msg =list_entry(master->queue.next, struct spi_message, queue);list_del_init(&master->cur_msg->queue);if (master->busy)was_busy = true;elsemaster->busy = true;spin_unlock_irqrestore(&master->queue_lock, flags);if (!was_busy && master->prepare_transfer_hardware) {ret = master->prepare_transfer_hardware(master);if (ret) {dev_err(&master->dev,"failed to prepare transfer hardware\n");return;}}ret = master->transfer_one_message(master, master->cur_msg);if (ret) {dev_err(&master->dev,"failed to transfer one message from queue\n");return;}
}unprepare_transfer_hardware
比如在drivers/spi/spi_qsd.c中,unprepare_transfer_hardware接口会去通过pm_runtime_put_autosuspend,去调用pm_dev_ops的runtime_suspend成员
pm_runtime_put_autosuspend__pm_runtime_suspendrpm_suspendcallback = RPM_GET_CALLBACK(dev, runtime_suspend);static int msm_spi_unprepare_transfer_hardware(struct spi_master *master)
{struct msm_spi *dd = spi_master_get_devdata(master);pm_runtime_mark_last_busy(dd->dev);pm_runtime_put_autosuspend(dd->dev);return 0;
}prepare_transfer_hardware
比如在drivers/spi/spi_qsd.c中,prepare_transfer_hardware接口会去通过pm_runtime_get_sync,去调用pm_dev_ops的runtime_resume成员
pm_runtime_get_sync__pm_runtime_resumerpm_resumecallback = RPM_GET_CALLBACK(dev, runtime_resume);rpm_callback(callback, dev);static int msm_spi_prepare_transfer_hardware(struct spi_master *master)
{struct msm_spi *dd = spi_master_get_devdata(master);int resume_state = 0;resume_state = pm_runtime_get_sync(dd->dev);if (resume_state < 0)return resume_state;/** Counter-part of system-suspend when runtime-pm is not enabled.* This way, resume can be left empty and device will be put in* active mode only if client requests anything on the bus*/if (!pm_runtime_enabled(dd->dev))resume_state = msm_spi_pm_resume_runtime(dd->dev);if (resume_state < 0)return resume_state;if (dd->suspended)return -EBUSY;return 0;
}runtime_suspend
runtime_suspend成员的实现如下:主要是去关闭spi控制器的时钟,达到省电的目的
static int msm_spi_pm_suspend_runtime(struct device *device)
{struct platform_device *pdev = to_platform_device(device);struct spi_master *master = platform_get_drvdata(pdev);struct msm_spi *dd;unsigned long flags;dev_err(device, "pm_runtime: suspending...\n");if (!master)goto suspend_exit;dd = spi_master_get_devdata(master);if (!dd)goto suspend_exit;if (dd->suspended)return 0;/** Make sure nothing is added to the queue while we're* suspending*/spin_lock_irqsave(&dd->queue_lock, flags);dd->suspended = 1;spin_unlock_irqrestore(&dd->queue_lock, flags);/* Wait for transactions to end, or time out */wait_event_interruptible(dd->continue_suspend,!dd->transfer_pending);if (dd->pdata && !dd->pdata->active_only)msm_spi_clk_path_unvote(dd);suspend_exit:return 0;
}runtime_resume
runtime_resume成员的实现如下,主要是去开启spi控制的时钟
static int msm_spi_pm_resume_runtime(struct device *device)
{struct platform_device *pdev = to_platform_device(device);struct spi_master *master = platform_get_drvdata(pdev);struct msm_spi *dd;int ret = 0;dev_err(device, "pm_runtime: resuming...\n");if (!master)goto resume_exit;dd = spi_master_get_devdata(master);if (!dd)goto resume_exit;if (!dd->suspended)return 0;if (!dd->is_init_complete) {ret = init_resources(pdev);if (ret != 0)return ret;elsedd->is_init_complete = true;}msm_spi_clk_path_init(dd);if (!dd->pdata->active_only)msm_spi_clk_path_vote(dd);dd->suspended = 0;resume_exit:return 0;
}dev_pm_ops
将实现赋值给dev_pm_ops结构里的runtime_suspend和runtime_resume成员
static const struct dev_pm_ops msm_spi_dev_pm_ops = {SET_SYSTEM_SLEEP_PM_OPS(msm_spi_suspend, msm_spi_resume)SET_RUNTIME_PM_OPS(msm_spi_pm_suspend_runtime,msm_spi_pm_resume_runtime, NULL)
};static struct platform_driver msm_spi_driver = {.driver = {.name = SPI_DRV_NAME,.owner = THIS_MODULE,.pm = &msm_spi_dev_pm_ops,.of_match_table = msm_spi_dt_match,},.remove = msm_spi_remove,.probe = msm_spi_probe,
};pm_runtime_get/put
在/drivers/base/power/runtime.c中,设备驱动调用的pm_runtime_get/put 会先原子操作usage,然后判断是否调用rpm_idle/rpm_suspend/rpm_resume;他们会来执行设备驱动实现的对应操作;suspend_timer用定时器来延时调用rpm_suspend
void pm_runtime_init(struct device *dev)
{dev->power.runtime_status = RPM_SUSPENDED;dev->power.last_status = RPM_INVALID;dev->power.idle_notification = false;dev->power.disable_depth = 1;atomic_set(&dev->power.usage_count, 0);dev->power.runtime_error = 0;atomic_set(&dev->power.child_count, 0);pm_suspend_ignore_children(dev, false);dev->power.runtime_auto = true;dev->power.request_pending = false;dev->power.request = RPM_REQ_NONE;dev->power.deferred_resume = false;dev->power.needs_force_resume = 0;INIT_WORK(&dev->power.work, pm_runtime_work);dev->power.timer_expires = 0;hrtimer_init(&dev->power.suspend_timer, CLOCK_MONOTONIC, HRTIMER_MODE_ABS);dev->power.suspend_timer.function = pm_suspend_timer_fn;init_waitqueue_head(&dev->power.wait_queue);
}static void pm_runtime_work(struct work_struct *work)
{struct device *dev = container_of(work, struct device, power.work);enum rpm_request req;spin_lock_irq(&dev->power.lock);if (!dev->power.request_pending)goto out;req = dev->power.request;dev->power.request = RPM_REQ_NONE;dev->power.request_pending = false;switch (req) {case RPM_REQ_NONE:break;case RPM_REQ_IDLE:rpm_idle(dev, RPM_NOWAIT);break;case RPM_REQ_SUSPEND:rpm_suspend(dev, RPM_NOWAIT);break;case RPM_REQ_AUTOSUSPEND:rpm_suspend(dev, RPM_NOWAIT | RPM_AUTO);break;case RPM_REQ_RESUME:rpm_resume(dev, RPM_NOWAIT);break;}out:spin_unlock_irq(&dev->power.lock);
}






![[Cesium for Supermap]加载iserver发布的wms服务](https://img-blog.csdnimg.cn/direct/e1ce7d7be7fe4a519e84a576dd3d36bf.png)