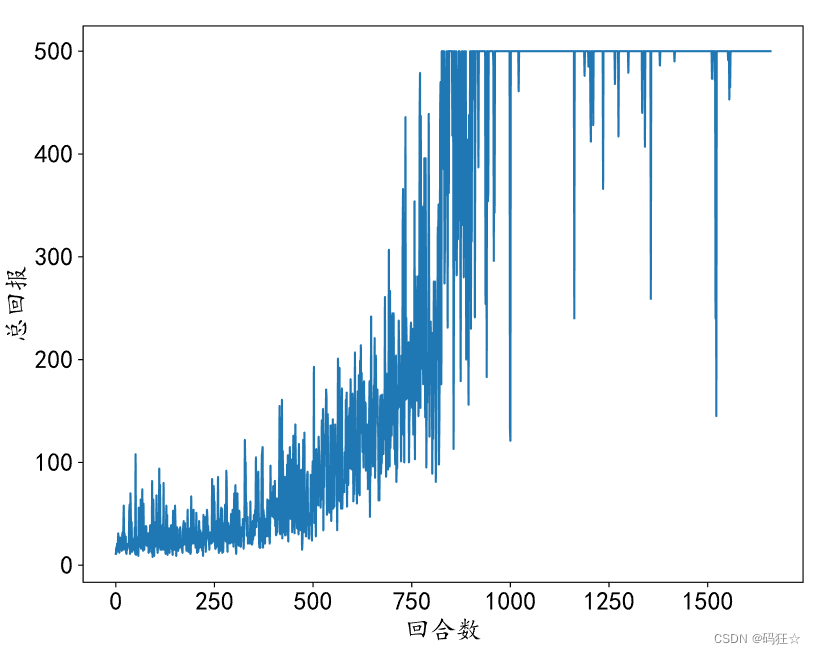
强化学习A3C算法
效果:
a3c.py
import matplotlib
from matplotlib import pyplot as plt
matplotlib.rcParams['font.size'] = 18
matplotlib.rcParams['figure.titlesize'] = 18
matplotlib.rcParams['figure.figsize'] = [9, 7]
matplotlib.rcParams['font.family'] = ['KaiTi']
matplotlib.rcParams['axes.unicode_minus']=Falseplt.figure()import os
import threading
import gym
import multiprocessing
import numpy as np
from queue import Queueimport tensorflow as tf
from tensorflow import keras
from tensorflow.keras import layers,optimizers,losses# os.environ["CUDA_VISIBLE_DEVICES"] = "0" #使用GPU
# 按需占用GPU显存
gpus = tf.config.experimental.list_physical_devices('GPU')
if gpus:try:# 设置 GPU 显存占用为按需分配,增长式for gpu in gpus:tf.config.experimental.set_memory_growth(gpu, True)except RuntimeError as e :# 异常处理print(e)SEED_NUM = 1234
tf.random.set_seed(SEED_NUM)
np.random.seed(SEED_NUM)
os.environ['TF_CPP_MIN_LOG_LEVEL'] = '2'
assert tf.__version__.startswith('2.')# 互斥锁,用于线程同步数据
g_mutex = threading.Lock()class ActorCritic(keras.Model):""" Actor-Critic模型 """def __init__(self, state_size, action_size):super(ActorCritic, self).__init__()self.state_size = state_size # 状态向量长度self.action_size = action_size # 动作数量# 策略网络Actorself.dense1 = layers.Dense(128, activation='relu')self.policy_logits = layers.Dense(action_size)# V网络Criticself.dense2 = layers.Dense(128, activation='relu')self.values = layers.Dense(1)def call(self, inputs):# 获得策略分布Pi(a|s)x = self.dense1(inputs)logits = self.policy_logits(x)# 获得v(s)v = self.dense2(inputs)values = self.values(v)return logits, valuesdef record(episode,episode_reward,worker_idx,global_ep_reward,result_queue,total_loss,num_steps):""" 统计工具函数 """if global_ep_reward == 0:global_ep_reward = episode_rewardelse:global_ep_reward = global_ep_reward * 0.99 + episode_reward * 0.01print(f"{episode} | "f"Average Reward: {int(global_ep_reward)} | "f"Episode Reward: {int(episode_reward)} | "f"Loss: {int(total_loss / float(num_steps) * 1000) / 1000} | "f"Steps: {num_steps} | "f"Worker: {worker_idx}")result_queue.put(global_ep_reward) # 保存回报,传给主线程return global_ep_rewardclass Memory:""" 数据 """def __init__(self):self.states = []self.actions = []self.rewards = []def store(self, state, action, reward):self.states.append(state)self.actions.append(action)self.rewards.append(reward)def clear(self):self.states = []self.actions = []self.rewards = []class Agent:""" 智能体,包含了中央参数网络server """def __init__(self):# 服务模型优化器,client不需要,直接从server拉取参数self.opt = optimizers.Adam(1e-3)# 服务模型(状态向量,动作数量)self.server = ActorCritic(4, 2) self.server(tf.random.normal((2, 4)))def train(self):# 共享队列,线程安全,不需要加锁同步res_queue = Queue() # 根据cpu线程数量创建多线程Workerworkers = [Worker(self.server, self.opt, res_queue, i)for i in range(10)] #multiprocessing.cpu_count()# 启动多线程Workerfor i, worker in enumerate(workers):print("Starting worker {}".format(i))worker.start()# 统计并绘制总回报曲线returns = []while True:reward = res_queue.get()if reward is not None:returns.append(reward)else: # 结束标志break# 等待线程退出 [w.join() for w in workers] print(returns)plt.figure()plt.plot(np.arange(len(returns)), returns)# plt.plot(np.arange(len(moving_average_rewards)), np.array(moving_average_rewards), 's')plt.xlabel('回合数')plt.ylabel('总回报')plt.savefig('a3c-tf-cartpole.svg')class Worker(threading.Thread): def __init__(self, server, opt, result_queue, idx):super(Worker, self).__init__()self.result_queue = result_queue # 共享队列self.server = server # 服务模型self.opt = opt # 服务优化器self.client = ActorCritic(4, 2) # 线程私有网络self.worker_idx = idx # 线程idself.env = gym.make('CartPole-v1').unwrapped #私有环境self.ep_loss = 0.0def run(self): # 每个worker自己维护一个memorymem = Memory() # 1回合最大500步for epi_counter in range(500): # 复位client游戏状态current_state,info = self.env.reset(seed=SEED_NUM) mem.clear()ep_reward = 0.0ep_steps = 0 done = Falsewhile not done:# 输入AC网络状态获得Pi(a|s),未经softmaxlogits, _ = self.client(tf.constant(current_state[None, :],dtype=tf.float32))# 归一化概率probs = tf.nn.softmax(logits)# 随机采样动作action = np.random.choice(2, p=probs.numpy()[0])# 交互 new_state, reward, done, truncated, info = self.env.step(action) # 累加奖励ep_reward += reward # 记录mem.store(current_state, action, reward) # 计算回合步数ep_steps += 1# 刷新状态 current_state = new_state # 最长500步或者规则结束,回合结束if ep_steps >= 500 or done: # 计算当前client上的误差with tf.GradientTape() as tape:total_loss = self.compute_loss(done, new_state, mem) # 计算梯度grads = tape.gradient(total_loss, self.client.trainable_weights)# 梯度提交到server,在server上更新梯度global g_mutexg_mutex.acquire()self.opt.apply_gradients(zip(grads,self.server.trainable_weights))g_mutex.release()# 从server拉取最新的梯度g_mutex.acquire()self.client.set_weights(self.server.get_weights())g_mutex.release()# 清空Memory mem.clear() # 统计此回合回报self.result_queue.put(ep_reward)print(f"thread worker_idx : {self.worker_idx}, episode reward : {ep_reward}")break# 线程结束self.result_queue.put(None) def compute_loss(self,done,new_state,memory,gamma=0.99):if done:reward_sum = 0. # 终止状态的v(终止)=0else:# 私有网络根据新状态计算回报reward_sum = self.client(tf.constant(new_state[None, :],dtype=tf.float32))[-1].numpy()[0]# 统计折扣回报discounted_rewards = []for reward in memory.rewards[::-1]: # reverse buffer rreward_sum = reward + gamma * reward_sumdiscounted_rewards.append(reward_sum)discounted_rewards.reverse()# 输入AC网络环境状态获取 Pi(a|s) v(s) 预测值logits, values = self.client(tf.constant(np.vstack(memory.states), dtype=tf.float32))# 计算advantage = R() - v(s) = 真实值 - 预测值advantage = tf.constant(np.array(discounted_rewards)[:, None], dtype=tf.float32) - values# Critic网络损失value_loss = advantage ** 2# 归一化概率预测值Pi(a|s)policy = tf.nn.softmax(logits)# 真实动作a 概率预测值Pi(a|s) 交叉熵policy_loss = tf.nn.sparse_softmax_cross_entropy_with_logits(labels=memory.actions, logits=logits)# 计算策略网络损失时,并不会计算V网络policy_loss = policy_loss * tf.stop_gradient(advantage)# 动作概率测值Pi(a|s) 熵entropy = tf.nn.softmax_cross_entropy_with_logits(labels=policy, logits=logits)policy_loss = policy_loss - 0.01 * entropy# 聚合各个误差total_loss = tf.reduce_mean((0.5 * value_loss + policy_loss))return total_lossif __name__ == '__main__':master = Agent()master.train()