数据生成 | MATLAB实现WGAN生成对抗网络数据生成
目录
- 数据生成 | MATLAB实现WGAN生成对抗网络数据生成
- 生成效果
- 基本描述
- 程序设计
- 参考资料
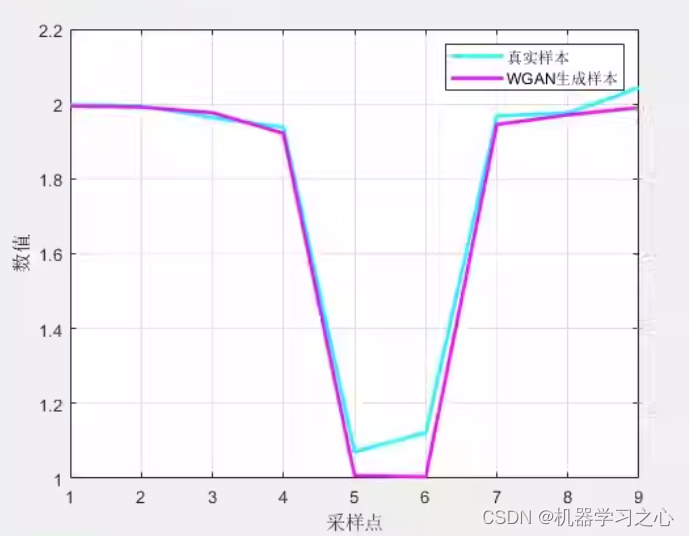
生成效果
基本描述
1.WGAN生成对抗网络,数据生成,样本生成程序,MATLAB程序;
2.适用于MATLAB 2020版及以上版本;
3.基于Wasserstein生成对抗网络(Wasserstein Generative Adversarial Network,WGAN)的数据生成模型引入了梯度惩罚(Gradient Penalty)来改善训练的稳定性和生成样本的质量。WGAN旨在解决原始生成对抗网络(GAN)中的训练不稳定性和模式崩溃等问题。基于Wasserstein生成对抗网络梯度惩罚的数据生成模型在一些应用中表现出较好的性能和稳定性,帮助解决了传统GAN中的一些问题,如模式崩溃和训练不稳定等。它已经被广泛应用于图像生成、数据合成等领域。;
4.数据扩充:对于数据不足的情况,WGAN梯度惩罚可以用于合成新的数据样本,用于模型训练,如自然语言处理中的文本生成。。
5.数据增强:在训练深度学习模型时,可以使用WGAN梯度惩罚合成额外的训练样本,提高模型的鲁棒性和泛化能力。
6.使用便捷:
直接使用EXCEL表格导入数据,无需大幅修改程序。内部有详细注释,易于理解。
程序设计
- 完整程序和数据获取方式:私信博主回复MATLAB实现WGAN生成对抗网络数据生成。
tempLayers = [convolution2dLayer([3, 1], 16, "Name", "conv_1", "Padding", "same") % 建立卷积层,卷积核大小[3, 1],16个特征图reluLayer("Name", "relu_1") % Relu 激活层convolution2dLayer([3, 1], 32, "Name", "conv_2", "Padding", "same") % 建立卷积层,卷积核大小[3, 1],32个特征图reluLayer("Name", "relu_2")]; % Relu 激活层
lgraph = addLayers(lgraph, tempLayers); % 将上述网络结构加入空白结构中tempLayers = [sequenceUnfoldingLayer("Name", "sequnfold") % 建立序列反折叠层flattenLayer("Name", "flatten") % 网络铺平层lgraph = addLayers(lgraph, tempLayers); % 将上述网络结构加入空白结构中
lgraph = connectLayers(lgraph, "seqfold/out", "conv_1"); % 折叠层输出 连接 卷积层输入
lgraph = connectLayers(lgraph, "seqfold/miniBatchSize", "sequnfold/miniBatchSize"); % 折叠层输出连接反折叠层输入
lgraph = connectLayers(lgraph, "relu_2", "sequnfold/in"); % 激活层输出 连接 反折叠层输入%% 参数设置
options = trainingOptions('adam', ... % Adam 梯度下降算法'MaxEpochs', 500,... % 最大训练次数 1000'InitialLearnRate', best_lr,... % 初始学习率为0.001'L2Regularization', best_l2,... % L2正则化参数'LearnRateSchedule', 'piecewise',... % 学习率下降'LearnRateDropFactor', 0.1,... % 学习率下降因子 0.1'LearnRateDropPeriod', 400,... % 经过800次训练后 学习率为 0.001*0.1'Shuffle', 'every-epoch',... % 每次训练打乱数据集'ValidationPatience', Inf,... % 关闭验证'Plots', 'training-progress',... % 画出曲线'Verbose', false);%% 训练
net = trainNetwork(p_train, t_train, lgraph, options);
参考资料
[1] https://blog.csdn.net/kjm13182345320/article/details/129036772?spm=1001.2014.3001.5502
[2] https://blog.csdn.net/kjm13182345320/article/details/128690229