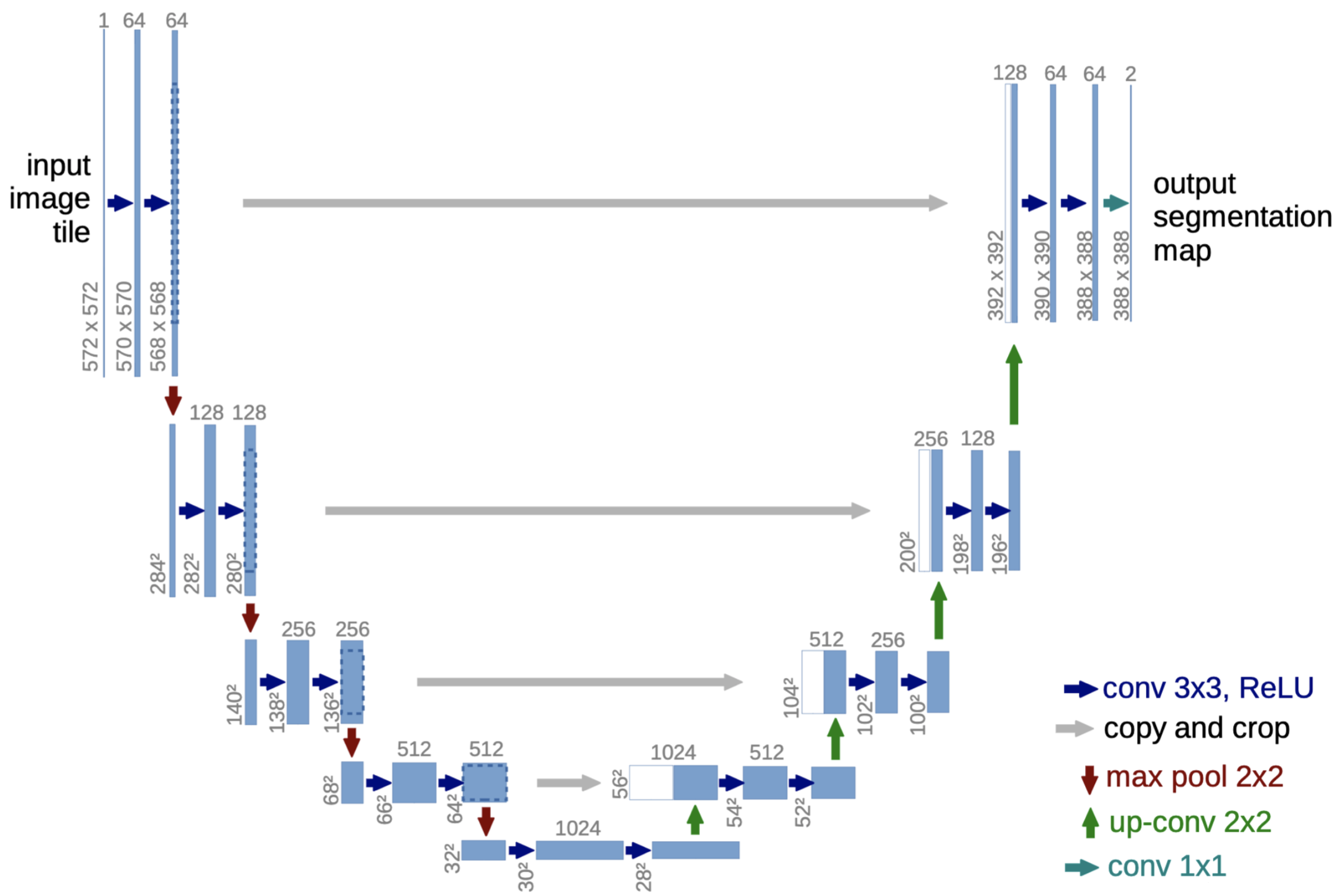
和FCN类似,UNet是另一个做语义分割的网络,网络从输入到输出中间呈一个U型而得名。
相比于FCN,UNet增加了更多的中间连接,能够更好处理不同尺度上的特征。
网络结构如下:
下面代码是用UNet对VOC数据集做的语义分割。
import torch import torch.nn as nn import torch.optim as optim from torch.utils.data import Dataset,DataLoader from torchvision import transforms import os from PIL import Image import numpy as nptransform = transforms.Compose([transforms.Resize((256, 256)),transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]) ])device = torch.device("cuda" if torch.cuda.is_available() else "cpu")colormap = [[0,0,0],[128,0,0],[0,128,0], [128,128,0], [0,0,128],[128,0,128],[0,128,128],[128,128,128],[64,0,0],[192,0,0],[64,128,0],[192,128,0],[64,0,128],[192,0,128],[64,128,128],[192,128,128],[0,64,0],[128,64,0],[0,192,0],[128,192,0],[0,64,128]]class VOCData(Dataset):def __init__(self, root):super(VOCData, self).__init__()self.lab_path = root + 'VOC2012/SegmentationClass/'self.img_path = root + 'VOC2012/JPEGImages/'self.lab_names = self.get_file_names(self.lab_path)self.img_names=[]for file in self.lab_names:self.img_names.append(file.replace('.png', '.jpg'))self.cm2lbl = np.zeros(256**3) for i,cm in enumerate(colormap): self.cm2lbl[cm[0]*256*256+cm[1]*256+cm[2]] = iself.image = []self.label = []for i in range(len(self.lab_names)):image = Image.open(self.img_path+self.img_names[i]).convert('RGB')image = transform(image)label = Image.open(self.lab_path+self.lab_names[i]).convert('RGB').resize((256,256))label = torch.from_numpy(self.image2label(label))self.image.append(image)self.label.append(label)def __len__(self):return len(self.image)def __getitem__(self, idx):return self.image[idx], self.label[idx]def get_file_names(self,directory):file_names = []for file_name in os.listdir(directory):if os.path.isfile(os.path.join(directory, file_name)):file_names.append(file_name)return file_namesdef image2label(self,im):data = np.array(im, dtype='int32')idx = data[:, :, 0] * 256 * 256 + data[:, :, 1] * 256 + data[:, :, 2]return np.array(self.cm2lbl[idx], dtype='int64')class convblock(nn.Module):def __init__(self, in_channels, out_channels):super(convblock, self).__init__()self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1)self.bn1 = nn.BatchNorm2d(out_channels)self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)self.bn2 = nn.BatchNorm2d(out_channels)self.relu = nn.ReLU(inplace=True)def forward(self, x):x = self.conv1(x)x = self.bn1(x)x = self.relu(x)x = self.conv2(x)x = self.bn2(x)x = self.relu(x) return xclass Unet(nn.Module):def __init__(self, num_classes):super(Unet, self).__init__()self.conv_block1 = convblock(3,64)self.conv_block2 = convblock(64,128)self.conv_block3 = convblock(128,256)self.conv_block4 = convblock(256,512)self.conv_block5 = convblock(512,1024)self.upsample1 = nn.ConvTranspose2d(1024, 512, kernel_size=2, stride=2, padding=0)self.upsample2 = nn.ConvTranspose2d(512, 256, kernel_size=2, stride=2, padding=0)self.upsample3 = nn.ConvTranspose2d(256, 128, kernel_size=2, stride=2, padding=0)self.upsample4 = nn.ConvTranspose2d(128, 64, kernel_size=2, stride=2, padding=0)self.conv_block6 = convblock(1024,512)self.conv_block7 = convblock(512,256)self.conv_block8 = convblock(256,128)self.conv_block9 = convblock(128,64)self.maxpool = nn.MaxPool2d(kernel_size=2, stride=2)self.conv_out = convblock(64,num_classes)def forward(self, x):x1 = self.conv_block1(x) x = self.maxpool(x1) x2 = self.conv_block2(x) x = self.maxpool(x2)x3 = self.conv_block3(x)x = self.maxpool(x3)x4 = self.conv_block4(x)x = self.maxpool(x4)x = self.conv_block5(x)x = self.upsample1(x)x = torch.cat([x4,x],dim=1)x = self.conv_block6(x)x = self.upsample2(x)x = torch.cat([x3,x],dim=1)x = self.conv_block7(x)x = self.upsample3(x)x = torch.cat([x2,x],dim=1)x = self.conv_block8(x)x = self.upsample4(x)x = torch.cat([x1,x],dim=1)x = self.conv_block9(x)x = self.conv_out(x)return xdef train():train_dataset = VOCData(root='./VOCdevkit/')train_loader = DataLoader(train_dataset, batch_size=4, shuffle=True)net = Unet(21)optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)criterion = nn.CrossEntropyLoss()net.to(device)net.train()num_epochs = 100for epoch in range(num_epochs):loss_sum = 0img_sum = 0for inputs, labels in train_loader:inputs = inputs.to(device)labels = labels.to(device)outputs = net(inputs)loss = criterion(outputs, labels) optimizer.zero_grad()loss.backward()optimizer.step()loss_sum += loss.item()img_sum += inputs.shape[0]print('epochs:',epoch,loss_sum / img_sum )torch.save(net.state_dict(), 'unet.pth')def val():net = Unet(21)net.load_state_dict(torch.load('unet.pth'))net.to(device)net.eval()image = Image.open('./VOCdevkit/VOC2012/JPEGImages/2012_001064.jpg').convert('RGB')image = transform(image).unsqueeze(0).to(device)out = net(image).squeeze(0)ToPIL= transforms.ToPILImage()maxind = torch.argmax(out,dim=0)outimg = torch.zeros([3,256,256])for y in range(256):for x in range(256):outimg[:,x,y] = torch.from_numpy(np.array(colormap[maxind[x,y]]))re = ToPIL(outimg)re.show()if __name__ == "__main__":train()#val()



![电影《749局》迅雷BT下载/百度云下载资源[MP4/2.12GB/5.35GB]超清版](https://img2024.cnblogs.com/blog/3514446/202410/3514446-20241001142111253-1293388443.jpg)
![电影《749局》迅雷百度云下载资源4K分享[1.16GB/2.72GBMKV]高清加长版【1280P已完结】](https://img2024.cnblogs.com/blog/3514446/202410/3514446-20241001142336788-1614095886.jpg)


![[rCore学习笔记 028] Rust 中的动态内存分配](https://img2024.cnblogs.com/blog/3071041/202410/3071041-20241001133558797-252701878.png)

