文章目录
前言
6.3.1 概述
6.3.2 自动任务类型
6.3.3 创建合成图像
前言
本文介绍 ArduPilot 的相机和云台命令,并说明如何在 Mission Planner 中使用这些命令来定义相机勘测任务。这些说明假定已经连接并配置了相机触发器和云台(camera trigger and gimbal have already been connected and configured)。
6.3.1 概述
规划摄像任务与规划其他任何带有航点和事件(planning any other mission with waypoints and events)的任务几乎完全相同。唯一不同的是,在摄像任务中,你可以指定在航点或飞行器移动过程中的固定时间间隔触发相机快门的命令。如果摄像机安装在云台上,你还可以设置云台方向,或让它跟踪某个特定的兴趣点。
对于简单的任务,你可以手动指定所需的航点和相机指令。对于更复杂的路径和网格勘测,Mission Planner 提供的工具可为任意区域自动生成所需的任务,从而简化了操作。
相机命令
- DO_SET_CAM_TRIGG_DIST — 定时触发相机快门。这最常用于辅助区域勘测;
- DO_DIGICAM_CONTROL — 每次调用此命令时触发一次相机快门;
- DO_AUX_FUNCTION —它允许在任务中执行任何辅助功能(auxiliary function),而无需设置辅助开关。这包括摄像机开始录制、摄像机变焦、摄像机手动对焦和摄像机自动对焦。
相机云台命令
如果使用的是相机云台,则可以设置相机位置(偏航、倾斜、横滚)或将其对准特定的感兴趣区域(ROI):
- DO_SET_ROI — 将摄像机瞄准指定的感兴趣区域(位置,包括高度);
- DO_GIMBAL_MANAGER_PITCHYAW — 将云台移动到所需的俯仰角和偏航角(单位:度)。正俯仰角为向上,负俯仰角为向下。正偏航角为顺时针,负偏航角为逆时针。如果"Flags"字段为"0",则偏航角度为"机身框架"角度(例如 0 表示向前)。如果"Flags"字段为"16",则偏航角为"地球框架"(例如 0 为正北);
- DO_MOUNT_CONTROL — 以指定的横滚、俯仰和偏航定位云台。
伺服和继电器命令
舵机和继电器输出可连接到硬件,并在执行任务时分别使用 DO_SET_SERVO 或 DO_SET_RELAY 命令激活。
这些输出的一个可能用途是控制快门以外的相机功能(例如,设置变焦级别或将拍摄从静态切换到视频)。
!Note
将舵机或继电器连接到摄像机的方法以及可访问的功能取决于摄像机及其支持的遥控装置(请参阅摄像机和云台 wiki 页面的摄像机控制和地理标记部分)(Camera Control and GeoTagging section of the Cameras and Gimbals wiki page)。
6.3.2 自动任务类型
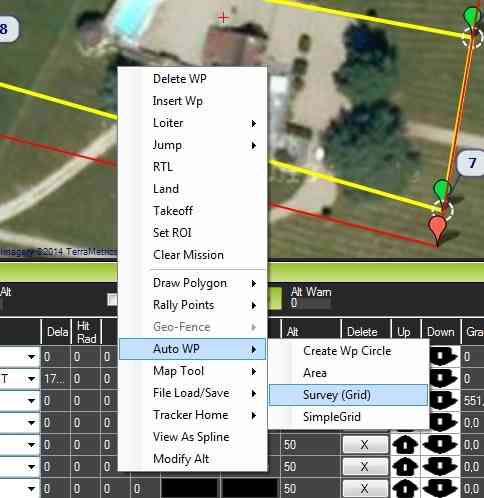
Mission Planner 支持以下自动航点选项。要访问这些选项,请打开"飞行计划"屏幕,右键单击地图,然后从"自动航点"菜单下选择选项:
- Create WP Circle — 创建一个航点圈;
- Area — 显示当前多边形的面积(如果已定义);
- Create Spline Circle — 一个圆圈,其中航点的高度遵循一条上升斜线(与飞行器有关);
- Survey (Grid) — 自动创建航点和相机控制指令,勘测指定的多边形;
- Survey (Gridv2) — 正在建设中!这是一个更简单的网格控件,用于创建矩形测量区域;
- SimpleGrid — 一个简单的自动创建的测量网格。未定义相机控制,因此必须单独添加。
以下部分包括社区提供的自动勘测任务示例。
Survey (Grid) Example
Mission Planner 的勘测(网格)选项可自动定义覆盖任意多边形所需的航点,并在相关航点上设置 DO_SET_CAM_TRIGG_DIST,以确保在飞行器路径上以固定间隔捕获图片。
- 打开"飞行计划"选项卡;
- 右键点击地图,选择绘制多边形 | 添加多边形点。在要拍摄的区域周围创建点;
- 右键点击地图,选择自动 WP | 勘测(网格):
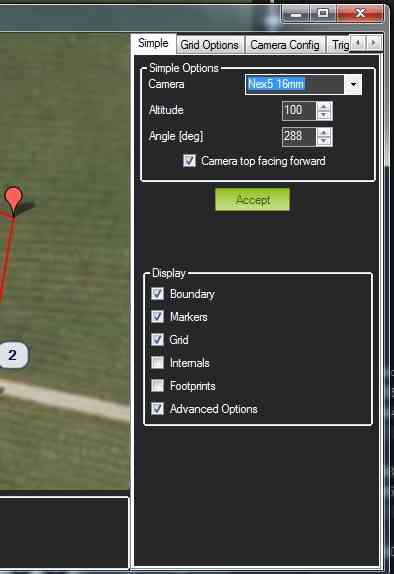
- 然后,Mission Planner 将显示一个配置屏幕,你可以在此定义摄像机的品牌/型号和其他参数,包括你想要的图片重叠度、镜头尺寸等。DO_SET_CAM_TRIGG_DIST 会根据这些信息自动计算!
点击"接受"后,Mission Planner 将生成一份航点列表,其中包括指定区域内的起飞和着陆航点。调用 DO_SET_CAM_TRIGG_DIST 命令可设置任务期间两次相机触发之间的距离(以米为单位)。任务结束时,DO_SET_CAM_TRIGG_DIST 会被再次调用,将参数设置回零(停止捕捉图像)。
带有航点和摄像机触发器的最终任务看起来是这样的:

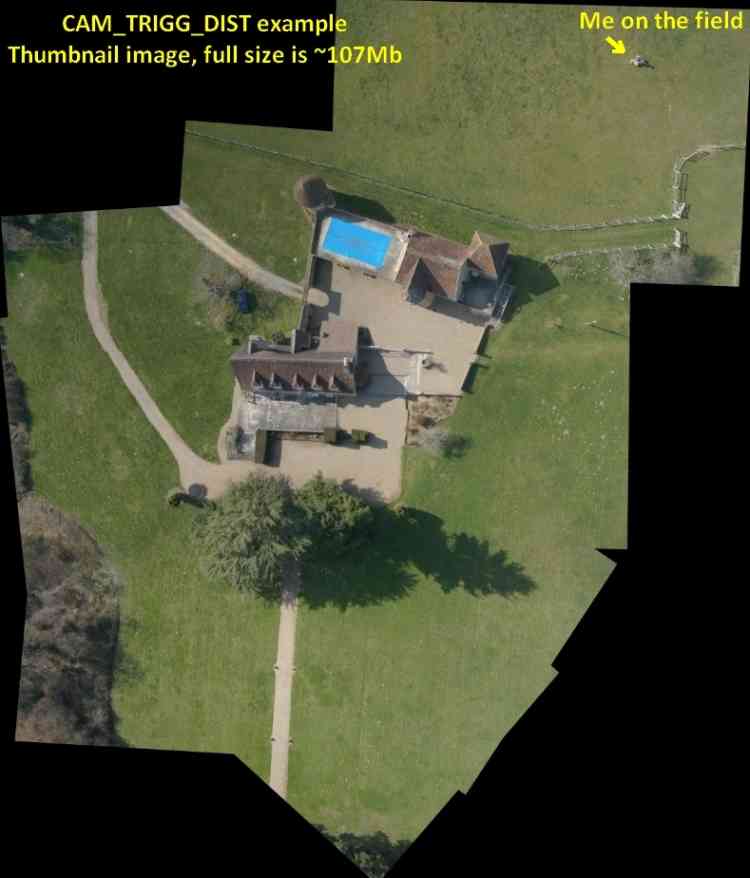
运行了上图所示的测试任务。它生成了 15 幅图像,并将其拼接在一起。下面是合成图像的缩略图(因为全尺寸图像太大,约 107MB)。
6.3.3 创建合成图像
有许多制作合成图像的免费和付费工具:
- Pix4Dmapper — 免费的"探索"版本支持图像合并;
- Microsoft 图像合成编辑器(ICE)(Microsoft Image Composite Editor (ICE))。