- 引入
- TD learing of state values
- TD learing of action values Sarsa
- TD learing of action values Expected Sarsa
- TD learing of action values n-step Sarsa
- TD learing of optimal action values:Q-learning
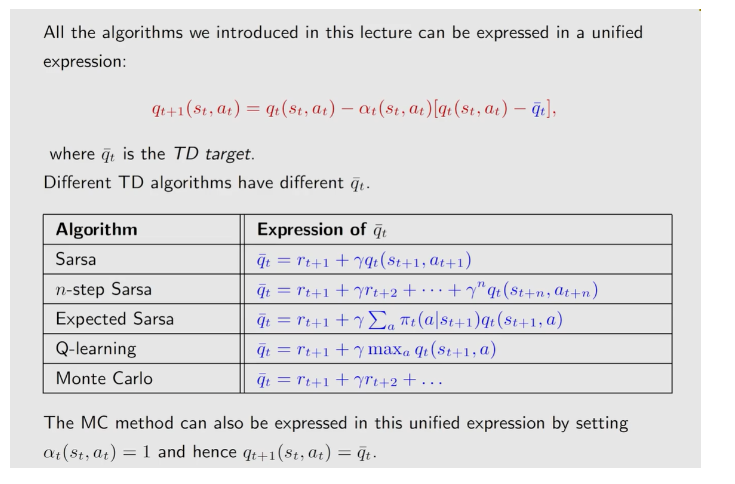
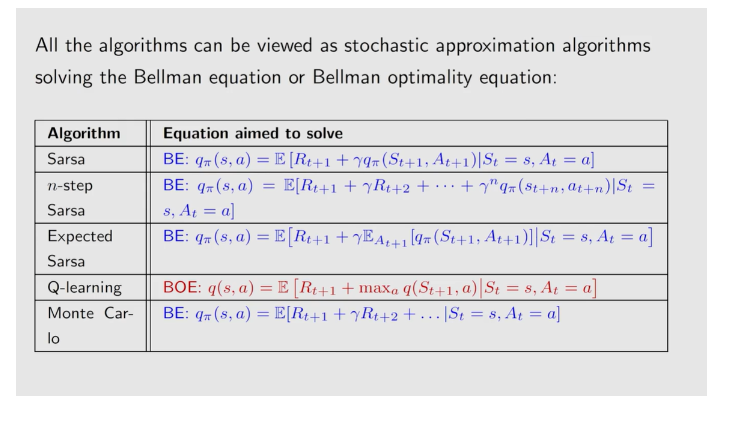
- a unified point of view
引入



这三个例子是层层递进的,都可以用\(RM\)算法去解决
TD learing of state values
这个算法是求解给定策略\(\pi\)的\(state \; value\),为什么求解\(state \; value\)其实就又回到了之前的\(PE\),有了\(state \; value\)就可进行\(policy \; improvement\)
\(TD \; learning\)是指的一类强化学习算法。
\(TD \; learning\)也是一种\(model \; free\)的算法他也是依赖于\(data\)
\(TD \;\)算法需要的数据有\((s_0,r_1,s_1,...,s_t,r_{t+1},s_{t+1},...)\),表示成另一种形式就是\((s_t,r_{t+1},s_{t+1})\)这些数据的生成依赖于给定的策略\(\pi\)
下面是\(TD\)算法的形式
\(where \; t = 0,1,2,...\),这里\(v_t(s_t)\)是\(state \; value \; v_{\pi}(s_t)\)的估计
\(\alpha_t(s_t)\)是状态\(s_t\)在\(t\)时刻的学习率
- 在\(t\)时刻,只有被\(visited\)的\(state \; s_t\)被更新,而其他未被访问的\(states \; s \neq s_t\)保持不变
- 一般第二个式子很多地方都会省略,但这里写出来更清楚

- \(TD \; target \;\):\(\bar{v_t}r_{t+1} +\gamma v(s_{t+1})\)实际上希望\(v_t\)朝着\(TD \; target\)的方向去改进
- \(TD \; error \;\)\(\delta_t = v(s_t)-[r_{t+1}+\gamma v_t(s_{t+1})] = v(s_t) - \bar{v_t}\)
为什么把\(\bar{v_t}\)叫做\(TD \; target ?\)
这是因为算法是要将\(v(s_t)\)朝着\(\bar{v_t}\)的方向改进,也就是说下一个时刻 \(v(s_t)\)离\(\bar{v_t}\)会更接近,所以\(\bar{v_t}\)叫做\(TD \; target\)
对上面的方程进行等价变形
上面的方程在描述一件事情:\(v_t\)和\(\bar{v_t}\)之间差的变化,左边是\(t+1\)时刻的,右边是\(t\)时刻的.
对上面方程两边求绝对值.
因为\(\alpha_t(s_t)\)是一个比较小的正数,所以\(0<1-\alpha_t(s_t)<1\)
所以就有:
上面的式子就说明在下一个时刻\(t+1\),\(v(s_t)\)离\(\bar{v_t}\)的距离更近了,所以这个算法就是把\(v_t(s_t)\)朝着\(\bar{v_t}\)的方向改进.
如何理解\(TD \; error\)
- 描述在两个时刻上面的\(difference\)
- 描述\(v_{\pi}和v_{t}\)之间的误差,也就是说当\(v_t=v_{\pi}\)时\(\delta_t=0\),反过来说当\(\delta_t\neq0\)时,\(v_t \neq v_{\pi}\)

上面的\(TD\)算法仅仅能用来估计\(state \; value\),不能直接估计\(action \; value\),同时也不能找到\(optimal \; policies\)
TD learing of action values Sarsa
\(Sarsa\)算法及其变形在做的事情是给定一个策略能够估计出来一个\(action \; value\),这也是\(policy \; evaluation \; (PE)\)的过程,然后再结合\(policy \; improvement \; (PE)\)就可以找到最优策略.
\(First\),给定一个\(policy \; \pi\)去估计\(action \; value\)
假设我们有一些\(experience \; \{(s_t, a_t, r_{t+1}, s_{t+1}, a_{t+1})\}_t\)
有了上面的\(experience\),我们就可以进行算法了
\(where \; t=0,1,2,...\)
- \(q_t(s_t,a_t)\)是\(q_{\pi}(s_t,a_t)\)的一个估计
- \(\alpha_t(s_t,a_t)\)是依赖于\((s_t,a_t)\)的学习率
\(sarsa\)算法是\(state \; action \; reward \; state \; action \;\)的首字母的缩写
\(sarsa\)算法和上面的\(TD \; learning\)基本上是一摸一样的,只不过是将对状态的估计,变成了对动作\((action \; value)\)的估计
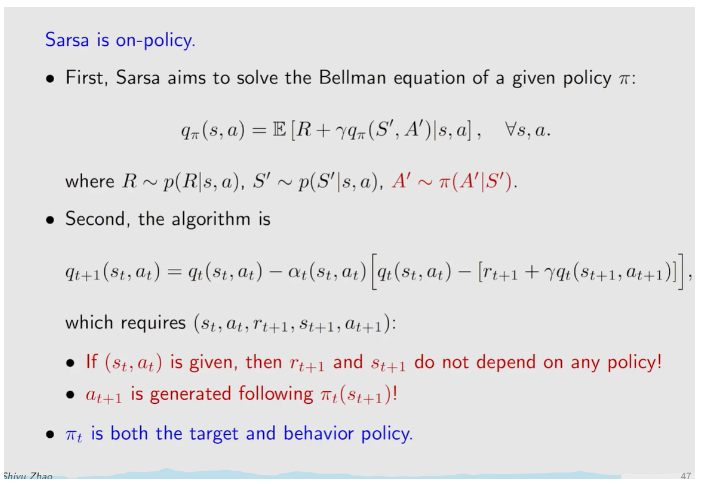
\(sarsa\)实际上也是在求解一个贝尔曼公式,只不过这个贝尔曼公式的形式和\(TD \; learning\)中的贝尔曼公式的形式不同
和之前使用\(state \; value\)不同的是,这个贝尔曼期望方程是使用\(action \; value\)来表示的,刻画了不同的\(action \; value\)之间的关系.
上面算法只是对\(action \; value\)进行求解,为了找到最优策略,还需要进行\(policy \; improvement(PE)\)
实际上\(Sarsa\)算法通常就指的是将\(Sarsa\)和\(policy \; improvement \; step\)

注意上面\(policy \; improvement\)是采用的之前内容中的\(\epsilon-gready\)算法
关于传统的\(Policy \; iteration\)和广义的\(GPI\)

TD learing of action values Expected Sarsa
这个算法和下面的\(n-step \; sarsa\)算法实际上是没有那么重要的,但是从一个经典算法出发,然后去推广改进,这种思路对于做研究来说是非常常见的

相比于原始的\(sarsa\),需要计算期望,也就需要更大的计算量,但是随机性减少了
TD learing of action values n-step Sarsa
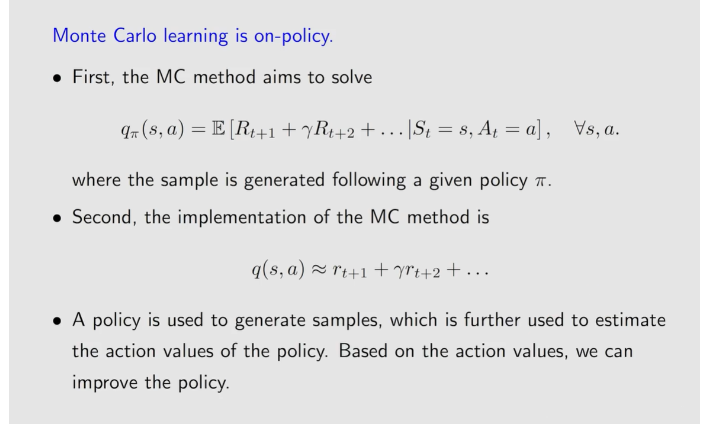
\(n-step \; Sarsa\)包含了\(Sarsa\)和\(Monte \; Carlo \; learning\)两种方法
先复习一下\(action \; value\)的定义
\(discounted \; return\)的写法有很多种形式
\(Sarsa \leftarrow G_t^{(1)} = R_{t+1}+ \gamma q_{\pi}(S_{t+1}+A_{t+1})\)

- \(n-step \; sarsa\)所需要的数据既不像\(sarsa\)那样只需要前面5个\((s_t, a_t,r_{t+1},s_{t+1},a_{t+1})\)也不像\(MC\)那样需要整个\(episode\)d额全部,而是只需要中间一部分
- 存在问题,在\(t\)时刻是不知道后面\((r_{t+n},s_{t+n}, a_{t+n})\)的,在t时刻虽然得到了一些数据,但是不不能立刻去更新,而是需要等待,等待需要的数据都收集到,才能进行更新
\(online\)和\(offline\),\(MC\)方法是\(offline\)的,\(Sarsa\)是\(online\)
而\(n-step \; sarsa\)是一种特殊的\(onlilne\)的

TD learing of optimal action values:Q-learning
终于结束了\(Sarsa\)来到了大名鼎鼎的\(Q-learning\)
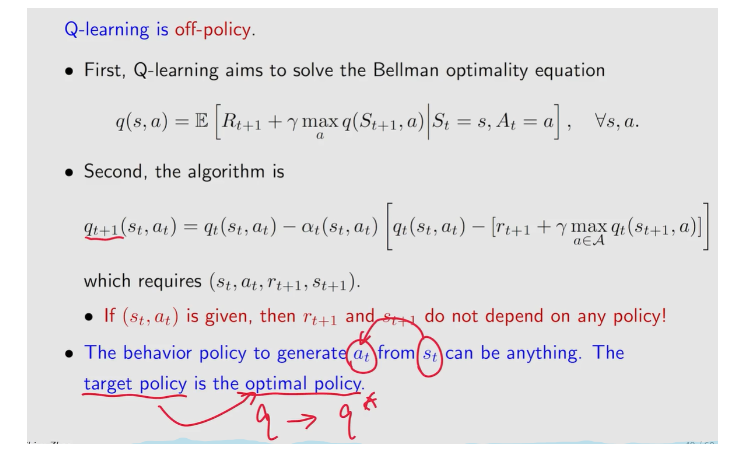
\(Q-learning\)是直接估计\(optimal \; action \; value\)不需要去做\(policy \; evaluation\)和\(policy \; improvement\),而是能直接去估计最优的\(action \; value\)
下面是\(Q-learning \; algorithm :\)
\(Q-learning\)和\(Sarsa\)非常相似,它们之间的区别仅仅在于\(TD \; target\)不同
\(Q-learning\)中\(TD \; target\)是\(r_{t+1} + \gamma \max_{a \in A}q(s_{t+1}, a)\)
\(Saras\)中的\(TD \; target\)是\(r_{t+1}+\gamma q_t(s_{t+1},a_{t+1})\)
\(Q-learning\)在数学上是在求解一个用\(action \; value\)表示的贝尔曼最优方程
上面的就是大名鼎鼎的\(Q-learning\)了,经过前面\(TD \; learning\)还有贝尔曼方程的铺垫,\(Q-learning\)理解起来就简单多了,下面是关于\(Q-leanring\)的一些性质
\(Off-policy\) \(vs\) \(on-policy\)
在\(TD \; learning\)中存在两个\(policy\)
- 一个是\(behavior \; policy\)是用来和环境交互生成\(experience \; samples\)的
- 另一个是\(target \; policy\)是用来不断朝着\(optimal \; policy\)去更新的
on-policy:\(behavior \; policy\)和\(target \; policy\)是相同的
off-policy:\(behavior \; policy\)和\(target \; policy\)是可以不相同的
\(Sarsa\)是一种\(on-policy\)的算法,而\(Q-learning\)是\(off-policy\)的算法

如何判断一个算法是\(on-policy\)还是\(off-policy\)的
- 看算法在解决什么数学问题
- 可以看执行算法需要什么东西
两种\(q-learning\)的算法伪代码


\(off-policy\)可以直接使用\(Gready\)是因为不需要用\(target \; policy\)去探索生成数据,因为生成数据是\(\pi_b\)的事情
a unified point of view