收集到一个话题,完整的飞行程序保护区是什么样子?
这个话题范围有点大,我尝试从一个具体的内容入手来聊一聊,比如PBN直线进场到直线复飞的完整保护区是什么样子。
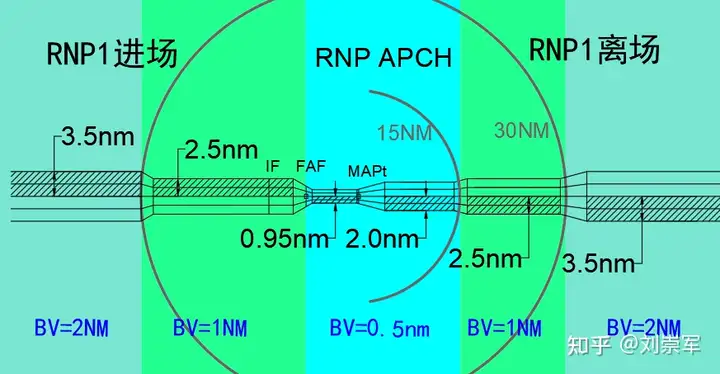
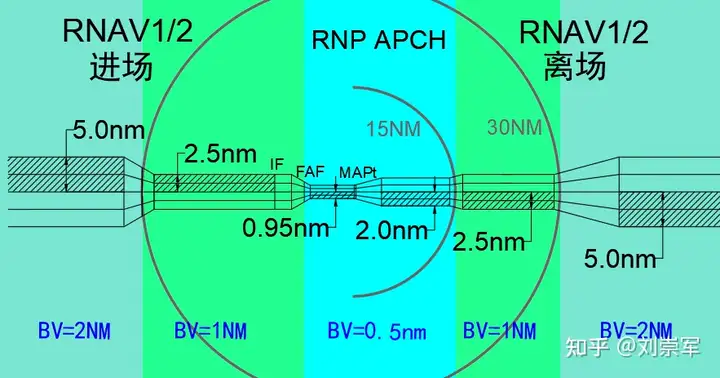
先上两张图,完全不考虑转弯的情况下,终端区内PBN保护区是下面的样子:
两张图看起来像是在玩“找不同”的游戏,事实上也确实如此。
这两张图里包含了下面的信息:
1、保护区半宽
由于直线段保护区是左右对称的,因此,飞行程序中常用“半宽”来描述保护区的宽度,常用1/2AW来表示,图中的宽度数字均为保护区的半宽。
2、导航规范与导航精度
PBN相关的导航规范种类很多,用在终端区范围内的主要有RNP1、RNAV1、RNAV2规范。不同的规范代表着不同的设备要求和导航精度要求。
RNP1、RNAV1代表导航精度在1.0nm以内,RNAV2则代表导航精度在2nm以内。
最后进近阶段,导航精度要求为0.3nm以内,导航规范以RNP APCH为主,部分机场使用RNP AR。前图中间浅蓝色部分是按照RNP APCH规范绘制的保护区。
RNAV2规范只支持进、离场和航路阶段,RNP1、RNAV1可以支持到中间进近航段和复飞航段,不支持最后进近航段。
3、缓冲值(Buffer Value)
在不同的航段上,采用不同的缓冲值(BV)用来对保护区宽度计算进行一个补充,具体的公式为1/2AW=1.5XTT+BV,XTT是偏航容差(侧向的最大允许误差),BV就是缓冲值。
对固定翼机型来说,BV值有三档,距机场ARP 30nm之外BV为2.0nm,最后进近及复飞15nm内时为0.5nm,其余为1nm。
当BV值发生变化或者导航精度的要求发生改变时,飞行程序的保护区半宽必须相应变化。进场、进近阶段外边界按照30°进行内收,复飞、离场阶段外边界按照15°进行外扩。
4、RNP1与RNAV1、RNAV2保护区宽度之间的差别
由于规范中的计算逻辑不同,计算结果却相同,导致RNAV1与RNAV2的保护区宽度完全相同。
在机场基准点(ARP)30nm以内的时候,无论RNP1还是RNAV1、RNAV2保护区的半宽都是相同的。所以,在前面两张图中,30nm圈内的保护区是完全相同的。
在机场基准点(ARP)30nm之外时,RNP1规范保护区半宽为3.5nm,RNAV1、RNAV2规范保护区半宽为5nm。越障标准都一样,平原需满足300米余度,山区300至600米余度。
复飞航段与离场航段保护区宽度从计算的角度来说是相似的,离场初始段保护区更窄一些。跑道末端位置处按照300米宽度计算,两侧15°外扩,达到2nm半宽后,若还是直线飞行,保护区就与前图中的复飞航段完全一样了。
总结一下,在机场ARP30nm以内时,RNP1、RNAV1、RNAV2保护区宽度的计算结果是相同的,进场半宽为2.5nm,离场半宽有2nm、2.5nm两种情况(以ARP15nm为界)。
当进场航空器偏离程序设计的航迹超出2.5nm(4.6km)时,属于脱离飞行程序保护区范围,此时需要在扇区最低安全高度或最低雷达引高度之上飞行才能确保安全越障。
今天就先聊这么多,后续计划结合一些机场案例,再多做一些图例来跟大家分享,欢迎提供话题素材,一起交流,下次再会!