XGO使用树莓派做为机器狗的大脑,推荐使用VScode对XGO进行编程,可以通过一下步骤进行开发:
准备工作
- 安装 VScode: 确保你已经在你的电脑上安装了 VScode。你可以从VScode官网下载并安装。
- 连接网络:根据快速入门让XGO连上网络,操作机器狗按键让机器狗显示IP地址如下图所示

在 VScode 中设置远程连接
- 安装 Remote Development 插件:
- 打开 VScode,点击左侧扩展(Extensions)图标。
- 搜索并安装Remote - SSH扩展。
- 配置 SSH 连接:
- 在VScode中按 Ctrl+Shift+P 打开命令面板,输入Remote-SSH: Connect to Host...,然后选择Add New SSH Host...。
- 输入连接字符串,例如:
sh
复制代码
ssh pi@192.168.1.2其中pi是默认用户名,192.168.1.2是树莓派的IP地址。
- 接下来会提示输入SSH密码,输入你设置的密码,默认密码为pi
- 连接到树莓派:
- 在VScode中再次按 Ctrl+Shift+P,选择Remote-SSH: Connect to Host...,然后选择刚刚添加的主机。
- 成功连接后,VScode会重新启动并连接到树莓派的远程环境。
在树莓派上编写和调试代码
- 打开文件夹:
- 在VScode中,通过文件菜单选择Open Folder...,选择你想在树莓派上操作的目录。
- 安装必要的扩展:
- 根据你要编写的代码语言(例如Python、C++等),在VScode中安装相应的扩展(如Python、C++等)。
- 编写代码:
- 你现在可以像在本地一样,在VScode中编写代码,并通过终端运行和调试。
- 使用终端:
- VScode的终端会直接连接到树莓派的终端。你可以在VScode中打开终端(使用Ctrl+或View -> Terminal),并在其中执行树莓派上的命令。
示例:在树莓派上运行 Python 代码
- 创建 Python 文件:
- 在VScode中,创建一个新的Python文件,例如xgo.py。
- 编写代码:
pythonprint("Hello, Raspberry Pi!")- 运行代码:
- 在终端中运行以下命令:
python3 xgo.py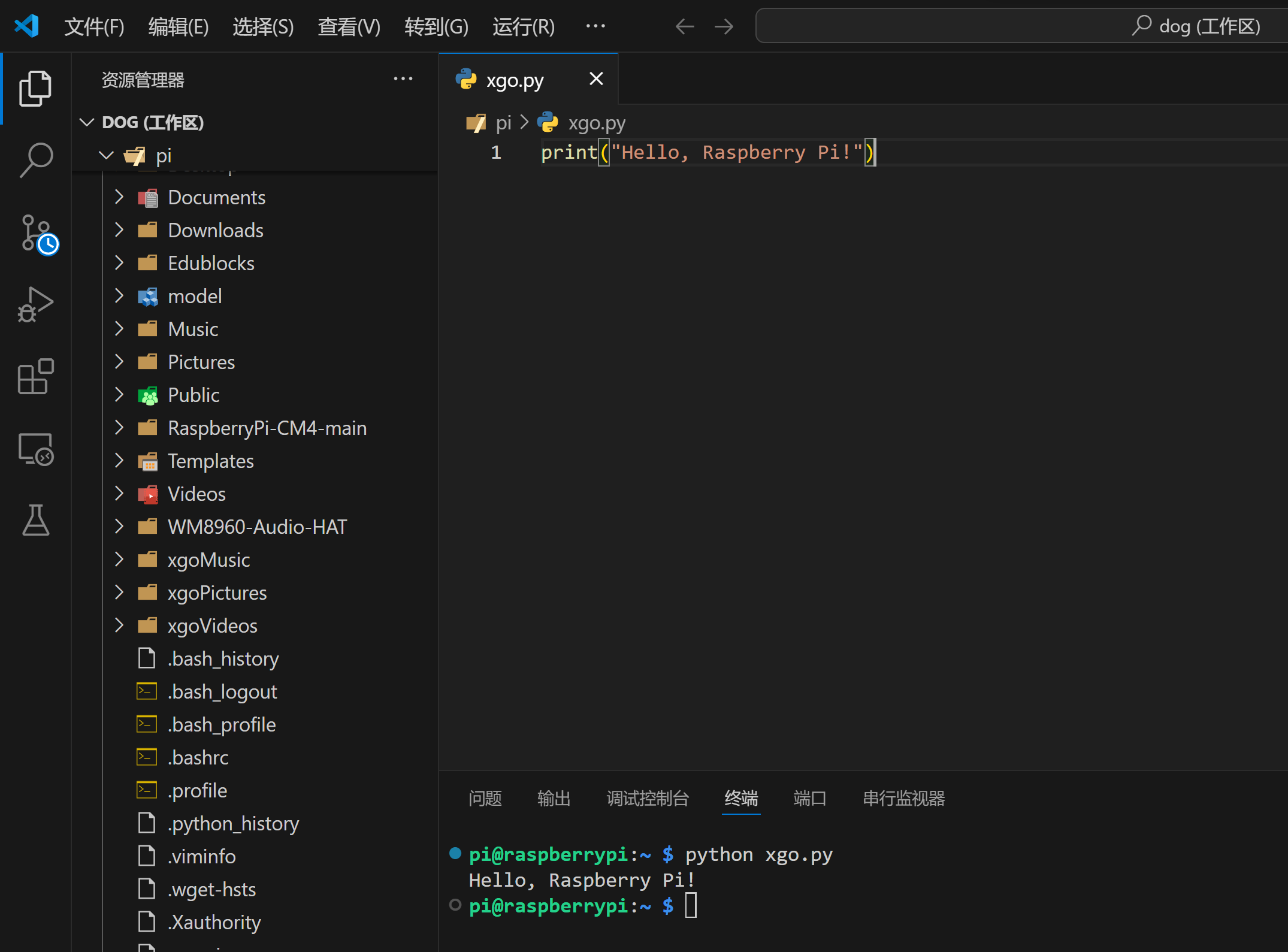
通过这些步骤,你就可以使用VScode对树莓派进行编程了。这种方法使你可以在舒适的桌面环境中编写代码,同时利用树莓派的硬件进行实际运行和测试。
Python库详解
XGO2内置了运动控制库文件xgolib.py,教育库xgoedu.py,开发者可以直接调用相关接口函数来控制机器狗。
通过命令安装xgo的python库
sudo pip install --upgrade xgo-pythonlib
pip install --upgrade xgo-pythonlib使用前确保\home\pi\model文件夹中包含所有的模型文件
全部模型文件可在https://github.com/Xgorobot/XGO-PythonLib的model文件夹中获取。
初始化
以下为初始化代码:
#导入xgolib
from xgolib import XGO
#实例化dog
dog = XGO("xgolite")判断狗的类型
由于xgolite与xgomni在运动性能和参数上有差异,为了准确控制狗的运动,可通过dog.read_firmware()函数检测机器狗的类型,示例代码:
from xgolib import XGO
dog = XGO("xgolite")
version=dog.read_firmware()
if version[0]=='M':print('XGO-MINI')dog = XGO("xgomini")dog_type='M'
else:print('XGO-LITE')dog_type='L'通过此段代码可以判断狗的类型,若变量dog_type为'M'则狗的类型为XGOMINI,若为'L'则类型为XGOLITE。
运动控制库介绍
移动相关方法
前后左右平移
move(direction, step)
|
参数名 |
格式 |
输入范围 |
说明 |
|
direction |
字符 |
'x'、'X'、'y'、'Y' |
'x'或'X'使机器狗前进或后退,'y'或'Y'使机器狗左移或者右移 |
|
step |
数字 |
x:[-25,25],y:[-18,18] |
该参数代表平移步长,根据方向,正值代表前进或左移,负值代表后退或右移。输入值超过范围时,按照极限值移动。 |
旋转
turn(step)
|
参数名 |
格式 |
输入范围 |
说明 |
|
step |
数字 |
[-150,150] |
该参数代表旋转速度,单位为°/s,正值为左转,负值为右转。 |
原地踏步,只适用于mini
mark_time(data)
|
参数名 |
格式 |
输入范围 |
说明 |
|
data |
数字 |
[10,35] |
该参数代表原地踏步抬腿高度,单位为mm,输入为0时停止原地踏步 |
改变迈步频率
pace(mode) 速度 = 步频 x 步幅
|
参数名 |
格式 |
输入范围 |
说明 |
|
|
mode |
字符串 |
['normal','slow','high'] |
该参数代表迈步频率,normal为默认步频,low为慢速步频,high为高速步频 |
停止移动
stop()
移动相关方法示例
#机器狗以18mm步长前进
dog.move('x',18)#机器狗以5mm步长右移
dog.move('y',-5)#下句代码可以正常执行,会以18mm左移
dog.move('Y',30)#机器狗以60°/s的速度左转
dog.turn(60)#机器狗以高速步频进行运动
dog.pace('high')#机器狗以25mm的抬腿高度进行原地踏步
dog.mark_time(25)#机器狗停止原地踏步
dog.mark_time(0)#机器狗停止移动
dog.stop()库中基于这些方法封装了一系列方法以便于使用。
|
方法名 |
说明 |
|
move_x(step) |
前后移动,相当于move('x', step) |
|
move_y(step) |
左右移动,相当于move('y', step) |
|
forward(step) |
前进,相当于move('x', abs(step)) |
|
back(step) |
后退,相当于move('x', -abs(step)) |
|
left(step) |
左移,相当于move('y', abs(step)) |
|
right(step) |
右移,相当于move('y', -abs(step)) |
|
turnleft(step) |
左转,相当于turn(abs(step)) |
|
turnright(step) |
右转,相当于turn(-abs(step)) |
位姿相关方法
调节位姿时,机器狗四条腿足端位置不发生改变,机身的位置或角度发生变化。
机身位置平移
translation(direction, data)
|
参数名 |
格式 |
输入范围 |
说明 |
|
direction |
单字符或字符列表 |
'x'、'y'、'z'或包含以上值的列表 |
'x'代表前后平移,'y'代表左右平移,'z'代表身高 |
|
data |
数字 |
x:[-35,35],y:[-18,18],z:[75,115] |
该参数代表机身位置平移距离,单位为mm |
机身姿态调整
attitude(direction, data)
|
参数名 |
格式 |
输入范围 |
说明 |
|
direction |
单字符或字符列表 |
'r'、'p'、'y'或包含以上值的列表 |
'r'代表滚转角,'p'代表俯仰角,'y'代表偏航角 |
|
data |
数字 |
r:[-20,20],p:[-15,15],y:[11,11] |
该参数代表机身姿态调节幅度,单位为° |
机身周期平移
periodic_tran(direction, period)
机器狗机身将以指定周期和方向进行往复平移,幅度为位置平移极限值的一半,可以同时进行多个方向的周期运动。机身周期运动和整机运动不可同时进行。
|
参数名 |
格式 |
输入范围 |
说明 |
|
direction |
单字符或字符列表 |
'x'、'y'、'z'或包含以上值的列表 |
'x'代表前后平移,'y'代表左右平移,'z'代表高低移动 |
|
period |
数字 |
[1.5,8] |
该参数代表运动周期,单位为s;输入0时代表停止运动 |
机身周期旋转
periodic_rot(direction, period)
|
参数名 |
格式 |
输入范围 |
说明 |
|
direction |
单字符或字符列表 |
'r'、'p'、'y'或包含以上值的列表 |
'r'代表滚转角,'p'代表俯仰角,'y'代表偏航角 |
|
period |
数字 |
[1.5,8] |
该参数代表运动周期,单位为s;输入0时代表停止运动 |
位姿相关方法示例
#机身向前平移18mm
dog.translation('x',18)#机身向右平移10mm,身高设置为100mm
#既可以输入单个值,也可以输入列表以控制多个方向的移动
dog.translation(['y','z'],[-10,100])#机身俯仰角设置为10°,偏航角设置为-4°,滚转角设置为8°
dog.attitude(['p','y','r'],[10,-4,8])#机身以3s的周期,进行前后往复平移
dog.periodic_tran('x',3)#机身以3s的周期进行滚转角往复转动,以7.4s周期进行偏航角往复转动
dog.periodic_rot(['r','y'],[3,7.4])#停止偏航角的往复转动
dog.periodic_rot('y',0)机械臂相关方法
设置机械臂末端位置
arm( arm_x, arm_z)
|
参数名 |
格式 |
输入范围 |
说明 |
|
arm_x |
float |
[-80, 155] |
单位为mm |
|
arm_z |
float |
[-95, 155] |
单位为mm |
此处的x和z是相对于机械臂的基座的坐标,单位为毫米。
设定超过机械臂工作空间的值时,机械臂会保持最后一个有效值对应的姿态,比如(155,0)对应的姿态是向前伸到最大,(0,155)对应向上伸到最大,(155,155)是斜向上最大,但是机械臂达不到这个位置,就会保持上一次发送的有效位置。
#机械臂末端位于基座正上方100mm处
dog.arm(0,100)#机械臂大臂垂直于身体,小臂水平于身体
dog.arm(90,90)#机械臂末端在摄像头正前方
dog.arm(100,0)#机械臂末端下探抓取
dog.arm(100,-60)
设置机械臂夹爪开合
claw(pos)
|
参数名 |
格式 |
输入范围 |
说明 |
|
pos |
uint_8 |
0-255 |
0对应完全张开,255对应完全闭合 |
设置机械臂是否开启稳定模式
arm_mode(mode)
|
参数名 |
格式 |
输入范围 |
说明 |
|
mode |
int |
0\1 |
0不开启,1开启 |
开启之后机械臂末端会不随着身体的平移而平移(平移指四脚站定躯干运动,而非前后左右迈步平移)。
其余方法
恢复初始状态
reset()
停止所有运动,所有状态全部恢复到初始状态
设置自稳状态
imu(mode)
自稳状态下,机器狗将自动调节姿态角以保持背部处于水平位置,不可在开启时手动设定姿态角。
|
参数名 |
格式 |
输入范围 |
说明 |
|
mode |
整数 |
0、1 |
0代表关闭、1代表开启 |
perform(mode)
表演模式,机器狗将循环执行预设的动作。
|
参数名 |
格式 |
输入范围 |
说明 |
|
mode |
整数 |
0、1 |
0代表关闭、1代表开启 |
单腿控制
leg(leg_id, data)
控制指定腿的足端位置
|
参数名 |
格式 |
输入范围 |
说明 |
|
leg_id |
整数 |
1、2、3、4 |
分别代表左前腿、右前腿、右后腿、左后腿 |
|
data |
长度为3的数字列表 |
x:[-35,35],y:[-18,18],z:[75,115] |
该参数代表足端位置,单位为mm |
其余方法示例
#设置右前腿足端坐标为(10mm,-12mm,90mm)
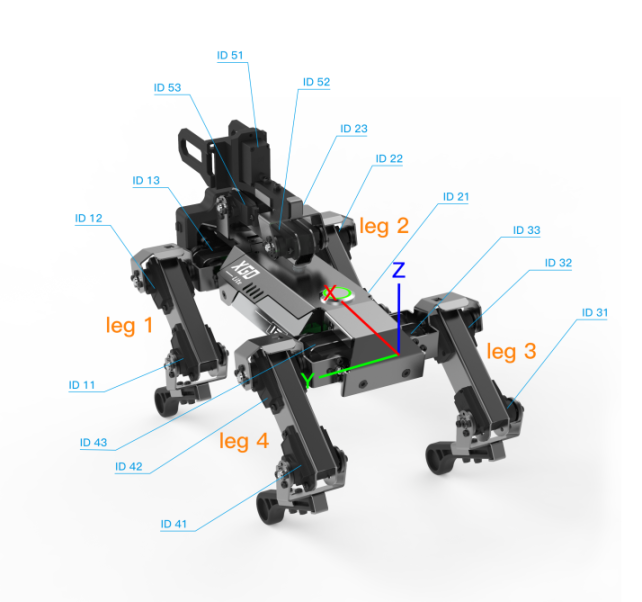
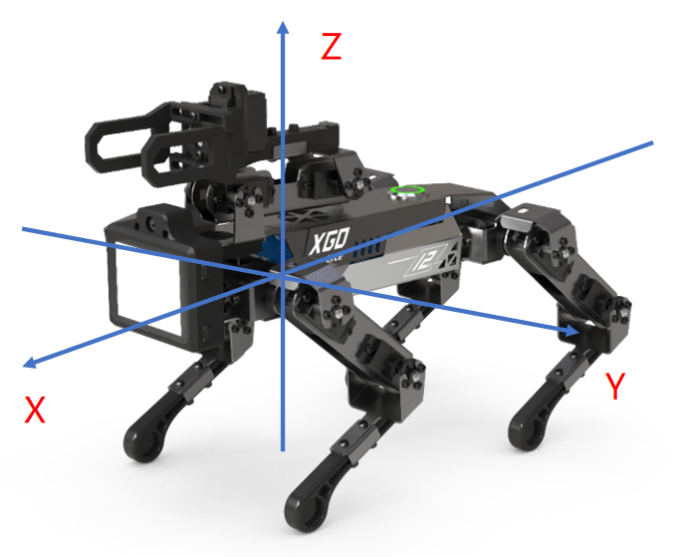
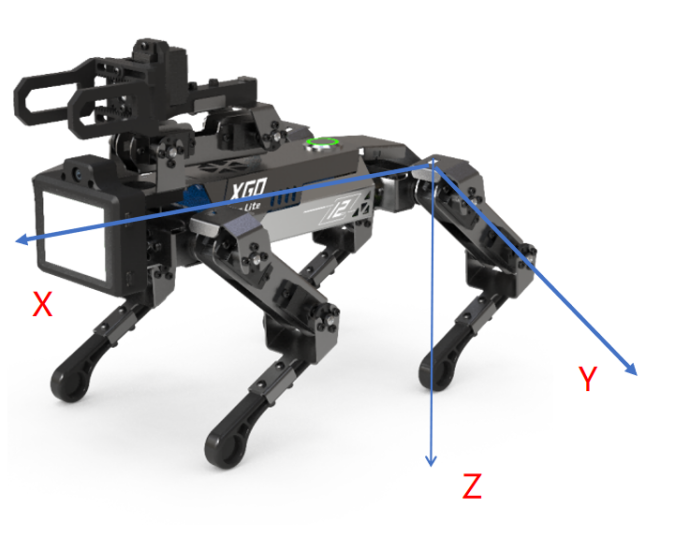
dog.leg(2,[10,-12,90])四条腿以各自肩部中间点为原点,前为X轴正方向,左为Y轴正方向,下为Z轴的方向
舵机控制
motor(motor_id, data)
控制舵机旋转角度
|
参数名 |
格式 |
输入范围 |
说明 |
|
motor_id |
整数或整数列表 |
[11,12,13,21,22,23,31,32,33,41,42,43,51,52,53] |
第一位数字代表舵机所在的腿,第二位数字代表在该腿上的位置,从下到上依次是1,2,3 51、52、53分别是夹爪、小臂、大臂舵机 51推荐使用claw命令来控制比较直观 |
|
data |
数字或数字列表 |
Mini 下:[-73, 57], 中:[-66, 93], 上:[-31, 31] 51:[-65, 65] 52:[-85, 50] 53:[-75, 90] --------------- Lite 下:[-70, 50], 中:[-66, 93], 上:[-31, 31] 51:[-65, 65] 52:[-115, 70] 53:[-85, 100] |
该参数代表舵机角度位置,单位为° |
舵机示例
#设置右前腿中舵机转动角度为30°
dog.motor(22,30)#设置右前腿上舵机转动角度为10°,左后腿下舵机转动角度为-20°
dog.motor([23,41],[10,-20])单腿舵机卸载
unload_motor(leg_id)
使一条腿上的三个舵机卸载,不输出力矩,之后可以随意用手转动,一般用于编写动作
|
参数名 |
格式 |
输入范围 |
说明 |
|
leg_id |
整数 |
1,2,3,4 |
分别代表左前腿、右前腿、右后腿、左后腿 |
所有舵机卸载
unload_allmotor()
使所有舵机卸载,不输出力矩,可以随意用手转动
单腿舵机加载
load_motor(leg_id)
使一条腿上的三个舵机保持当前位置加载,输出力矩,之后不可以用手转动,一般用于编写动作
|
参数名 |
格式 |
输入范围 |
说明 |
|
leg_id |
整数 |
1,2,3,4 |
分别代表左前腿、右前腿、右后腿、左后腿 |
所有舵机加载
load_allmotor()
使所有舵机加载,输出力矩,机器狗回到默认站姿,之后不可以用手转动
设置舵机转动速度
motor_speed(speed)
调节舵机转动速度,适用于单独控制舵机的情况
|
参数名 |
格式 |
输入范围 |
说明 |
|
speed |
整数 |
[0,255] |
0为最低速,255为最高速 |
修改蓝牙名称
bt_rename(name)
重新修改蓝牙名称,调用该函数后蓝牙会断开链接
|
参数名 |
格式 |
输入范围 |
说明 |
|
name |
字符串 |
长度不大于10 |
机器狗的蓝牙名称格式为XGO_xxx,xxx为可修改部分,仅支持ascii码中的字符。 |
执行预设动作
action(action_id)
|
参数名 |
格式 |
输入范围 |
说明 |
|
action_id |
整数 |
[1,255] |
ID与动作对应关系见下表 |
|
ID |
动作 |
持续时间/s |
ID |
动作 |
持续时间/s |
ID |
动作 |
持续时间/s |
|
1 |
趴下 |
3 |
2 |
站起 |
3 |
3 |
匍匐前进 |
5 |
|
4 |
转圈 |
5 |
5 |
mini为踏步 |
4 |
6 |
蹲起 |
4 |
|
7 |
转动Roll |
4 |
8 |
转动Pitch |
4 |
9 |
转动Yaw |
4 |
|
10 |
三轴转动 |
7 |
11 |
撒尿 |
7 |
12 |
坐下 |
5 |
|
13 |
招手 |
7 |
14 |
伸懒腰 |
10 |
15 |
波浪 |
6 |
|
16 |
摇摆 |
6 |
17 |
乞讨 |
6 |
18 |
找食物 |
6 |
|
19 |
握手 |
10 |
20 |
鸡头 |
9 |
21 |
俯卧撑 |
8 |
|
22 |
张望 |
8 |
23 |
跳舞 |
6 |
24 |
调皮 |
7 |
|
128 |
上抓 |
10 |
129 |
中抓 |
10 |
130 |
下抓 |
10 |
|
144 |
上楼梯 |
12 |
备注:单机模式循环执行以上所有动作组,群控模式去除匍匐前进,转圈,踏步,乞讨,找食物。
备注:microblocks中去掉踏步
标定舵机位置
calibration(state)
如果开机后,某些关节出现了明显的位置偏差,可以调用该功能进行标定。其他情况请谨慎使用
|
参数名 |
格式 |
输入范围 |
说明 |
|
state |
整数 |
[0,1] |
1 进入标定状态,此时舵机卸力,然后将机器狗摆至标定状态,小腿与地面平行,大腿与躯干呈90°,躯干与地面平行;0 完成标定 |
读取相关方法
读取舵机角度
read_motor()
读取15个舵机的角度, 读取成功则返回长度为15的列表,对应编号[11,12,13,21,22,23,31,32,33,41,42,43,51,52,53]的舵机角度, 读取失败则返回空列表
读取电池电量
read_battery()
读取当前电池电量, 读取成功则返回1-100的整数,代表电池剩余电量百分比, 读取失败则返回0。
读取姿态角度
read_roll()
read_pitch()
read_yaw()
读取当前姿态角度,读取成功则浮点数,读取失败则返回0
XGO双轮足产品系列
初始化
以下为初始化代码:
#导入xgolib
from xgolib import XGO
#实例化dog
rider = XGO("xgorider")运动控制库介绍
移动相关方法
前后左右平移
rider_move_x(speed, runtime=0)
|
参数名 |
格式 |
输入范围 |
说明 |
|
speed |
float |
[-1.5,1.5] |
单位为0.5m/s,正值为前进,负值为后退 |
|
runtime |
float |
≥0 |
单位为0.5m/s,如果runtime为0,则轮足会一直以该速度运行。 如果runtime不为0,则运行指定时间后会停止。 |
旋转
rider_turn(speed, runtime=0)
|
参数名 |
格式 |
输入范围 |
说明 |
|
speed |
float |
[-360,360] |
单位为°/s,正值为逆时针,负值为顺时针 |
|
runtime |
float |
≥0 |
单位为s,如果runtime为0,则轮足会一直以该速度运行。 如果runtime不为0,则运行指定时间后会停止。 |
位姿相关方法
调节身高
rider_height(data)
|
参数名 |
格式 |
输入范围 |
说明 |
|
data |
float |
z:[75,115] |
该参数代表机身位置平移距离,单位为mm |
机身姿态调整
rider_roll(data)
|
参数名 |
格式 |
输入范围 |
说明 |
|
data |
float |
r:[-17,17] |
该参数代表机身姿态调节幅度,单位为° |
机身周期蹲起
rider_periodic_z(period)
|
参数名 |
格式 |
输入范围 |
说明 |
|
period |
数字 |
[2,4] |
该参数代表运动周期,单位为s;输入0时代表停止运动 |
机身周期左右晃动
rider_periodic_roll(period)
|
参数名 |
格式 |
输入范围 |
说明 |
|
period |
数字 |
[2,4] |
该参数代表运动周期,单位为s;输入0时代表停止运动 |
平衡模式
rider_balance_roll(mode)
自稳状态下,轮足将自动调节Roll以保持背部处于水平位置,不可在开启时手动设定姿态角,用于单边桥等左右两边高度不同的地形
|
参数名 |
格式 |
输入范围 |
说明 |
|
mode |
整数 |
0、1 |
0代表关闭、1代表开启 |
读取相关方法
恢复初始状态
rider_reset()
停止所有运动,所有状态全部恢复到初始状态,如果是倒地状态,调用该方法后会站起。
读取版本号
rider_read_firmware()
读取下位机固件的版本号,返回长度最大为10的字符串,如"R-1.2.3"
电池电量
rider_read_battery()
读取当前电池电量, 读取成功则返回1-100的整数,代表电池剩余电量百分比, 读取失败则返回0。
读取姿态角度
rider_read_roll()
rider_read_pitch()
rider_read_yaw()
读取当前姿态角度,读取成功则浮点数,读取失败则返回0
rider_read_imu_int16(direction)
读取姿态角度参数范围为["roll","pitch","yaw"],读取成功则int16类型整数角度,读取失败则返回0
其他方法
执行预设动作
rider_action(action_id,wait=False)
|
参数名 |
格式 |
输入范围 |
说明 |
|
action_id |
整数 |
[1,255] |
ID与动作对应关系见下表 |
|
wait |
布尔值 |
TRUE/FALSE |
是否延时等待动作做完 |
|
ID |
动作 |
持续时间/s |
ID |
动作 |
持续时间/s |
ID |
动作 |
持续时间/s |
|
1 |
左右摇摆 |
2 |
高低起伏 |
|
3 |
前进后退 |
| |
|
4 |
四方蛇形 |
|
5 |
升降旋转 |
|
6 |
圆周晃动 |
|
英文命名:
1.Rocking 2.Shfiting 3.Altitude vary 4.Zigzag 5.Lift&rotate 6.Trembling
rider_perform(mode)
表演模式,机器狗将循环执行预设的动作。
|
参数名 |
格式 |
输入范围 |
说明 |
|
mode |
整数 |
0、1 |
0代表关闭、1代表开启 |
标定舵机位置
rider_calibration(state)
如果开机后,某些关节出现了明显的位置偏差,可以调用该功能进行标定。其他情况请谨慎使用
|
参数名 |
格式 |
输入范围 |
说明 |
|
state |
整数 |
[0,1] |
1 进入标定状态,此时舵机卸力,将轮足扶正,将腿降低至最低,然后向后倚靠在地面上,然后发送0完成标定 |
修改蓝牙名称
rider_bt_rename(name)
重新修改蓝牙名称,调用该函数后蓝牙会断开链接
|
参数名 |
格式 |
输入范围 |
说明 |
|
name |
字符串 |
长度不大于10 |
蓝牙名称格式为XGORider_xxx,xxx为可修改部分,仅支持ascii码中的字符。 |
设定静止时背部LED灯色彩
rider_led(index, color)
双轮足
参数名
格式
输入范围
说明
index
uint8
1-4
左上,左下,右下,右上分别为1、2、3、4号LED
color
[uint8, uint8, uint8]
0-255
写入三个字节数据,数值范围为0-255,代表RGB的亮度,[0,0,0]代表灭,[255,255,255]代表最亮的白光
教育库介绍
XGO的教育库主要是给出了集成在AI模组中的摄像头,屏幕,按键,麦克风和喇叭等硬件的Python接口。以及部分AI模型调用等功能。
初始化
以下为初始化代码:
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()屏幕绘图
需要先杀掉自启动main.py进程,否则会屏幕刷新冲突
sudo ps -ef | grep main.py
画直线
lcd_line(x1,y1,x2,y2,color=(r,g,b),width=width)
|
参数名 |
格式 |
输入范围 |
说明 |
|
x1,y1,x2,y2 |
数字 |
x1 x2:[0,320] y1 y2:[0,240] |
x1,y1为初始点标 x2,y2为终止点坐标 |
|
color(可缺省) 默认为白色 |
rgb元组 |
r g b:[0,255] |
color为线颜色 |
|
width(可缺省) 默认为2 |
数字 |
|
width为线宽 |
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()
XGO_edu.lcd_line(80,80,150,150,color=(255,0,0),width=2)
画圆形
lcd_round(center_x, center_y, radius, color=(255, 255, 255), width=2)
|
参数名 |
格式 |
输入范围 |
说明 |
|
center_x center_y |
数字 |
center_x:[0,320] center_x:[0,240] |
center_x,center_y为圆心坐标 |
|
raduius |
数字 |
raduius为半径 |
|
|
color(可缺省) 默认为白色 |
rgb元组 |
r g b:[0,255] |
color为圆弧颜色 |
|
width(可缺省) 默认为2 |
数字 |
|
width为圆弧宽 |
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()
XGO_edu.lcd_round(30,30,10,color=(255,0,0),width=2)画圆弧
lcd_arc(x1,y1,x2,y2,angle0,angle1,color=(255,255,255),width=2)
|
参数名 |
格式 |
输入范围 |
说明 |
|
x1,y1,x2,y2 |
数字 |
x1 x2:[0,320] y1 y2:[0,240] |
x1,y1,x2,y2为定义边界框的两个点 |
|
angle0,angle1 |
数字 |
angle0 angle1:[0,360] |
angle0为初始角度,三点钟方向为起始点,顺时针增加。 angle1为终止角度 |
|
color(可缺省) 默认为白色 |
rgb元组 |
r g b:[0,255] |
color为圆弧颜色 |
|
width(可缺省) 默认为2 |
数字 |
|
width为圆弧宽 |
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()
XGO_edu.lcd_arc(30,30,150,150,50,100,color=(255,0,0),width=2)画矩形
lcd_rectangle(x1,y1,x2,y2,fill=None,outline=(255,255,255),width=2)
|
参数名 |
格式 |
输入范围 |
说明 |
|
x1,y1,x2,y2 |
数字 |
x1 x2:[0,320] y1 y2:[0,240] |
x1,y1为初始点标 x2,y2为终止点坐标 |
|
fill(可缺省) 默认为None |
rgb元组 |
r g b:[0,255] |
fill为填充颜色 None则为不填充 |
|
outline(可缺省) 默认为白色 |
rgb元组 |
r g b:[0,255] |
outline为线颜色 |
|
width(可缺省) 默认为2 |
数字 |
|
width为线宽 |
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()
XGO_edu.lcd_rectangle(20,20,100,100,fill=None,outline=(255,0,0),width=2)显示文字
可显示中文与英文使用微软雅黑字体,字体大小可调节
lcd_text(x,y,content,color=(255,255,255),fontsize=15)
|
参数名 |
格式 |
输入范围 |
说明 |
|
x,y |
数字 |
x y:[0,320] |
x,y为初始点标 |
|
content |
字符串 |
content为显示内容 |
|
|
color(可缺省) 默认为白色 |
rgb元组 |
r g b:[0,255] |
color为文字颜色 |
|
fontsize(可缺省) 默认为15 |
数字 |
|
fontsize为字体大小 |
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()
XGO_edu.lcd_text(50,50,'hello',color=(255,0,0),fontsize=50)显示图片
lcd_picture(filename)
|
参数名 |
格式 |
说明 |
|
filename |
字符串 |
图片文件名需要加jpg扩展名 图片文件显示路径为/home/pi/xgoPictures,图片大小为320*240 |
清除屏幕
lcd_clear()
按键检测
xgoButton(button)
|
参数名 |
格式 |
输入范围 |
返回值 |
|
button |
指定字符串 |
["a","b"] |
False未按下 True按下 |
音视频功能
播放音频
xgoSpeaker(filename)
|
参数名 |
格式 |
输入范围 |
说明 |
|
filename |
字符串 |
音频文件扩展名wav,路径为/home/pi/xgoMusic |
播放视频
xgoVideo(filename)
|
参数名 |
格式 |
输入范围 |
说明 |
|
filename |
字符串 |
视频文件扩展名mp4 路径为/home/pi/xgoVideos |
录制音频
xgoAudioRecord(filename="record",seconds=5)
|
参数名 |
格式 |
输入范围 |
说明 |
|
filename(可缺省) 默认"record" |
字符串 |
录制音频的文件名 会自动添加扩展名wav,录制的文件路径为/home/pi/xgoMusic |
|
|
seconds(可缺省) 默认为5 |
数字 |
|
录制文件的长度(秒) |
摄像头功能
摄像头
xgoCamera(status)
|
参数名 |
格式 |
输入范围 |
说明 |
|
status |
布尔值 |
True,False |
打开和关闭摄像头,屏幕会实时显示视频流 |
录制视频
xgoVideoRecord(filename="record",seconds=5)
|
参数名 |
格式 |
输入范围 |
说明 |
|
filename(可缺省) 默认"record" |
字符串 |
录制视频的文件名 会自动添加扩展名mp4,录制的文件路径为/home/pi/xgoVideos |
|
|
seconds(可缺省) 默认为5 |
数字 |
|
录制文件的长度(秒) |
拍摄照片
xgoTakePhoto(filename="photo")
|
参数名 |
格式 |
输入范围 |
说明 |
|
filename(可缺省) 默认"photo." |
字符串 |
拍摄照片的文件名 会自动添加扩展名jpg,图片保存路径为/home/pi/xgoPictures 注意:使用此函数会自动运行xgoCamera(True),如不需要实时显示摄像头画面,请在此函数后面加上xgoCamera(False) |
AI功能
此系列的api核心功能是调取一帧图像进行分析并返回结果,可在参数传入图片的路径,实现对单张图片的检测。如需实时分析摄像头画面,请配合while使用,下面为示例代码:
手势识别单张图片:
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()#对同级目录下的camera.jpg进行手势识别
result=XGO_edu.gestureRecognition("camera.jpg")
#打印识别结果
print(result)实时通过摄像头进行手势识别:
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()#循环进行摄像头识别,按c键退出
while True:XGO使用树莓派做为机器狗的大脑,推荐使用VScode对XGO进行编程,可以通过一下步骤进行开发:
准备工作
- 安装 VScode: 确保你已经在你的电脑上安装了 VScode。你可以从VScode官网下载并安装。
- 连接网络:根据快速入门让XGO连上网络,操作机器狗按键让机器狗显示IP地址如下图所示
在 VScode 中设置远程连接
- 安装 Remote Development 插件:
- 打开 VScode,点击左侧扩展(Extensions)图标。
- 搜索并安装Remote - SSH扩展。
- 配置 SSH 连接:
- 在VScode中按 Ctrl+Shift+P 打开命令面板,输入Remote-SSH: Connect to Host...,然后选择Add New SSH Host...。
- 输入连接字符串,例如:
sh
复制代码
ssh pi@192.168.1.2其中pi是默认用户名,192.168.1.2是树莓派的IP地址。
- 接下来会提示输入SSH密码,输入你设置的密码,默认密码为pi
- 连接到树莓派:
- 在VScode中再次按 Ctrl+Shift+P,选择Remote-SSH: Connect to Host...,然后选择刚刚添加的主机。
- 成功连接后,VScode会重新启动并连接到树莓派的远程环境。
在树莓派上编写和调试代码
- 打开文件夹:
- 在VScode中,通过文件菜单选择Open Folder...,选择你想在树莓派上操作的目录。
- 安装必要的扩展:
- 根据你要编写的代码语言(例如Python、C++等),在VScode中安装相应的扩展(如Python、C++等)。
- 编写代码:
- 你现在可以像在本地一样,在VScode中编写代码,并通过终端运行和调试。
- 使用终端:
- VScode的终端会直接连接到树莓派的终端。你可以在VScode中打开终端(使用Ctrl+或View -> Terminal),并在其中执行树莓派上的命令。
示例:在树莓派上运行 Python 代码
- 创建 Python 文件:
- 在VScode中,创建一个新的Python文件,例如xgo.py。
- 编写代码:
pythonprint("Hello, Raspberry Pi!")- 运行代码:
- 在终端中运行以下命令:
python3 xgo.py
通过这些步骤,你就可以使用VScode对树莓派进行编程了。这种方法使你可以在舒适的桌面环境中编写代码,同时利用树莓派的硬件进行实际运行和测试。
Python库详解
XGO2内置了运动控制库文件xgolib.py,教育库xgoedu.py,开发者可以直接调用相关接口函数来控制机器狗。
通过命令安装xgo的python库
sudo pip install --upgrade xgo-pythonlib
pip install --upgrade xgo-pythonlib使用前确保\home\pi\model文件夹中包含所有的模型文件
全部模型文件可在https://github.com/Xgorobot/XGO-PythonLib的model文件夹中获取。
初始化
以下为初始化代码:
#导入xgolib
from xgolib import XGO
#实例化dog
dog = XGO("xgolite")判断狗的类型
由于xgolite与xgomni在运动性能和参数上有差异,为了准确控制狗的运动,可通过dog.read_firmware()函数检测机器狗的类型,示例代码:
from xgolib import XGO
dog = XGO("xgolite")
version=dog.read_firmware()
if version[0]=='M':print('XGO-MINI')dog = XGO("xgomini")dog_type='M'
else:print('XGO-LITE')dog_type='L'通过此段代码可以判断狗的类型,若变量dog_type为'M'则狗的类型为XGOMINI,若为'L'则类型为XGOLITE。
运动控制库介绍
移动相关方法
前后左右平移
move(direction, step)
|
参数名 |
格式 |
输入范围 |
说明 |
|
direction |
字符 |
'x'、'X'、'y'、'Y' |
'x'或'X'使机器狗前进或后退,'y'或'Y'使机器狗左移或者右移 |
|
step |
数字 |
x:[-25,25],y:[-18,18] |
该参数代表平移步长,根据方向,正值代表前进或左移,负值代表后退或右移。输入值超过范围时,按照极限值移动。 |
旋转
turn(step)
|
参数名 |
格式 |
输入范围 |
说明 |
|
step |
数字 |
[-150,150] |
该参数代表旋转速度,单位为°/s,正值为左转,负值为右转。 |
原地踏步,只适用于mini
mark_time(data)
|
参数名 |
格式 |
输入范围 |
说明 |
|
data |
数字 |
[10,35] |
该参数代表原地踏步抬腿高度,单位为mm,输入为0时停止原地踏步 |
改变迈步频率
pace(mode) 速度 = 步频 x 步幅
|
参数名 |
格式 |
输入范围 |
说明 |
|
|
mode |
字符串 |
['normal','slow','high'] |
该参数代表迈步频率,normal为默认步频,low为慢速步频,high为高速步频 |
停止移动
stop()
移动相关方法示例
#机器狗以18mm步长前进
dog.move('x',18)#机器狗以5mm步长右移
dog.move('y',-5)#下句代码可以正常执行,会以18mm左移
dog.move('Y',30)#机器狗以60°/s的速度左转
dog.turn(60)#机器狗以高速步频进行运动
dog.pace('high')#机器狗以25mm的抬腿高度进行原地踏步
dog.mark_time(25)#机器狗停止原地踏步
dog.mark_time(0)#机器狗停止移动
dog.stop()库中基于这些方法封装了一系列方法以便于使用。
|
方法名 |
说明 |
|
move_x(step) |
前后移动,相当于move('x', step) |
|
move_y(step) |
左右移动,相当于move('y', step) |
|
forward(step) |
前进,相当于move('x', abs(step)) |
|
back(step) |
后退,相当于move('x', -abs(step)) |
|
left(step) |
左移,相当于move('y', abs(step)) |
|
right(step) |
右移,相当于move('y', -abs(step)) |
|
turnleft(step) |
左转,相当于turn(abs(step)) |
|
turnright(step) |
右转,相当于turn(-abs(step)) |
位姿相关方法
调节位姿时,机器狗四条腿足端位置不发生改变,机身的位置或角度发生变化。
机身位置平移
translation(direction, data)
|
参数名 |
格式 |
输入范围 |
说明 |
|
direction |
单字符或字符列表 |
'x'、'y'、'z'或包含以上值的列表 |
'x'代表前后平移,'y'代表左右平移,'z'代表身高 |
|
data |
数字 |
x:[-35,35],y:[-18,18],z:[75,115] |
该参数代表机身位置平移距离,单位为mm |
机身姿态调整
attitude(direction, data)
|
参数名 |
格式 |
输入范围 |
说明 |
|
direction |
单字符或字符列表 |
'r'、'p'、'y'或包含以上值的列表 |
'r'代表滚转角,'p'代表俯仰角,'y'代表偏航角 |
|
data |
数字 |
r:[-20,20],p:[-15,15],y:[11,11] |
该参数代表机身姿态调节幅度,单位为° |
机身周期平移
periodic_tran(direction, period)
机器狗机身将以指定周期和方向进行往复平移,幅度为位置平移极限值的一半,可以同时进行多个方向的周期运动。机身周期运动和整机运动不可同时进行。
|
参数名 |
格式 |
输入范围 |
说明 |
|
direction |
单字符或字符列表 |
'x'、'y'、'z'或包含以上值的列表 |
'x'代表前后平移,'y'代表左右平移,'z'代表高低移动 |
|
period |
数字 |
[1.5,8] |
该参数代表运动周期,单位为s;输入0时代表停止运动 |
机身周期旋转
periodic_rot(direction, period)
|
参数名 |
格式 |
输入范围 |
说明 |
|
direction |
单字符或字符列表 |
'r'、'p'、'y'或包含以上值的列表 |
'r'代表滚转角,'p'代表俯仰角,'y'代表偏航角 |
|
period |
数字 |
[1.5,8] |
该参数代表运动周期,单位为s;输入0时代表停止运动 |
位姿相关方法示例
#机身向前平移18mm
dog.translation('x',18)#机身向右平移10mm,身高设置为100mm
#既可以输入单个值,也可以输入列表以控制多个方向的移动
dog.translation(['y','z'],[-10,100])#机身俯仰角设置为10°,偏航角设置为-4°,滚转角设置为8°
dog.attitude(['p','y','r'],[10,-4,8])#机身以3s的周期,进行前后往复平移
dog.periodic_tran('x',3)#机身以3s的周期进行滚转角往复转动,以7.4s周期进行偏航角往复转动
dog.periodic_rot(['r','y'],[3,7.4])#停止偏航角的往复转动
dog.periodic_rot('y',0)机械臂相关方法
设置机械臂末端位置
arm( arm_x, arm_z)
|
参数名 |
格式 |
输入范围 |
说明 |
|
arm_x |
float |
[-80, 155] |
单位为mm |
|
arm_z |
float |
[-95, 155] |
单位为mm |
此处的x和z是相对于机械臂的基座的坐标,单位为毫米。
设定超过机械臂工作空间的值时,机械臂会保持最后一个有效值对应的姿态,比如(155,0)对应的姿态是向前伸到最大,(0,155)对应向上伸到最大,(155,155)是斜向上最大,但是机械臂达不到这个位置,就会保持上一次发送的有效位置。
#机械臂末端位于基座正上方100mm处
dog.arm(0,100)#机械臂大臂垂直于身体,小臂水平于身体
dog.arm(90,90)#机械臂末端在摄像头正前方
dog.arm(100,0)#机械臂末端下探抓取
dog.arm(100,-60)
设置机械臂夹爪开合
claw(pos)
|
参数名 |
格式 |
输入范围 |
说明 |
|
pos |
uint_8 |
0-255 |
0对应完全张开,255对应完全闭合 |
设置机械臂是否开启稳定模式
arm_mode(mode)
|
参数名 |
格式 |
输入范围 |
说明 |
|
mode |
int |
0\1 |
0不开启,1开启 |
开启之后机械臂末端会不随着身体的平移而平移(平移指四脚站定躯干运动,而非前后左右迈步平移)。
其余方法
恢复初始状态
reset()
停止所有运动,所有状态全部恢复到初始状态
设置自稳状态
imu(mode)
自稳状态下,机器狗将自动调节姿态角以保持背部处于水平位置,不可在开启时手动设定姿态角。
|
参数名 |
格式 |
输入范围 |
说明 |
|
mode |
整数 |
0、1 |
0代表关闭、1代表开启 |
perform(mode)
表演模式,机器狗将循环执行预设的动作。
|
参数名 |
格式 |
输入范围 |
说明 |
|
mode |
整数 |
0、1 |
0代表关闭、1代表开启 |
单腿控制
leg(leg_id, data)
控制指定腿的足端位置
|
参数名 |
格式 |
输入范围 |
说明 |
|
leg_id |
整数 |
1、2、3、4 |
分别代表左前腿、右前腿、右后腿、左后腿 |
|
data |
长度为3的数字列表 |
x:[-35,35],y:[-18,18],z:[75,115] |
该参数代表足端位置,单位为mm |
其余方法示例
#设置右前腿足端坐标为(10mm,-12mm,90mm)
dog.leg(2,[10,-12,90])四条腿以各自肩部中间点为原点,前为X轴正方向,左为Y轴正方向,下为Z轴的方向
舵机控制
motor(motor_id, data)
控制舵机旋转角度
|
参数名 |
格式 |
输入范围 |
说明 |
|
motor_id |
整数或整数列表 |
[11,12,13,21,22,23,31,32,33,41,42,43,51,52,53] |
第一位数字代表舵机所在的腿,第二位数字代表在该腿上的位置,从下到上依次是1,2,3 51、52、53分别是夹爪、小臂、大臂舵机 51推荐使用claw命令来控制比较直观 |
|
data |
数字或数字列表 |
Mini 下:[-73, 57], 中:[-66, 93], 上:[-31, 31] 51:[-65, 65] 52:[-85, 50] 53:[-75, 90] --------------- Lite 下:[-70, 50], 中:[-66, 93], 上:[-31, 31] 51:[-65, 65] 52:[-115, 70] 53:[-85, 100] |
该参数代表舵机角度位置,单位为° |
舵机示例
#设置右前腿中舵机转动角度为30°
dog.motor(22,30)#设置右前腿上舵机转动角度为10°,左后腿下舵机转动角度为-20°
dog.motor([23,41],[10,-20])单腿舵机卸载
unload_motor(leg_id)
使一条腿上的三个舵机卸载,不输出力矩,之后可以随意用手转动,一般用于编写动作
|
参数名 |
格式 |
输入范围 |
说明 |
|
leg_id |
整数 |
1,2,3,4 |
分别代表左前腿、右前腿、右后腿、左后腿 |
所有舵机卸载
unload_allmotor()
使所有舵机卸载,不输出力矩,可以随意用手转动
单腿舵机加载
load_motor(leg_id)
使一条腿上的三个舵机保持当前位置加载,输出力矩,之后不可以用手转动,一般用于编写动作
|
参数名 |
格式 |
输入范围 |
说明 |
|
leg_id |
整数 |
1,2,3,4 |
分别代表左前腿、右前腿、右后腿、左后腿 |
所有舵机加载
load_allmotor()
使所有舵机加载,输出力矩,机器狗回到默认站姿,之后不可以用手转动
设置舵机转动速度
motor_speed(speed)
调节舵机转动速度,适用于单独控制舵机的情况
|
参数名 |
格式 |
输入范围 |
说明 |
|
speed |
整数 |
[0,255] |
0为最低速,255为最高速 |
修改蓝牙名称
bt_rename(name)
重新修改蓝牙名称,调用该函数后蓝牙会断开链接
|
参数名 |
格式 |
输入范围 |
说明 |
|
name |
字符串 |
长度不大于10 |
机器狗的蓝牙名称格式为XGO_xxx,xxx为可修改部分,仅支持ascii码中的字符。 |
执行预设动作
action(action_id)
|
参数名 |
格式 |
输入范围 |
说明 |
|
action_id |
整数 |
[1,255] |
ID与动作对应关系见下表 |
|
ID |
动作 |
持续时间/s |
ID |
动作 |
持续时间/s |
ID |
动作 |
持续时间/s |
|
1 |
趴下 |
3 |
2 |
站起 |
3 |
3 |
匍匐前进 |
5 |
|
4 |
转圈 |
5 |
5 |
mini为踏步 |
4 |
6 |
蹲起 |
4 |
|
7 |
转动Roll |
4 |
8 |
转动Pitch |
4 |
9 |
转动Yaw |
4 |
|
10 |
三轴转动 |
7 |
11 |
撒尿 |
7 |
12 |
坐下 |
5 |
|
13 |
招手 |
7 |
14 |
伸懒腰 |
10 |
15 |
波浪 |
6 |
|
16 |
摇摆 |
6 |
17 |
乞讨 |
6 |
18 |
找食物 |
6 |
|
19 |
握手 |
10 |
20 |
鸡头 |
9 |
21 |
俯卧撑 |
8 |
|
22 |
张望 |
8 |
23 |
跳舞 |
6 |
24 |
调皮 |
7 |
|
128 |
上抓 |
10 |
129 |
中抓 |
10 |
130 |
下抓 |
10 |
|
144 |
上楼梯 |
12 |
备注:单机模式循环执行以上所有动作组,群控模式去除匍匐前进,转圈,踏步,乞讨,找食物。
备注:microblocks中去掉踏步
标定舵机位置
calibration(state)
如果开机后,某些关节出现了明显的位置偏差,可以调用该功能进行标定。其他情况请谨慎使用
|
参数名 |
格式 |
输入范围 |
说明 |
|
state |
整数 |
[0,1] |
1 进入标定状态,此时舵机卸力,然后将机器狗摆至标定状态,小腿与地面平行,大腿与躯干呈90°,躯干与地面平行;0 完成标定 |
读取相关方法
读取舵机角度
read_motor()
读取15个舵机的角度, 读取成功则返回长度为15的列表,对应编号[11,12,13,21,22,23,31,32,33,41,42,43,51,52,53]的舵机角度, 读取失败则返回空列表
读取电池电量
read_battery()
读取当前电池电量, 读取成功则返回1-100的整数,代表电池剩余电量百分比, 读取失败则返回0。
读取姿态角度
read_roll()
read_pitch()
read_yaw()
读取当前姿态角度,读取成功则浮点数,读取失败则返回0
XGO双轮足产品系列
初始化
以下为初始化代码:
#导入xgolib
from xgolib import XGO
#实例化dog
rider = XGO("xgorider")运动控制库介绍
移动相关方法
前后左右平移
rider_move_x(speed, runtime=0)
|
参数名 |
格式 |
输入范围 |
说明 |
|
speed |
float |
[-1.5,1.5] |
单位为0.5m/s,正值为前进,负值为后退 |
|
runtime |
float |
≥0 |
单位为0.5m/s,如果runtime为0,则轮足会一直以该速度运行。 如果runtime不为0,则运行指定时间后会停止。 |
旋转
rider_turn(speed, runtime=0)
|
参数名 |
格式 |
输入范围 |
说明 |
|
speed |
float |
[-360,360] |
单位为°/s,正值为逆时针,负值为顺时针 |
|
runtime |
float |
≥0 |
单位为s,如果runtime为0,则轮足会一直以该速度运行。 如果runtime不为0,则运行指定时间后会停止。 |
位姿相关方法
调节身高
rider_height(data)
|
参数名 |
格式 |
输入范围 |
说明 |
|
data |
float |
z:[75,115] |
该参数代表机身位置平移距离,单位为mm |
机身姿态调整
rider_roll(data)
|
参数名 |
格式 |
输入范围 |
说明 |
|
data |
float |
r:[-17,17] |
该参数代表机身姿态调节幅度,单位为° |
机身周期蹲起
rider_periodic_z(period)
|
参数名 |
格式 |
输入范围 |
说明 |
|
period |
数字 |
[2,4] |
该参数代表运动周期,单位为s;输入0时代表停止运动 |
机身周期左右晃动
rider_periodic_roll(period)
|
参数名 |
格式 |
输入范围 |
说明 |
|
period |
数字 |
[2,4] |
该参数代表运动周期,单位为s;输入0时代表停止运动 |
平衡模式
rider_balance_roll(mode)
自稳状态下,轮足将自动调节Roll以保持背部处于水平位置,不可在开启时手动设定姿态角,用于单边桥等左右两边高度不同的地形
|
参数名 |
格式 |
输入范围 |
说明 |
|
mode |
整数 |
0、1 |
0代表关闭、1代表开启 |
读取相关方法
恢复初始状态
rider_reset()
停止所有运动,所有状态全部恢复到初始状态,如果是倒地状态,调用该方法后会站起。
读取版本号
rider_read_firmware()
读取下位机固件的版本号,返回长度最大为10的字符串,如"R-1.2.3"
电池电量
rider_read_battery()
读取当前电池电量, 读取成功则返回1-100的整数,代表电池剩余电量百分比, 读取失败则返回0。
读取姿态角度
rider_read_roll()
rider_read_pitch()
rider_read_yaw()
读取当前姿态角度,读取成功则浮点数,读取失败则返回0
rider_read_imu_int16(direction)
读取姿态角度参数范围为["roll","pitch","yaw"],读取成功则int16类型整数角度,读取失败则返回0
其他方法
执行预设动作
rider_action(action_id,wait=False)
|
参数名 |
格式 |
输入范围 |
说明 |
|
action_id |
整数 |
[1,255] |
ID与动作对应关系见下表 |
|
wait |
布尔值 |
TRUE/FALSE |
是否延时等待动作做完 |
|
ID |
动作 |
持续时间/s |
ID |
动作 |
持续时间/s |
ID |
动作 |
持续时间/s |
|
1 |
左右摇摆 |
2 |
高低起伏 |
|
3 |
前进后退 |
| |
|
4 |
四方蛇形 |
|
5 |
升降旋转 |
|
6 |
圆周晃动 |
|
英文命名:
1.Rocking 2.Shfiting 3.Altitude vary 4.Zigzag 5.Lift&rotate 6.Trembling
rider_perform(mode)
表演模式,机器狗将循环执行预设的动作。
|
参数名 |
格式 |
输入范围 |
说明 |
|
mode |
整数 |
0、1 |
0代表关闭、1代表开启 |
标定舵机位置
rider_calibration(state)
如果开机后,某些关节出现了明显的位置偏差,可以调用该功能进行标定。其他情况请谨慎使用
|
参数名 |
格式 |
输入范围 |
说明 |
|
state |
整数 |
[0,1] |
1 进入标定状态,此时舵机卸力,将轮足扶正,将腿降低至最低,然后向后倚靠在地面上,然后发送0完成标定 |
修改蓝牙名称
rider_bt_rename(name)
重新修改蓝牙名称,调用该函数后蓝牙会断开链接
|
参数名 |
格式 |
输入范围 |
说明 |
|
name |
字符串 |
长度不大于10 |
蓝牙名称格式为XGORider_xxx,xxx为可修改部分,仅支持ascii码中的字符。 |
设定静止时背部LED灯色彩
rider_led(index, color)
双轮足
参数名
格式
输入范围
说明
index
uint8
1-4
左上,左下,右下,右上分别为1、2、3、4号LED
color
[uint8, uint8, uint8]
0-255
写入三个字节数据,数值范围为0-255,代表RGB的亮度,[0,0,0]代表灭,[255,255,255]代表最亮的白光
教育库介绍
XGO的教育库主要是给出了集成在AI模组中的摄像头,屏幕,按键,麦克风和喇叭等硬件的Python接口。以及部分AI模型调用等功能。
初始化
以下为初始化代码:
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()屏幕绘图
需要先杀掉自启动main.py进程,否则会屏幕刷新冲突
sudo ps -ef | grep main.py
画直线
lcd_line(x1,y1,x2,y2,color=(r,g,b),width=width)
|
参数名 |
格式 |
输入范围 |
说明 |
|
x1,y1,x2,y2 |
数字 |
x1 x2:[0,320] y1 y2:[0,240] |
x1,y1为初始点标 x2,y2为终止点坐标 |
|
color(可缺省) 默认为白色 |
rgb元组 |
r g b:[0,255] |
color为线颜色 |
|
width(可缺省) 默认为2 |
数字 |
|
width为线宽 |
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()
XGO_edu.lcd_line(80,80,150,150,color=(255,0,0),width=2)
画圆形
lcd_round(center_x, center_y, radius, color=(255, 255, 255), width=2)
|
参数名 |
格式 |
输入范围 |
说明 |
|
center_x center_y |
数字 |
center_x:[0,320] center_x:[0,240] |
center_x,center_y为圆心坐标 |
|
raduius |
数字 |
raduius为半径 |
|
|
color(可缺省) 默认为白色 |
rgb元组 |
r g b:[0,255] |
color为圆弧颜色 |
|
width(可缺省) 默认为2 |
数字 |
|
width为圆弧宽 |
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()
XGO_edu.lcd_round(30,30,10,color=(255,0,0),width=2)画圆弧
lcd_arc(x1,y1,x2,y2,angle0,angle1,color=(255,255,255),width=2)
|
参数名 |
格式 |
输入范围 |
说明 |
|
x1,y1,x2,y2 |
数字 |
x1 x2:[0,320] y1 y2:[0,240] |
x1,y1,x2,y2为定义边界框的两个点 |
|
angle0,angle1 |
数字 |
angle0 angle1:[0,360] |
angle0为初始角度,三点钟方向为起始点,顺时针增加。 angle1为终止角度 |
|
color(可缺省) 默认为白色 |
rgb元组 |
r g b:[0,255] |
color为圆弧颜色 |
|
width(可缺省) 默认为2 |
数字 |
|
width为圆弧宽 |
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()
XGO_edu.lcd_arc(30,30,150,150,50,100,color=(255,0,0),width=2)画矩形
lcd_rectangle(x1,y1,x2,y2,fill=None,outline=(255,255,255),width=2)
|
参数名 |
格式 |
输入范围 |
说明 |
|
x1,y1,x2,y2 |
数字 |
x1 x2:[0,320] y1 y2:[0,240] |
x1,y1为初始点标 x2,y2为终止点坐标 |
|
fill(可缺省) 默认为None |
rgb元组 |
r g b:[0,255] |
fill为填充颜色 None则为不填充 |
|
outline(可缺省) 默认为白色 |
rgb元组 |
r g b:[0,255] |
outline为线颜色 |
|
width(可缺省) 默认为2 |
数字 |
|
width为线宽 |
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()
XGO_edu.lcd_rectangle(20,20,100,100,fill=None,outline=(255,0,0),width=2)显示文字
可显示中文与英文使用微软雅黑字体,字体大小可调节
lcd_text(x,y,content,color=(255,255,255),fontsize=15)
|
参数名 |
格式 |
输入范围 |
说明 |
|
x,y |
数字 |
x y:[0,320] |
x,y为初始点标 |
|
content |
字符串 |
content为显示内容 |
|
|
color(可缺省) 默认为白色 |
rgb元组 |
r g b:[0,255] |
color为文字颜色 |
|
fontsize(可缺省) 默认为15 |
数字 |
|
fontsize为字体大小 |
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()
XGO_edu.lcd_text(50,50,'hello',color=(255,0,0),fontsize=50)显示图片
lcd_picture(filename)
|
参数名 |
格式 |
说明 |
|
filename |
字符串 |
图片文件名需要加jpg扩展名 图片文件显示路径为/home/pi/xgoPictures,图片大小为320*240 |
清除屏幕
lcd_clear()
按键检测
xgoButton(button)
|
参数名 |
格式 |
输入范围 |
返回值 |
|
button |
指定字符串 |
["a","b"] |
False未按下 True按下 |
音视频功能
播放音频
xgoSpeaker(filename)
|
参数名 |
格式 |
输入范围 |
说明 |
|
filename |
字符串 |
音频文件扩展名wav,路径为/home/pi/xgoMusic |
播放视频
xgoVideo(filename)
|
参数名 |
格式 |
输入范围 |
说明 |
|
filename |
字符串 |
视频文件扩展名mp4 路径为/home/pi/xgoVideos |
录制音频
xgoAudioRecord(filename="record",seconds=5)
|
参数名 |
格式 |
输入范围 |
说明 |
|
filename(可缺省) 默认"record" |
字符串 |
录制音频的文件名 会自动添加扩展名wav,录制的文件路径为/home/pi/xgoMusic |
|
|
seconds(可缺省) 默认为5 |
数字 |
|
录制文件的长度(秒) |
摄像头功能
摄像头
xgoCamera(status)
|
参数名 |
格式 |
输入范围 |
说明 |
|
status |
布尔值 |
True,False |
打开和关闭摄像头,屏幕会实时显示视频流 |
录制视频
xgoVideoRecord(filename="record",seconds=5)
|
参数名 |
格式 |
输入范围 |
说明 |
|
filename(可缺省) 默认"record" |
字符串 |
录制视频的文件名 会自动添加扩展名mp4,录制的文件路径为/home/pi/xgoVideos |
|
|
seconds(可缺省) 默认为5 |
数字 |
|
录制文件的长度(秒) |
拍摄照片
xgoTakePhoto(filename="photo")
|
参数名 |
格式 |
输入范围 |
说明 |
|
filename(可缺省) 默认"photo." |
字符串 |
拍摄照片的文件名 会自动添加扩展名jpg,图片保存路径为/home/pi/xgoPictures 注意:使用此函数会自动运行xgoCamera(True),如不需要实时显示摄像头画面,请在此函数后面加上xgoCamera(False) |
AI功能
此系列的api核心功能是调取一帧图像进行分析并返回结果,可在参数传入图片的路径,实现对单张图片的检测。如需实时分析摄像头画面,请配合while使用,下面为示例代码:
手势识别单张图片:
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()#对同级目录下的camera.jpg进行手势识别
result=XGO_edu.gestureRecognition("camera.jpg")
#打印识别结果
print(result)实时通过摄像头进行手势识别:
#导入xgoedu
from xgoedu import XGOEDU
#实例化edu
XGO_edu = XGOEDU()#循环进行摄像头识别,按c键退出
while True:result=XGO_edu.gestureRecognition() #缺省参数,默认使用摄像头识别print(result)if XGO_edu.xgoButton("c"): #c键按下退出循环break获取手势识别结果的具体内容:
from xgoedu import XGOEDU
XGO_edu = XGOEDU()
result=XGO_edu.gestureRecognition("camera.jpg")
#手势识别结果格式(ges,(x,y))
if result!=None: #先加结果是否为空的判断,否则会提示下标错误gesture=result[0] #获取手势识别结果(字符串)x=result[1][0] #获取x坐标(数值)y=result[1][1] #获取y坐标(数值)骨骼识别
posenetRecognition(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
[angle1,angle2,angle3,angle4] angle1、angle2 俩大臂和小臂之间的夹角 angle3、angle4 俩大臂和身体之间的夹角 |
手势识别手势识别
gestureRecognition(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
(ges,(x,y)) ges为手势识别结果 目前包括的手势有: ["1","2","3","4","5","Good","Ok","Rock","Stone"] 坐标值xy |
YOLO识别
yoloFast(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
(object,(x,y)) object为YOLO识别结果 目前包括的物体有: ['person','bicycle','car','motorbike','aeroplane','bus','train','truck','boat','trafficlight','firehydrant','stopsign','parkingmeter','bench','bird','cat','dog','horse','sheep','cow','elephant','bear','zebra','giraffe','backpack','umbrella','handbag','tie','suitcase','frisbee','skis','snowboard','sportsball','kite','baseballbat','baseballglove','skateboard','surfboard','tennisracket','bottle','wineglass','cup','fork','knife','spoon','bowl','banana','apple','sandwich','orange','broccoli','carrot','hotdog','pizza','donut','cake','chair','sofa','pottedplant','bed','diningtable','toilet','tvmonitor','laptop','mouse','remote','keyboard','cell phone','microwave','oven','toaster','sink','refrigerator','book','clock','vase','scissors','teddy bear','hair drier','toothbrush'] 坐标值xy |
人脸检测
face_detect(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
[x,y,w,h] 人脸识别框的 x坐标,y坐标,宽度,高度 |
情绪识别
emotion(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
(emotion,(x,y)) emotion包括: ['Angry','Happy','Neutral','Sad','Surprise'] 坐标值xy |
年龄性别识别
agesex(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
(gender,age,(x,y)) gender包括['Male', 'Female'] age包括['(0-2)', '(4-6)', '(8-12)', '(15-20)', '(25-32)', '(38-43)', '(48-53)', '(60-100)'] 坐标值xy |
语音识别(需要联网,离线不可用)
SpeechRecognition(seconds=3)
|
参数名 |
格式 |
说明 |
返回值 |
|
seconds(可缺省) 默认为3 |
数字 |
录制文件的长度(秒) 语句执行后,稍作停顿再讲话 |
识别结果字符串 |
语音合成(需要联网,离线不可用)
SpeechSynthesis(texts)
|
参数名 |
格式 |
说明 |
返回值 |
|
texts |
字符串 |
支持中文、英语及混用 |
无 会自动播放合成后的语音 |
二维码识别
QRRecognition(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
二维码识别结果 result 可以识别多个结果,返回值为列表 |
小球识别
BallRecognition(color_mask,target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 color为预设颜色 |
字符串 |
target为图像文件的路径 |
小球识别结果 ((x,y)) 返回圆心坐标 |
|
color_mask 获取颜色遮罩 |
需要函数cap_color_mask()获得 |
hsv颜色范围 |
实时获取特定颜色的小球轮廓:
from xgoedu import XGOEDU
XGO_edu = XGOEDU()
color=XGO_edu.cap_color_mask()
#通过api手动获取需要识别小球的颜色
while True:result=XGO_edu.BallRecognition(color) #填入获取的颜色print(result)if XGO_edu.xgoButton("c"): #c键按下退出循环break颜色识别
ColorRecognition(target="camera",mode='R')
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
颜色识别结果((x,y),r) 可以识别多个结果,返回值为列表 |
|
mode为预设颜色 |
固定值(字符串) RGBY对应红绿蓝黄 |
如选黄色则填入mode='Y' |
result=XGO_edu.gestureRecognition() #缺省参数,默认使用摄像头识别 print(result) if XGO_edu.xgoButton("c"): #c键按下退出循环 break获取手势识别结果的具体内容:
from xgoedu import XGOEDU
XGO_edu = XGOEDU()
result=XGO_edu.gestureRecognition("camera.jpg")
#手势识别结果格式(ges,(x,y))
if result!=None: #先加结果是否为空的判断,否则会提示下标错误gesture=result[0] #获取手势识别结果(字符串)x=result[1][0] #获取x坐标(数值)y=result[1][1] #获取y坐标(数值)骨骼识别
posenetRecognition(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
[angle1,angle2,angle3,angle4] angle1、angle2 俩大臂和小臂之间的夹角 angle3、angle4 俩大臂和身体之间的夹角 |
手势识别手势识别
gestureRecognition(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
(ges,(x,y)) ges为手势识别结果 目前包括的手势有: ["1","2","3","4","5","Good","Ok","Rock","Stone"] 坐标值xy |
YOLO识别
yoloFast(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
(object,(x,y)) object为YOLO识别结果 目前包括的物体有: ['person','bicycle','car','motorbike','aeroplane','bus','train','truck','boat','trafficlight','firehydrant','stopsign','parkingmeter','bench','bird','cat','dog','horse','sheep','cow','elephant','bear','zebra','giraffe','backpack','umbrella','handbag','tie','suitcase','frisbee','skis','snowboard','sportsball','kite','baseballbat','baseballglove','skateboard','surfboard','tennisracket','bottle','wineglass','cup','fork','knife','spoon','bowl','banana','apple','sandwich','orange','broccoli','carrot','hotdog','pizza','donut','cake','chair','sofa','pottedplant','bed','diningtable','toilet','tvmonitor','laptop','mouse','remote','keyboard','cell phone','microwave','oven','toaster','sink','refrigerator','book','clock','vase','scissors','teddy bear','hair drier','toothbrush'] 坐标值xy |
人脸检测
face_detect(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
[x,y,w,h] 人脸识别框的 x坐标,y坐标,宽度,高度 |
情绪识别
emotion(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
(emotion,(x,y)) emotion包括: ['Angry','Happy','Neutral','Sad','Surprise'] 坐标值xy |
年龄性别识别
agesex(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
(gender,age,(x,y)) gender包括['Male', 'Female'] age包括['(0-2)', '(4-6)', '(8-12)', '(15-20)', '(25-32)', '(38-43)', '(48-53)', '(60-100)'] 坐标值xy |
语音识别(需要联网,离线不可用)
SpeechRecognition(seconds=3)
|
参数名 |
格式 |
说明 |
返回值 |
|
seconds(可缺省) 默认为3 |
数字 |
录制文件的长度(秒) 语句执行后,稍作停顿再讲话 |
识别结果字符串 |
语音合成(需要联网,离线不可用)
SpeechSynthesis(texts)
|
参数名 |
格式 |
说明 |
返回值 |
|
texts |
字符串 |
支持中文、英语及混用 |
无 会自动播放合成后的语音 |
二维码识别
QRRecognition(target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
二维码识别结果 result 可以识别多个结果,返回值为列表 |
小球识别
BallRecognition(color_mask,target="camera")
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 color为预设颜色 |
字符串 |
target为图像文件的路径 |
小球识别结果 ((x,y)) 返回圆心坐标 |
|
color_mask 获取颜色遮罩 |
需要函数cap_color_mask()获得 |
hsv颜色范围 |
实时获取特定颜色的小球轮廓:
from xgoedu import XGOEDU
XGO_edu = XGOEDU()
color=XGO_edu.cap_color_mask()
#通过api手动获取需要识别小球的颜色
while True:result=XGO_edu.BallRecognition(color) #填入获取的颜色print(result)if XGO_edu.xgoButton("c"): #c键按下退出循环break颜色识别
ColorRecognition(target="camera",mode='R')
|
参数名 |
格式 |
说明 |
返回值 |
|
target(可缺省) 默认"camera" 即使用摄像头捕捉图像 |
字符串 |
target为图像文件的路径 |
颜色识别结果((x,y),r) 可以识别多个结果,返回值为列表 |
|
mode为预设颜色 |
固定值(字符串) RGBY对应红绿蓝黄 |
如选黄色则填入mode='Y' |