过年好,但我最近真的好想死,听说卡尔曼吕波很重要,为了让自己死得快一点来学学卡尔曼吕波,我对我接下来的半个月充满了绝望。
新年第一天就这么丧可不好,振作起来,人活着总要学会开开心心的,然后少管一些不开心的事情,其实别人也并没有很重要对不对,希望今年不要再做这些伤害自己的事情了。
然而我上学期没学线性代数,寄,我把公式扔在这就跑。
简易的理解
假如有一辆小车儿在路上行驶,你想给这个小车儿做定位,现在你有两种选择:
-
观测值:直接使用 GPS 定位,然而每次获取的位置都有随机误差。
-
估计值:通过之前的观察你发现这个小车儿正在做匀加速直线运动,并且你通过之前的数据推导出了它的速度和加速度,直接用速度和加速度计算出下一时刻的位置。
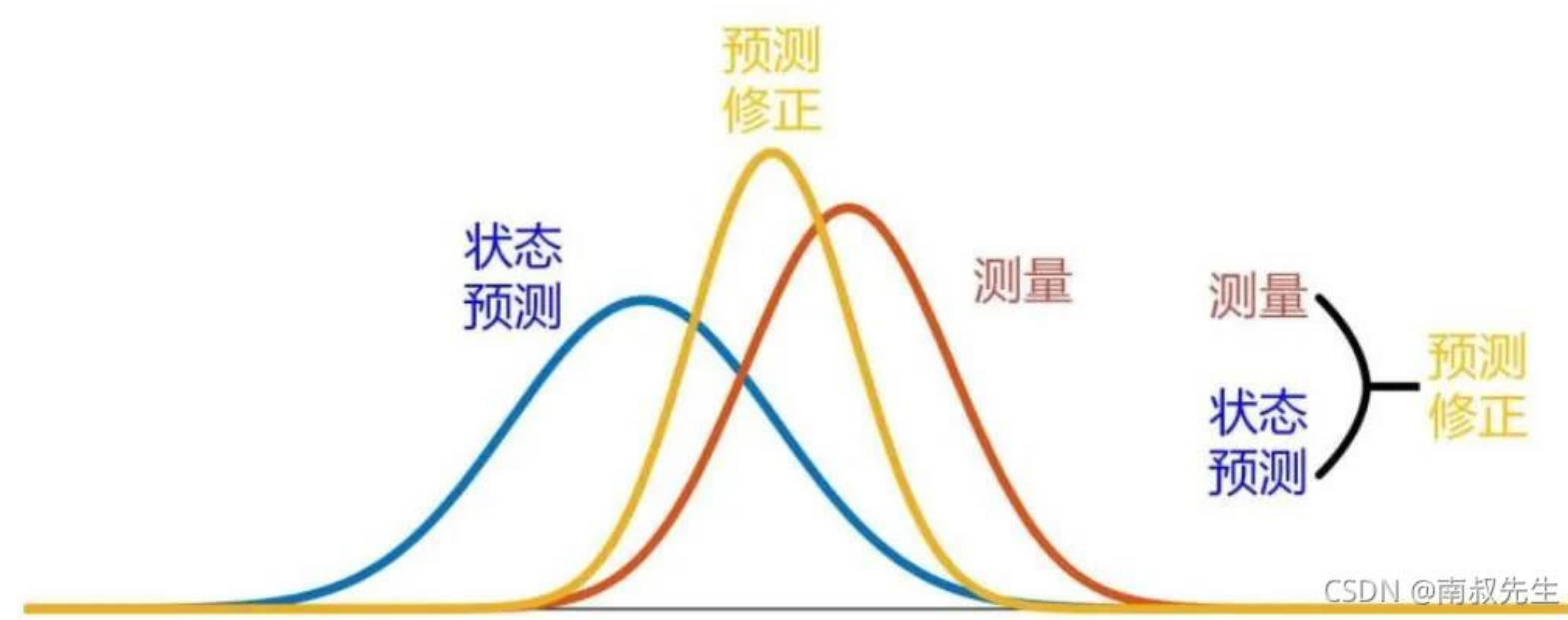
然而真实情况下小车儿也不一定严格做匀加速直线运动,你发现两种选择都有误差也有一定的可信度,你决定两边都信一点,于是你把 观测值 和 估计值 分别乘上一个(加和为 \(1\) 的)系数得到 最佳估计值,作为对小车儿真实位置的估计。
现在你要解决的问题是,系数怎么取比较优,或者说,每个时刻的系数分别怎么取比较优。
两边都有不确定性,我们可以认为这个不确定性成正态分布,y 表示真实值为 x 的概率(也就是说函数和 x 轴围成的面积为 \(1\))。
感性地想,肯定是谁的不确定性小谁的系数就取得更大一些。
设置状态
我们将小车儿在 \(t\) 时刻的状态表示为 \(x_t=\left[\begin{array}{c}p_t \\v_t\end{array}\right]\),其中 \(p_t\) 表示位置,\(v_t\) 表示速度。
那么就有 \(p_t=p_{t-1}+v_{t-1}\times \triangle t + u_{t-1}\times\frac{\triangle t^2} 2\),其中 \(u_t\) 表示 \(t\) 时刻的加速度,我们假设加速度是可以从驾驶员那里直接得到的。
以及 \(v_t=v_{t-1}+u_{t-1}\times\triangle t\)。
表示成矩阵:
豪德,那我们设
于是得到了简化版小车儿运动公式:\(x_t=F_t x_{t-1}+B_t u_{t-1}\)
那我们就可以用这个公式来计算估计值了,为了把估计值和真实值区分开,我们用 \(x_t\) 表示真实值,用 \(\hat x_t^-\) 表示估计值,用 \(\hat x_t\) 表示最终估计值(也就是估计值和观测值合成的最佳估计值)。
估计值的计算公式:
协方差矩阵
但上面说到,“肯定是谁的不确定性小谁的系数就取得更大一些”,因此要想计算系数肯定也要把不确定性用矩阵表示出来。
那聪明的人就想到了,既然是正态分布,可以用方差!
好的,我们确实用方差描述正态分布。但有一个小问题:如果有两个维度怎么办?
一堆点在两个维度上成正态分布是这样的,那么在每一维上都会成正态分布,似乎两个方差就够了。
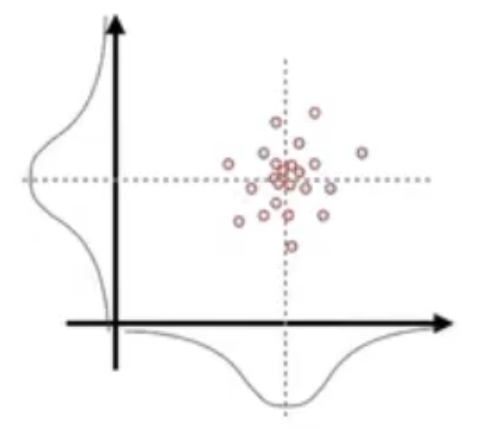
但,如果是下图这样的情况,点在每一维上仍然成正态分布,我们发现仅仅两个方差是不够的,还需要一个新的值,大概是表示 x 维度和 y 维度的关系。
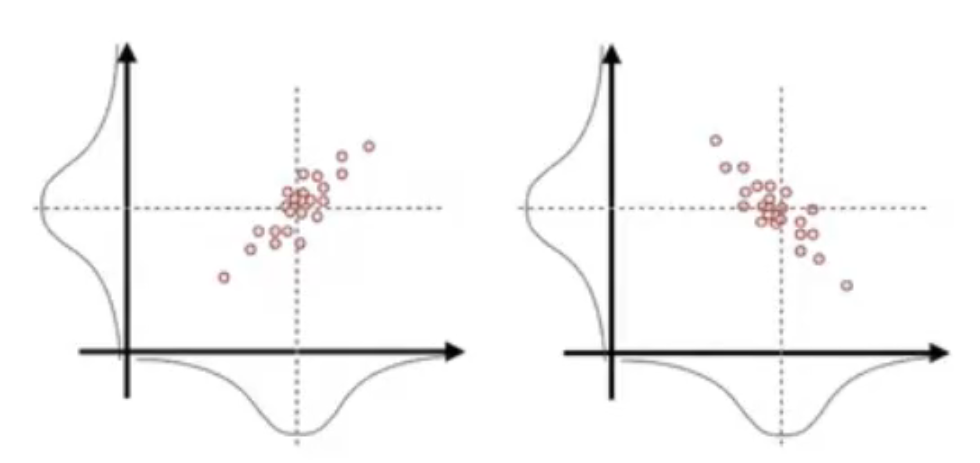
就比方说,假设你发现小车儿的不确定性受小石子的影响,而被小石子绊到时速度和路程都会突然增大,有了这个小性质我们的不确定性就不是简单的只跟某一维有关。
因此我们用矩阵记录不确定性 —— 矩阵可以包含每两维之间的关系。
好的,协方差矩阵的大小就是维度的数量,数量和你设的状态的维数相同(在本文的例子中有 \(p\) 和 \(v\) 两维)。每个位置表示的都是其中两维的关系。也就是说,对角线表示的是自己和自己的关系,也就是这一维的方差啦。
协方差矩阵的传递公式:
其中 \(P_t\) 表示 \(t\) 时刻的协方差矩阵,右上角带个减号还是因为它只是初步估计值,\(F\) 表示上文提到过的状态转移矩阵,\(F^T\) 表示矩阵的转置。\(Q\) 是这些关系转移的时候难免也会产生噪声,因为关系也不会按照完美的公式变化。
观测矩阵
设 \(z_t\) 为 GPS 在 \(t\) 时刻观测到的小车儿的位置。注意,虽然小车儿的状态有路程和速度两维,但这里速度只是用来辅助计算的,路程才是能够观测的。
既然如此,我们把 “路程才是能够观测的” 这句话也表示成矩阵。设 \(z_t=Hx_t+R\),其中 \(H\) 就是观测矩阵,此处它的值是 \([1~0]\),表示如何把你设计的状态转化为观测到的状态。而 \(x_t=\left[\begin{array}{c}p_t \\v_t\end{array}\right]\),\(R\) 是观测噪声的协方差矩阵,在这里观测值只有一个因此乘起来是一个数字 \(R\) 也是一个数字。
那这个 \(H\) 只有 \([1~0]\) 在这里看起来有点蠢……但其实,假设你实际测量中观测到的路程不是简单的一个 \(z_t\),而是一堆奇奇怪怪的参数,并且这些参数可能又跟你状态里的好几维都有关,你只知道状态 \(x\) 对每个参数的影响,这时候 \(H\) 就是一个比较复杂的矩阵了,卡尔曼滤波器的数据融合功能也是在这里体现出来的。
状态更新
变量认识全了开始更新状态:
理解一下,加号前面是估计值,后面是根据观测值修正的过程,修正完得到最终估计值。
修正过程中乘的这个系数 \(K_t\) 非常重要,它叫卡尔曼系数,当然也就是我们在最开头提出的,系数怎么取最优的问题。
卡尔曼系数的公式:
卡尔曼系数由观测值和估计值的协方差矩阵来决定,对应了最开始说的 “肯定是谁的不确定性小谁的系数就取得更大一些”。
然后还差最后一个公式,从 \(P_t^-\) 到 \(P_t\) 的转移:
完整公式
预测:
修正:
按照这样循环往复就可以写代码了。其中 \(x\) 和 \(P\) 的初始值其实不重要,因为很快就会趋近于真实值。\(Q\) 和 \(R\) 是根据实际情况设的。
应用
除了滤波应该还有很多应用,不知道没用过。