今天和大家分享时空数据挖掘方向的资料。
时空数据挖掘是人工智能技术的重要分支,是一种采用人工智能和大数据技术对城市时空数据进行分析与挖掘的方法,旨在挖掘时空数据,理解城市本质,解决城市问题。
目前,时空数据挖掘广泛应用于交通运输、地质灾害监测与预防、气象研究、竞技体育、犯罪分析、公共卫生与医疗及社交网络应用等领域。
本次分享是今年AAAI 2023 顶会中时空数据挖掘相关的论文,目前共整理了23篇,有缺漏也欢迎大家评论区补充哈!
AAAI人工智能会议在前文中有过介绍,含金量有目共睹,想了解最佳论文详情的同学可以点蓝字传送。
论文原文以及源代码文末领取!!!
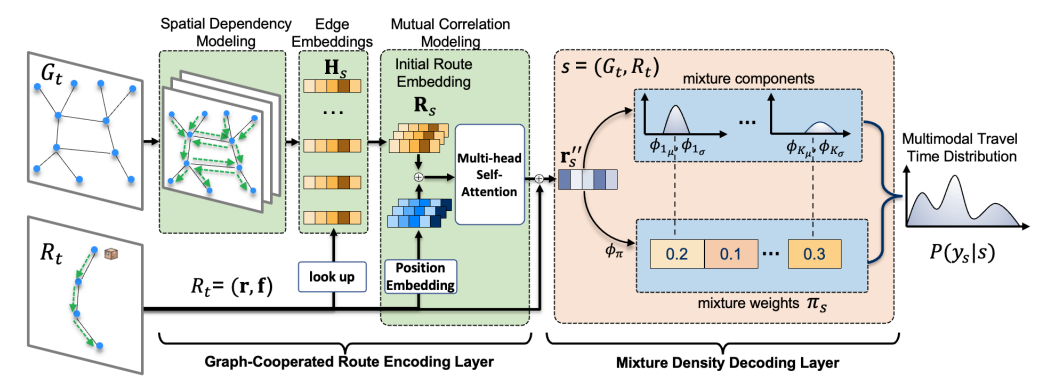
1. GMDNet: A Graph-based Mixture Density Network for Estimating Packages' Multimodal Travel Time Distribution
标题:基于图的混合密度网络用于估计包裹的多模态旅行时间分布
作者:Xiaowei Mao, Huaiyu Wan, Haomin Wen, Fan Wu, Jianbin Zheng, Yuting Qiang, Shengnan Guo, Lixia Wu, Haoyuan Hu, Youfang Lin
内容:该文提出了一个基于图的混合密度网络模型,来预测物流网络中包裹的多模旅行时间分布,充分利用了图神经网络和混合密度网络的优势,采用期望最大化框架进行训练,在两个真实数据集上验证了其优越性。
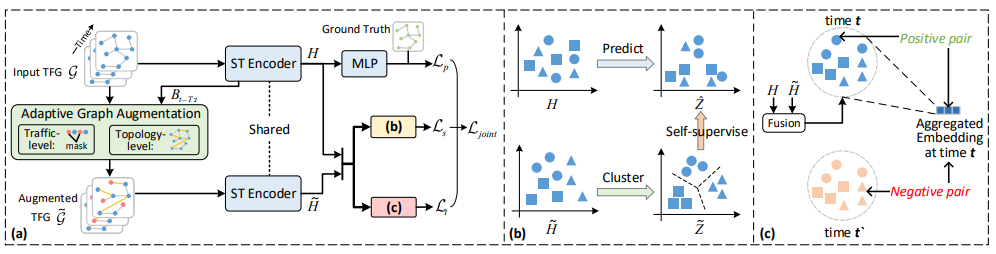
2. Spatio-Temporal Self-Supervised Learning for Traffic Flow Prediction
标题:交通流量预测的时空自监督学习
作者:Jiahao Ji, Jingyuan Wang, Chao Huang, Junjie Wu, Boren Xu, Zhenhe Wu, Junbo Zhang, Yu Zheng
内容:该文提出了一个空间时间自监督学习的交通流预测框架,通过自适应的数据增强和辅助的自监督学习任务,增强了模型对空间和时间异质性的表示能力,从而实现了对不同时段和区域的稳健交通流预测。
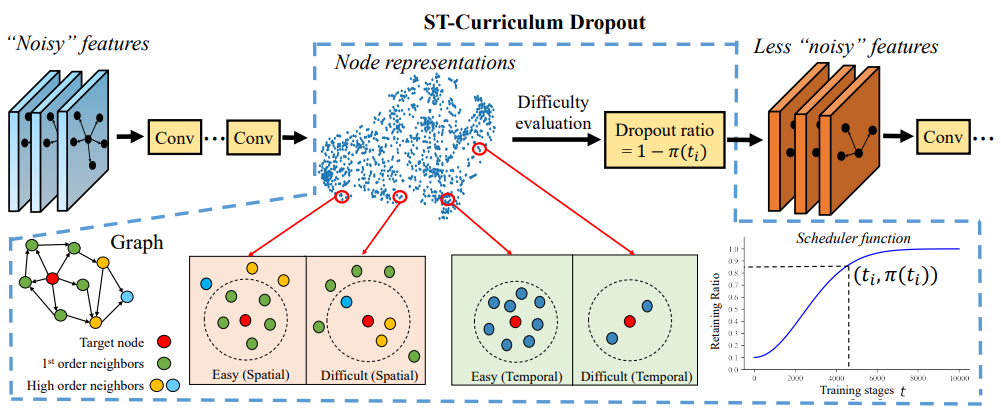
3. Easy Begun Is Half Done: Spatial-Temporal Graph Modeling with ST-Curriculum Dropout
标题:轻松的开端是成功的一半:利用ST-Curriculum Dropout进行时空图建模
作者:Hongjun Wang, Jiyuan Chen, Tong Pan, Zipei Fan, Xuan Song, Renhe Jiang, Lingyu Zhang, Yi Xie, Zhongyi Wang, Boyuan Zhang
内容:该文提出了一个空间时间课程舍弃策略,通过评估每个节点在高维特征空间中的学习难度,先让模型学习简单的空间时间关系,然后逐渐加入难样本,使模型逐步适应数据的空间时间异质性,从而提高了模型的表达能力和泛化性能。
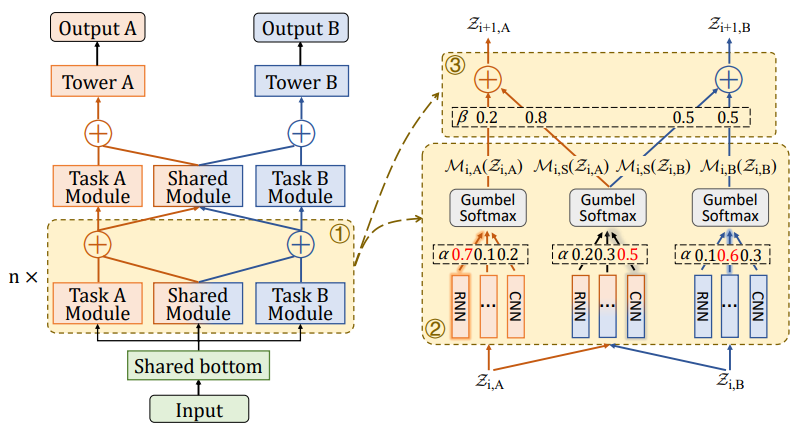
4. AutoSTL: Automated Spatio-Temporal Multi-Task Learning
标题:AutoSTL:自动化的时空多任务学习
作者:Zijian Zhang, Xiangyu Zhao, Hao Miao, Chunxu Zhang, Hongwei Zhao, Junbo Zhang
内容:该文提出了一个自动化的空间时间多任务联合学习方法AutoSTL,通过可扩展的网络结构、共享模块和特征融合机制来建模复杂的空间时间依赖关系和不同任务之间的内在关联,并实现了对网络操作和融合权重的自动分配。
5. PDFormer: Propagation Delay-Aware Dynamic Long-Range Transformer for Traffic Flow Prediction
标题:PDFormer:考虑传播延迟的动态长程变换器用于交通流量预测
作者:Jiawei Jiang, Chengkai Han, Wayne Xin Zhao, Jingyuan Wang
内容:该文提出了一个传播迟滞感知的动态长程transformer网络PDFormer用于交通流预测,通过空间自注意力模块捕获动态空间依赖,图掩码矩阵Highlight短程和长程空间依赖,并设计了交通延迟感知的特征变换模块来建模空间信息传播的时间延迟,在多个数据集上实现了state-of-the-art的性能。

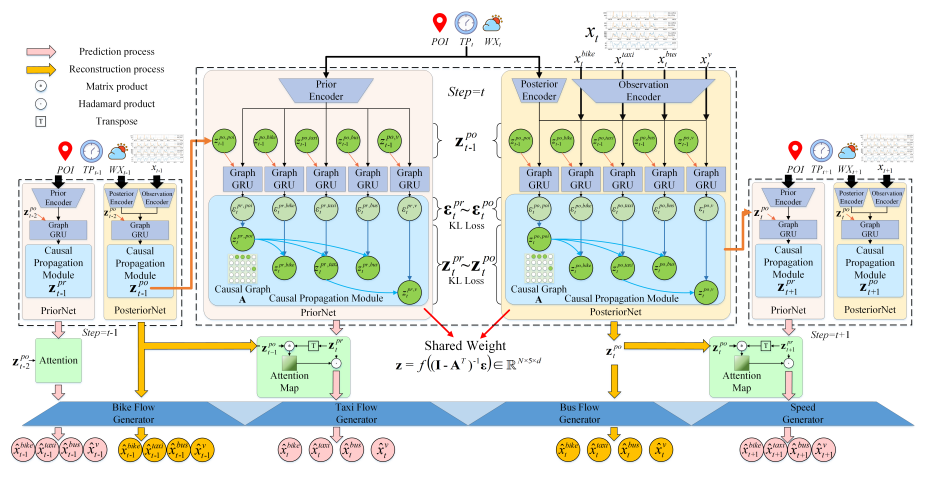
6. Causal Conditional Hidden Markov Model for Multimodal Traffic Prediction
标题:因果条件隐藏马尔可夫模型用于多模态交通预测
作者:Yu Zhao, Pan Deng, Junting Liu, Xiaofeng Jia, Mulan Wang
内容:该文从观测生成原理的视角分析了影响多模交通流生成的物理概念,并提出了一个因果条件隐马尔可夫模型CCHMM来预测多模交通流,该模型通过后验网络解耦出因变量的因果表示,采用因果传播模块挖掘因果关系,并通过互监督的训练增强了模型的可识别性,实验表明CCHMM可以有效解耦概念的因果表示、识别因果关系,并准确预测多模交通流。
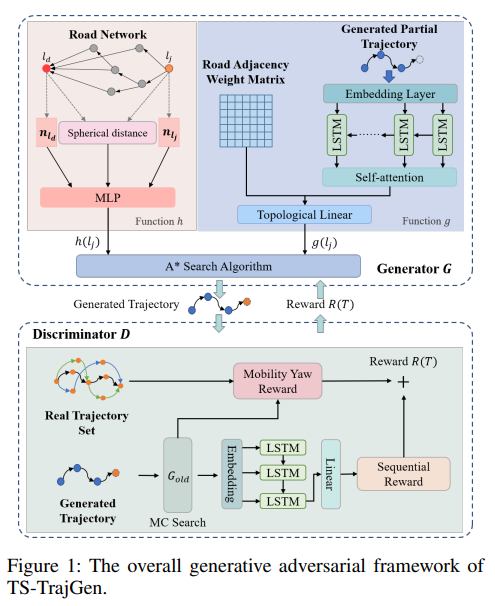
7. Continuous Trajectory Generation Based on Two-Stage GAN
标题:基于两阶段GAN的连续轨迹生成
作者:Wenjun Jiang, Wayne Xin Zhao, Jingyuan Wang, Jiawei Jiang
内容:该文提出了一个两阶段的生成对抗框架TS-TrajGen来生成连续的道路网络上的轨迹,它通过生成器整合了A*算法的人 mobility假设来学习人的移动行为,并在判别器中结合顺序奖励和mobility yaw奖励来增强生成器的效果。另外,该方法提出了一个两阶段的生成过程来克服现有随机生成过程的缺点。
8. GRLSTM: Trajectory Similarity Computation with Graph-Based Residual LSTM
标题:GRLSTM:基于图结构残差LSTM的轨迹相似性计算
作者:Silin Zhou, Jing Li, Hao Wang, Shuo Shang, Peng Han
内容:该文提出了一个新的框架GRLSTM用于计算道路网络上的轨迹相似性,该框架结合了知识图谱嵌入(KGE)、图神经网络(GNN)和残差网络的多层LSTM,构建点知识图谱学习点之间的多关系,使用KGE学习点和关系的嵌入来构建点融合图,用GNN学习点融合图的拓扑结构,最后用残差LSTM学习轨迹嵌入。为进一步提高嵌入的准确性和鲁棒性,引入了两个基于邻居的点损失函数。

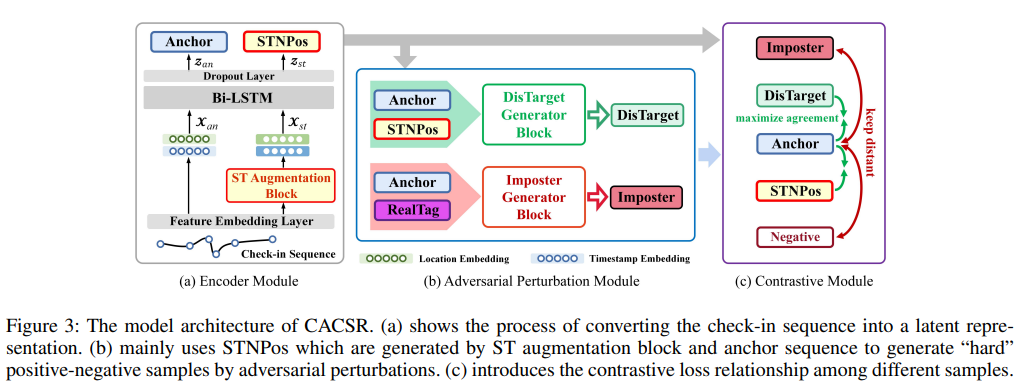
9. Contrastive Pre-training with Adversarial Perturbations for Check-in Sequence Representation Learning
标题:对抗扰动对比预训练用于签到序列表示学习
作者:Letian Gong, Youfang Lin, Shengnan Guo, Yan Lin,Tianyi Wang, Erwen Zheng, Zeyu Zhou, Huaiyu Wan
内容:该文提出了一个对抗扰动的对比预训练模型CACSR用于签到序列的表示学习,首先设计了空间时间增强模块在潜空间扰动签到序列的空间时间特征来减轻手动数据增强的压力,其次通过对抗训练生成“困难”的正负样本对构成有效的对比预训练目标,这两点鼓励模型学习签到序列的高级空间时间模式和语义而忽略无关细节。在三个真实数据集的两种下游任务上表明该模型优于当前最先进的预训练方法和端到端模型。
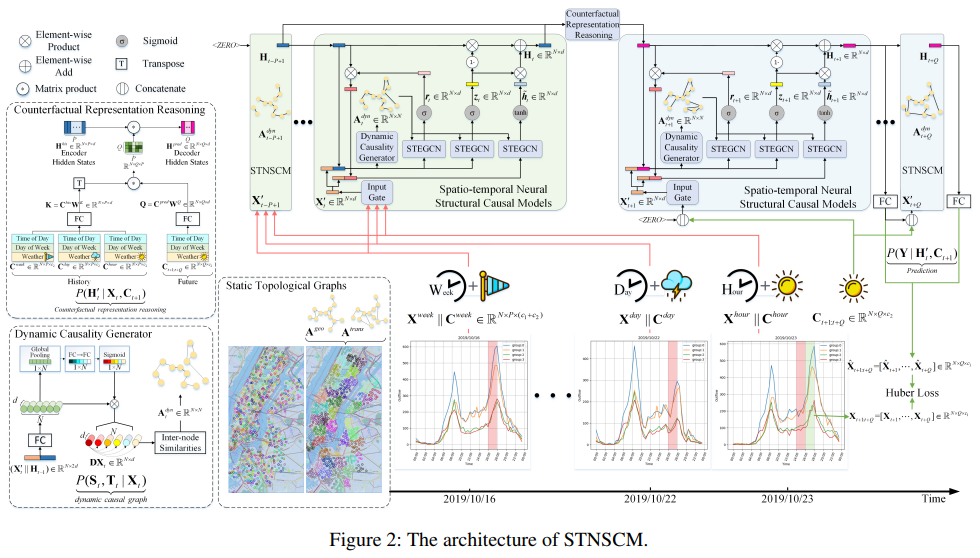
10. Spatio-temporal Neural Structural Causal Models for Bike Flow Prediction
标题:基于时空神经结构因果模型的自行车流量预测
作者:Pan Deng、Yu Zhao、Junting Liu、Xiaofeng Jia、Mulan Wang
内容:该文从因果角度出发,针对单车系统的单车流预测问题,提出了空间时间神经结构因果模型STNSCM,首先建立因果图描述交通预测,分析输入数据、上下文条件、空间时间状态和预测结果之间的因果关系;然后应用前门准则消除特征提取过程中的混杂偏差;最后提出反事实表示推理模块,将事实场景下的空间时间状态推断到未来的反事实场景,以提高预测性能。实验表明该模型优于现有方法,特别是对外部环境引起的波动更具鲁棒性。
11. Next POI Recommendation with Dynamic Graph and Explicit Dependency
标题:利用动态图和显式依赖进行下一个兴趣点推荐
作者:Feiyu Yin, Yong Liu, Zhiqi Shen, Lisi Chen, Shuo Shang, Peng Han
内容:该文针对下一兴趣点POI推荐问题,提出了基于序列的邻域搜索与预测模型SNPM,其中使用RotatE知识图谱嵌入和Eigenmap方法从疏散的签到数据中提取POI之间的关系构建相似图,然后通过聚合相似POI增强模型对POI通用特征的表达,同时构建基于序列的动态邻域图寻找相似邻域,并开发了一个多步依赖预测模型MSDP来显式利用前序POI信息进行下一POI的预测。

12. Scalable Spatiotemporal Graph Neural Networks
标题:可扩展的时空图神经网络
作者:Andrea Cini, Ivan Marisca, Filippo Maria Bianchi, Cesare Alippi
内容:该文提出一种可扩展的架构,用于预测空间时间序列的神经预测,利用随机循环神经网络高效编码输入时间序列的历史,获取封装多尺度时间动态的高维状态表示,然后利用图邻接矩阵的不同幂将这些表示沿空间维度传播,生成包含丰富空间时间特征的节点嵌入,这些嵌入可以提前以无监督方式预计算,然后馈入前馈解码器进行多尺度空间时间表示到预测的映射,训练可以通过采样节点嵌入并行化而不破坏依赖关系,因此可扩展到大型网络。
13. Learning Decomposed Spatial Relations for Multi-Variate Time-Series Modeling
标题:学习分解的空间关系,用于多变量时间序列建模
作者:Yuchen Fang, Kan Ren, Caihua Shan, Yifei Shen, You Li, Weinan Zhang, Yong Yu, Dongsheng Li
内容:该文针对多变量时间序列数据建模问题,提出了一种细粒度建模和利用变量间空间相关性的框架。通过分析真实数据集的统计特性,首先识别出空间相关图的一种通用分解,即隐藏的空间相关可以分解为先验部分和动态部分,前者适用于所有样本,后者在样本间变化,需要建立不同的图来建模这些关系。为了更好地协调这两种关系图的学习,提出了一个min-max学习范式,既规范不同动态图的公共部分,又保证样本间的空间可区分性。

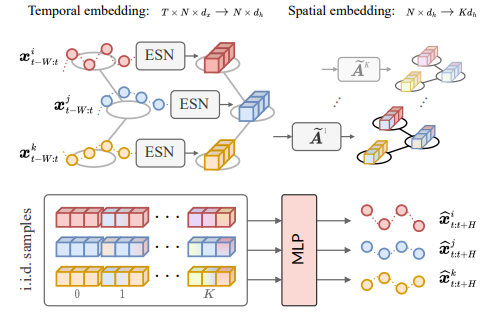
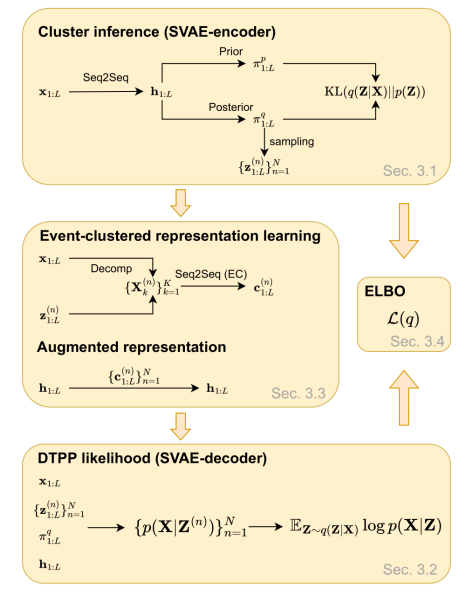
14. c-NTPP: Learning Cluster-Aware Neural Temporal Point Process
标题:c-NTPP:学习集群感知的神经时序点过程
作者:Fangyu Ding, Junchi Yan, Haiyang Wang
内容:该工作针对连续时间空间中的事件序列建模问题,观察到许多事件数据表现出事件之间的稀疏相关性聚类模式,而现有的神经 TPP 模型中历史编码器常用 RNN 或 Transformer 等,很少显式考虑这种特征。为此,该文提出了 c-NTPP 模型,使用顺序变分自动编码器框架推断每个事件所属的潜在聚类,并设计了基于聚类的注意力机制学习每个聚类并聚合表示,从而获得每个事件的最终表示。
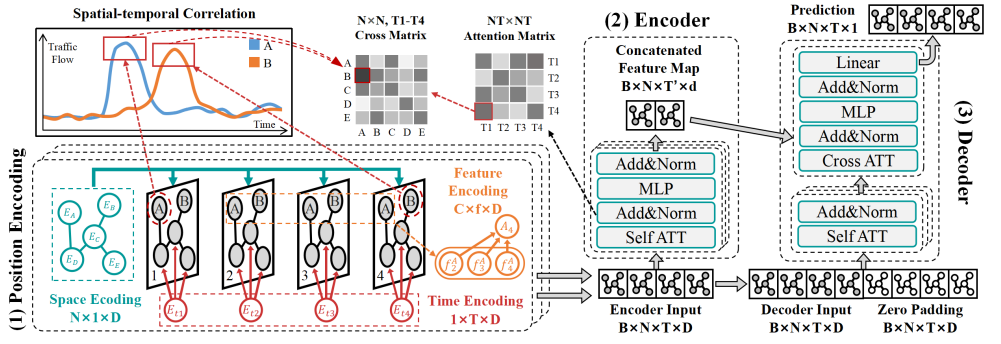
15. Trafformer: Unify Time and Space in Traffc Prediction
标题:Trafformer:在交通预测中统一时间和空间
作者:Di Jin, Jiayi Shi , Rui Wang , Yawen Li*, Yuxiao Huang, Yu-Bin Yang
内容:该工作针对交通流量预测问题,提出Trafformer模型,在transformer式模型中统一处理空间和时间信息,通过空时自注意力机制捕捉复杂的时空依赖,并使用生成式解码器一次性预测多个时间步,还设计了降低计算复杂度的变体。在交通数据集上实验表明,该模型优于现有基准,为解决时空交通预测问题提供了有希望的方向。
16. Spatio-Temporal Meta-Graph Learning for Traffic Forecasting
标题:时空元图学习用于交通预测
作者:Renhe Jiang, Zhaonan Wang, Jiawei Yong, Puneet Jeph, Quanjun Chen, Yasumasa Kobayashi, Xuan Song, Shintaro Fukushima, Toyotaro Suzumura
内容:该工作针对交通流量预测问题,提出了空间-时间元图学习方法来学习交通数据的时空图结构,并将其集成到元图卷积循环网络中,形成MegaCRN模型;在两个基准数据集和东京高速道路数据集上的评估显示其优于当前最先进的方法,定性分析也证明了模型可以明确区分不同模式的道路链和时间槽,并对异常交通情况具有强健的自适应能力。
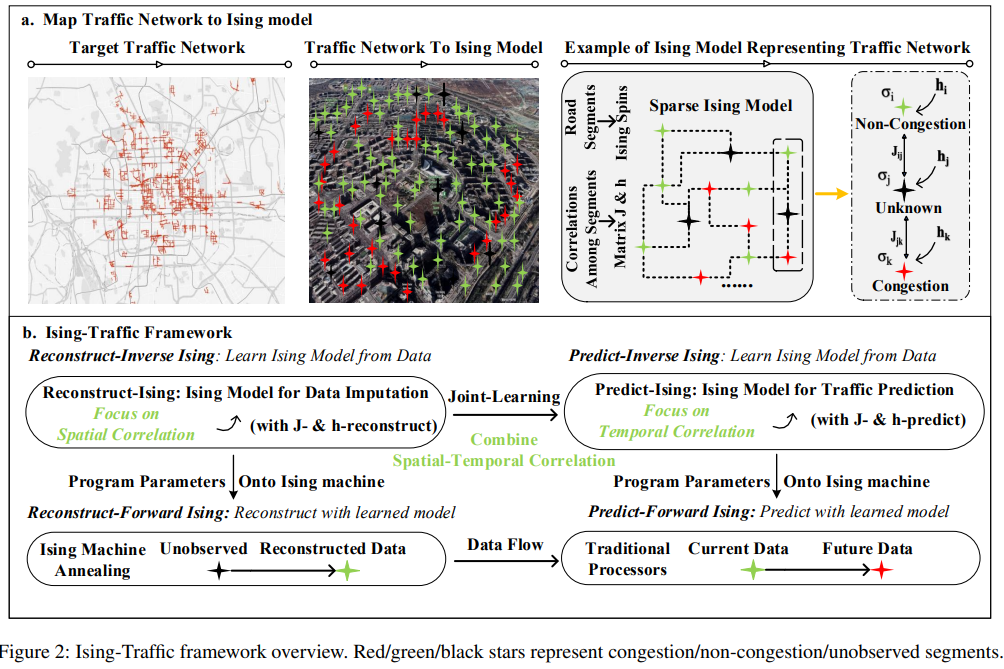
17. Ising-Traffc: Using Ising Machine Learning to Predict Traffc Congestion under Uncertainty
标题:Ising-Traffic:利用伊辛机器学习在不确定性下预测交通拥堵
作者:Zhenyu Pan, Anshujit Sharma, Jerry Yao-Chieh Hu, Zhuo Liu, Ang Li, Han Liu, Michael Huang, Tong Geng
内容:该工作通过设计双模型框架Ising-Traffc来解决交通拥堵预测中的准确性和实时性难题,它利用Ising模型的强表达能力和Ising机的强计算能力,打破了算法复杂度和计算效率之间的传统权衡关系,实现了比最新方法更高的精度和更低的延迟。具体来说,Ising-Traffc将拥堵预测问题建模为两个Ising模型:Reconstruct-Ising在Ising机上运行来准确处理不确定性,Predict-Ising在传统处理器上运行来精确预测未来拥堵,计算需求只有现有解决方案的1.8%。
18. Hierarchical Contrastive Learning for Temporal Point Processes
标题:层次对比学习用于时序点过程
作者:Qingmei Wang, Minjie Cheng, Shen Yuan, Hongteng Xu
内容:该工作针对时点过程模型的最大似然估计易过拟合的问题,提出了一种层次对比学习正则方法,它在事件级别和序列级别联合进行对比噪声估计,通过模型引导的稀疏过程高效生成正负样本序列,最大化其对立似然以正则化最大似然,实验表明可一致改善各时点过程模型的泛化能力。

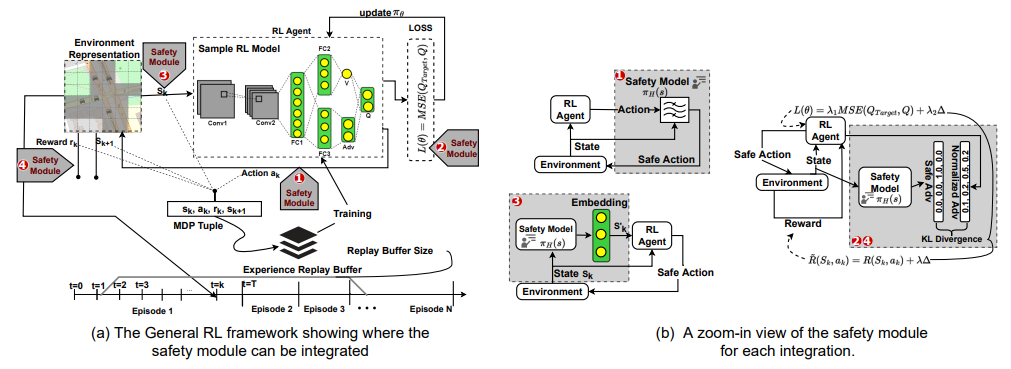
19. SafeLight: A Reinforcement Learning Method toward Collision-Free Traffc Signal Control
标题:SafeLight:一种朝向无碰撞交通信号控制的强化学习方法
作者:Wenlu Du, Junyi Ye, Jingyi Gu, Jing Li, Hua Wei, Guiling Wang
内容:该工作首次将路面安全标准引入强化学习交通信号控制以确保安全性,提出了Safelight残差强化学习方法,采用多目标损失函数和奖励塑形等技术,在合成和真实基准数据集上实验表明,该方法可以明显减少事故发生率的同时提高交通流动性。
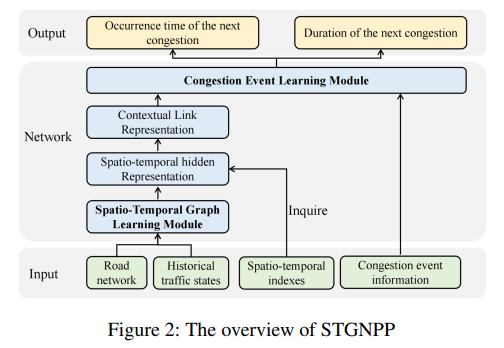
20. Spatio-Temporal Graph Neural Point Process for Traffic Congestion Event Prediction
标题:时空图神经点过程用于交通拥堵事件预测
作者:Guangyin Jin, Lingbo Liu, Fuxian Li, Jincai Huang
内容:该工作针对交通拥堵事件预测问题,提出了空间-时间图神经点过程框架STGNPP,先通过空间-时间图学习模块从历史交通状态和路网中捕获长程空间-时间依赖性,再用门控循环单元模型拥堵演变模式,并通过周期门控机制改进点过程的强度函数来利用周期信息,从而同时预测下个拥堵的发生时间和持续时间。
21. City-scale Pollution Aware Traffic Routing by Sampling Max Flows using MCMC
标题:基于MCMC采样最大流的城市尺度污染感知交通路径规划
作者:Shreevignesh Suriyanarayanan, Praveen Paruchuri, Girish Varma
内容:该工作针对城市地区交通造成的严重空气污染问题,提出一种污染感知路由策略来实现避免任何区域极端污染、使通行时间短、有效利用道路容量三个目标的平衡。该方法基于采样理论,构建了第一个可以对平面图的最大流整数解进行采样并具有通行长度概率依赖性理论保证的马尔可夫链。该策略在真实世界路网上进行仿真表明,与其他方法相比,在全球各大城市地图上可以显著降低污染严重区域。
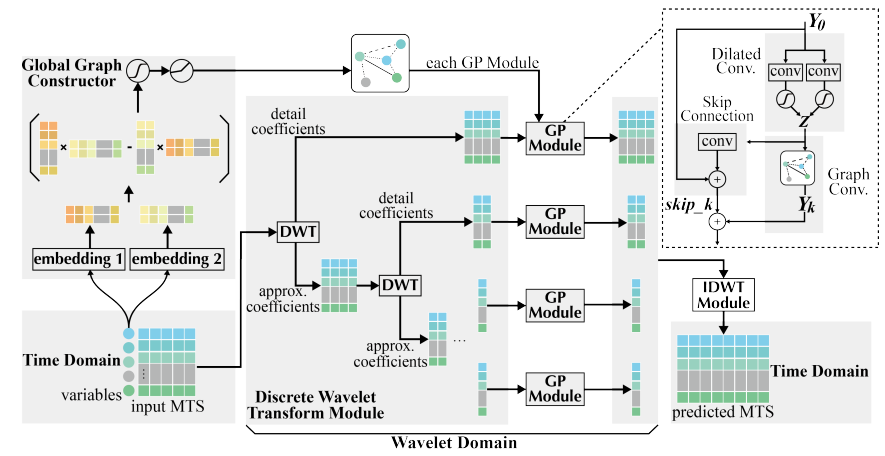
22. WaveForM: Graph Enhanced Wavelet Learning for Long Sequence Forecasting of Multivariate Time Series
标题:WaveForM:用于多变量时间序列的长序列预测的图增强小波学习
作者:Fuhao Yang, Xin Li, Min Wang, Hongyu Zang, Wei Pang, Mingzhong Wang
内容:该工作提出了WaveForM,这是一种基于小波和图的多变量时间序列长序列预测框架,它先利用小波变换表示时间序列,同时获取时域和频域特征,再通过学习全局图表示时间序列变量之间的关系,并用扩张卷积和图卷积在小波域进行预测,在5个真实世界数据集上的长序列预测实验表明,该方法相比每个数据集的最强基准都取得了显著提升。
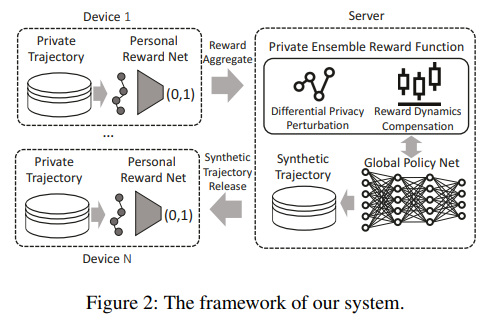
23. PateGail: A Privacy-Preserving Mobility Trajectory Generator with Imitation Learning
标题:PateGail:一种具有模仿学习的隐私保护移动轨迹生成器
作者:Huandong Wang, Changzheng Gao, Yuchen Wu, Depeng Jin, Lina Yao, Yong Li
内容:该工作提出了PateGail,这是一种用于生成人类移动轨迹的保护隐私的模仿学习模型,它利用生成对抗模仿学习来模拟人的决策过程,并基于分布式存储在用户设备上的移动数据进行集成训练,其中个人判别器本地区分真实和生成轨迹;在训练过程中,只共享生成轨迹及其奖励,并采用扰动机制来保证差分隐私;另外,还设计了奖励聚合机制来更好地模拟人的决策,理论证明该模型在聚合奖励下最大化用户折扣总奖励的下界。
关注下方《学姐带你玩AI》🚀🚀🚀
回复“时空数据”获取全部论文+代码合集
码字不易,欢迎大家点赞评论收藏!