NSFP算法
论文名称:《Deep Reinforcement Learning from Self-Play in Imperfect-Information Games》
这是一篇博弈论和强化学习交叉的文章,网上的资料比较少,但是确实是对手建模的重要算法之一。虽然后面的PSRO算法指出NFSP是PSRO的一个特例,但是个人觉得还是很有学习的必要。
一、基本问题
在多智能体独立学习算法中,环境的非平稳性一直是一个非常大的问题。传统的强化学习算法直接应用于多智能体环境中,由于环境不符合马尔可夫过程,算法的收敛没有理论的保证。二在博弈环境中,传统的强化学习算法往往会过拟合对手的策略,进一步放大了环境的非平稳性。
纳什均衡,是博弈论中的术语,是指智能体在对手做出任何行动下,执行的策略依旧可以最大化收益的一种状态。在多智能体环境下,模型收敛的目标就是纳什均衡。
NFSP算法就是作者提出的一种端到端的算法,可以在没有任何先验输入的情况下,收敛到纳什均衡。
二、基础知识
-
虚拟博弈算法(Fictitious play, FP)
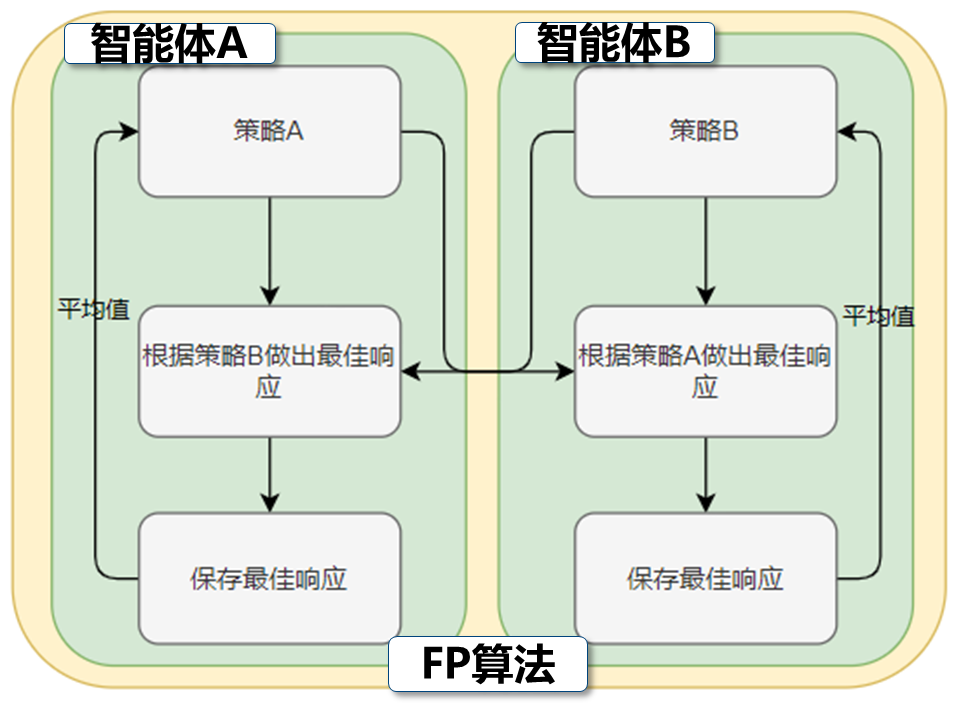
FP算法是一个经典的博弈论算法。这个算法更具对手的策略计算只身的最佳响应策略,并保存到一个缓冲池中。然后取缓冲池中的平均策略(这里有说是按一定比例混合平均策略的,但是都差不多),作为下一轮的策略,不断迭代,最终可以收敛到纳什均衡。FP算法的流程图表示如下:
显然,FP算法有明显的缺点:
- 必须知道全局的动作和收益,因为如果不知道全局的动作和收益,就没有办法计算最佳响应策略。
- 不适用于扩展性博弈和重复博弈,并且FP算法只能处理两个智能体的情况。扩展性和重复博弈都要求智能体可以多次选择动作,但是FP算法只能求解一次博弈的均衡策略(迭代是为了求解这个均衡策略)。
举个具体的例子来说:
动作A 动作B 动作A 1,1 1,1 动作B 0,2 2,0 上面的表格是一个进攻防御模型的收益矩阵,行表示进攻方,可以选择动作A和动作B。列表示防御方,可以选择动作A和动作B。表格中的数值表示收益,比如第一列,第二行中(0,2)表示如果防御方选择动作B,进攻方选择动作A。那么,防御方收益为0,进攻方收益为2。
在这个模型中,进攻方选择动作A的收益分别为(1,2),大于等于动作B的收益(1,0),是一个弱优势策略。所以,如果进攻方绝对理性,就一定会选择动作A。防御方考虑到进攻方一定会选择动作A后也会选择动作A,应为动作A的收益1大于动作B的收益0。因此,在这个模型中动作A就是纳什均衡策略。
但是以上只是理论分析,实际上适用FP算法迭代100次之后,进攻方和防御方选择各个策略的概率如下:
动作A 动作B 进攻方 0.995 0.005 防御方 0.998 0.002 可以看到,FP算法迭代后,选择动作A的概率逐渐逼近1。
-
虚拟自博弈算法(Fictitious self play, FSP)
-
自博弈
就是智能体和自己(也可以是以前的自己)互相对抗,使得只身的策略收敛到纳什均衡的一种方法。
虚拟自博弈就是将自博弈的过程应用在了FP算法。同时FPS算法将求解最优策略的过程替换为了强化学习算法。
虚拟自博弈的流程图如下:

-
三、NFSP算法
NFSP算法就是引入了深度强化学习(DQN)的FSP算法。同时,NFSP算法使用监督学习学习纳什均衡策略,通过混合纳什均衡策略和强化学习策略的方式得到最终的策略。
具体来说,NFSP算法再求解最佳响应策略的时候使用了DQN,然后以保存的最佳响应的数据作为标签训练一个监督学习的网络拟合纳什均衡策略。
但是论文中还提到,由于监督学习的数据集是动态变化的,会导致模型的不稳定。所以在使用监督学习采样的使用了蓄水池采样技术(这里不多讲)。
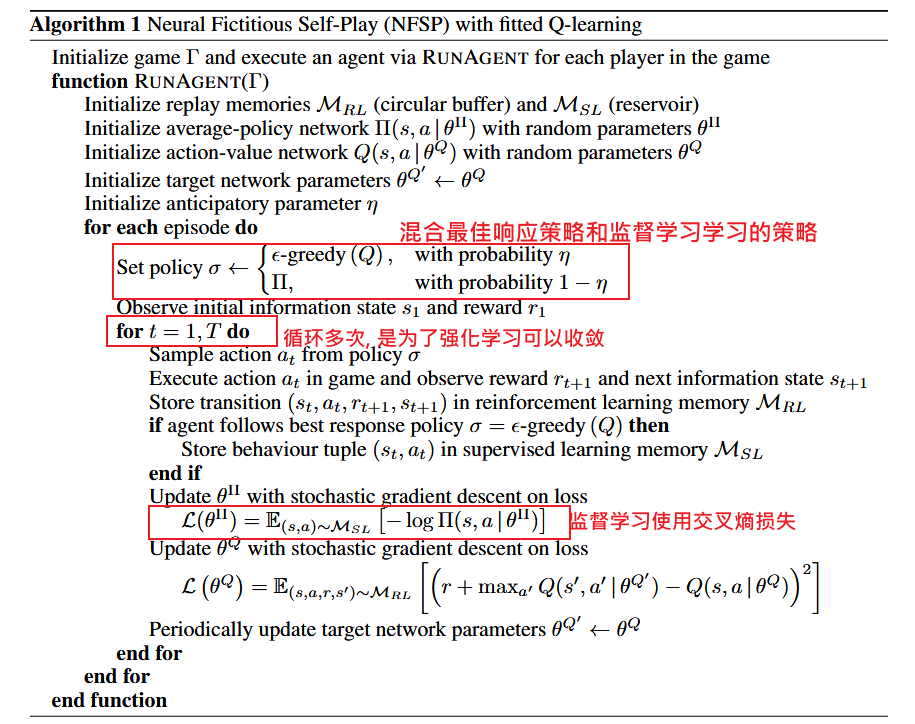
论文中, NFSP算的伪代码如下: