Ransac全称为Random Sample Consensus,随机一致性采样。该方法是一种十分高效的数据拟合方法。我们通过最简单的拟合直线任务来了解这种方法思路,继而扩展到特征点匹配中的误点剔除问题。
(注意,RANSAC不是直接用于特征点匹配,而是一种在初步特征匹配后消除误匹配的方法)
直线拟合过程
在平面直线拟合任务中,我们的目标是找到一条直线方程,使得数据集中大部分点都在这条直线方程附近;另一种理解,就是找到一个x,y之间的映射关系(模型),使得该映射关系能够尽量反映数据集中大部分点的x,y之间的关系。
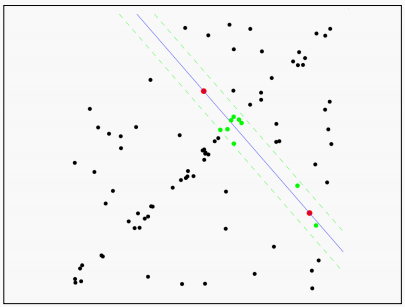
首先,由于两个点能够确定一条直线,我们在数据集中随机选取两个点,通过这两个点确定一条直线方程。
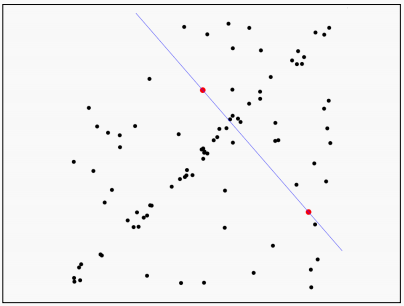
接下来,让数据集内的所有点对刚才选择的直线方程进行评估,看这条方程选的怎么样。我们计算所有点到直线的距离。
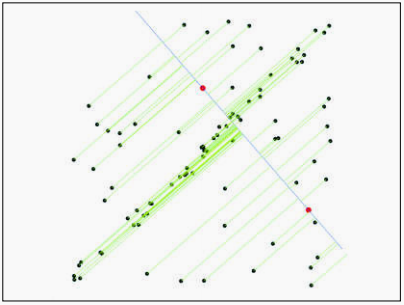
设置一个阈值范围来定义直线的”附近“,在这个范围内的点作为内点,范围外的点作为外点。计算内点数量。
接下来重复上面的步骤,再次随机选取两个点,求解方程,所有点计算距离,得到内点数量。
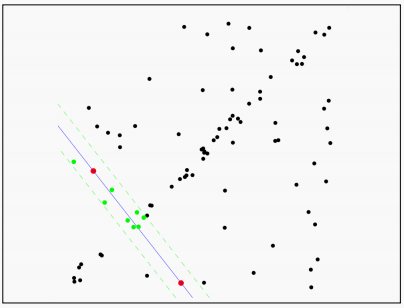
重复这一过程直到内点数量满足要求,或者达到迭代次数,此时得到的直线方程就是我们需要的直线方程。
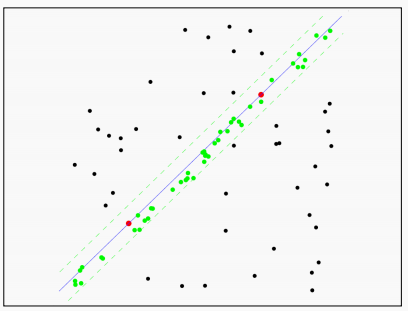
最后,为了更加精确的找到这个映射关系,我们还是需要对所有的内点进行一次最小二乘拟合。得到最终结果。
整体流程如下:
重复 N 次:
- 均匀随机抽取 2 个点
- 对这 2 个点进行直线拟合
- 在剩余的点中找出该直线的内点(即与直线距离小于 t 的点)
- 如果内点数量达到 d 个或更多,则接受该直线,并使用所有内点重新拟合
对直线拟合的RANSAC方法的思考
这个方法几乎是完全随机的、暴力的去求解这个问题。这种方法可行吗?
在计算机学科里,这种方法还真是可行。它不仅简单,还能适用于多种不同的问题。
在直线拟合任务中,数据集中每一个点(x, y),我们称其为一个sample,通过许多这样的sample,我们期望找到一个映射关系(model),能够最好的描述x, y之间的关系,使得更多的sample落在该模型的附近。事实上,任何类似这种给定samples(每个sample都是一组离散的映射),求解最优的整体映射模型的问题,都可以用RANSAC方法进行处理。
RANSAC的通用步骤
- 随机选择一个最小subset sample集,用于描述模型
- 拟合这个模型
- 让其他的点对这个模型进行投票,选出距离这个模型近的点作为内点,其他作为外点
- 重复这一过程,直到得到最优的模型
RANSAC的大体思想就是这样,我们下面讨论一些细节问题,如何选择参数?
参数选择
初始点的数量 s
通常为拟合模型所需的最少点数,比如直线拟合,确定一条直线的最小点集是2个,s就为2。
距离阈值 t
哪些点是内点,这是一个任务导向的问题。需要根据任务的数据集具体情况而定。选择 t,使内点出现的概率为 p(例如 0.95)
如果数据中的噪声分布符合均值为 0、标准差为 σ 的高斯噪声,则 t² = 3.84σ²
采样次数 N
可能我们迭代几次就找到了最优解,后续的迭代都是浪费资源;也有可能我们迭代了很多次,也找不到最优解,而这个很多次到底选多少?几百?几千?几万?这个迭代次数N如何确定。
这时我们只有采用概率的方式来确定迭代次数,也就是迭代N次,最有可能得到最优解。
设迭代N次后,至少有一次我们选择的随机样本是最优解(不含外点的模型),这个概率为p。也就是说N次迭代后我们完美找到最优解的概率为p,我们当然希望这个p值较高,我们定一个p=0.99。
那么N次迭代后我们一次都没有选择到最优解(不含外点模型)的概率是多少?显然这个说法和上面的是逻辑互斥的,这个概率为1 - p
从另一个角度来说,我们假定真实的外点率为e,在一次迭代内我们选择了s个点,这s个点我们都选择了真实内点的概率,应该是\((1-e)^s\)
相反的,这s个点我们至少选了一个外点的概率,就是\(1-(1-e)^s\),也就是本次迭代没有得到最优解的概率。如果N次迭代每次都没有得到最优解呢,这个概率就是\((1-(1-e)^s)^N\)
上面两个粗体的描述是一致的,我们从两个角度得到了迭代N次都没有得到最优解的概率,从而将e、s、N、p这几个变量建立了关系:
两边同时log一下,我们就得到了N的表达式
在实践中,我们选择 N时,可以通过确定p = 0.99,估计一下数据集中的外点率e,通过模型类型确定s,来计算N的大小。如图中表格所示,如果外点率为40%,s为2,那么要达到0.99的最优解获得概率,迭代次数就应为7:
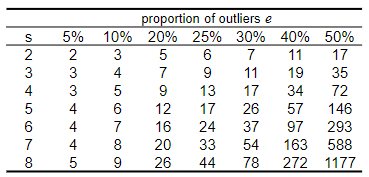
当然这是通过概率来算出来的迭代次数,只是给一个参考,实践中我们还是应当适当选取一个更大的值。
此外,内点比例 e 通常是先验未知的,所以选取最不利的情况,例如 50% 。如果发现了更多内点,则进行调整,例如若实际内点比例为 80%,那么异常值比例e=0.2 。
一致集大小 d
这个也是和数据集相关,应与预期的内点比例 1 - e 相匹配
自适应迭代次数
在RANSAC的应用中,我们通常采用一种自适应的过程去控制迭代次数。过程如下:
初始N设为无穷大,sample_count(采样计数)设为 0
当 N>sample_count 时:
- 选择一个样本并统计内点的数量
- 计算 e=1−(内点数量)/(点的总数)
- 根据e重新计算N:
- sample_count 自增 1
这样尽管最初的迭代次数N为无穷大,但我们在循环中,通过每次迭代算出来的外点率e可以得到新的N值,N值会不断减小。如果N值小于当前sample_count了,表示理论上迭代N次就够了,但我现在已经迭代了sample_count次(>N),所以迭代就可以停止了。
RANSAC在特征匹配问题中的应用
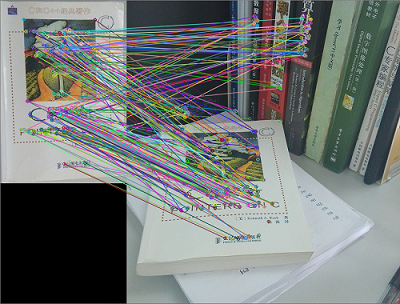
在图像特征进行匹配之后,往往得到的许多匹配点都是误点,如图:
这些误点会影响后续的图像拼接、识别等操作,需要将它们去除掉。得到如下图:
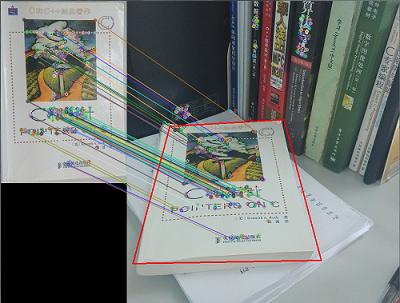
这个过程就可以采用RANSAC的方法。
在特征点的匹配中,每一对匹配的特征,就是一个离散的映射关系,也就是一个sample。(类比于直线拟合中的(x,y))。
存在一个最优的变换模型,对两个图像中的匹配点进行映射(类比于直线拟合中的直线方程)。
在图像的特征点变换时,我们用单应性矩阵描述两个平面之间的透视关系,它把一个平面上的点通过齐次坐标映射到另一个平面上。其公式为:
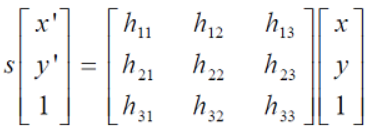
通常令h33=1来归一化矩阵。由于单应性矩阵有8个未知参数,至少需要8个线性方程求解,对应到点位置信息上,一组点对可以列出两个方程,则至少包含4组匹配点对。
适配这个最优转换模型的samples,就是内点。不适配这个模型的samples,就是外点。(注意这里的内点和外点不是图像上的特征点,而是由一对匹配好的特征点组成的sample)
随机抽样一致性算法(RANSAC)的优缺点
- 优点
- 简单且通用
- 适用于许多不同的问题
- 在实际应用中通常效果良好
- 缺点
- 有很多参数需要调整
- 对于低内点比例的情况效果不佳(迭代次数过多,甚至可能完全失败)
- 基于最少样本数量,并不总能获得模型的良好初始值