《机器人SLAM导航核心技术与实战》第1季:第11章_自主导航中的数学基础
视频讲解
-
【第1季】11.第11章_自主导航中的数学基础-视频讲解
-
【第1季】11.1.第11章_自主导航中的数学基础_自主导航-视频讲解
-
【第1季】11.2.第11章_自主导航中的数学基础_环境感知-视频讲解
-
【第1季】11.3.第11章_自主导航中的数学基础_路径规划-视频讲解
-
【第1季】11.4.第11章_自主导航中的数学基础_运动控制-视频讲解
-
【第1季】11.5.第11章_自主导航中的数学基础_强化学习与自主导航-视
第1季:第11章_自主导航中的数学基础
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------
添加图片注释,不超过 140 字(可选)
本书内容安排

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
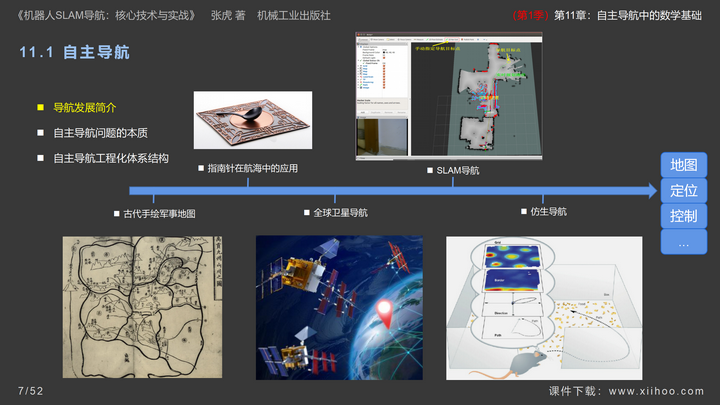
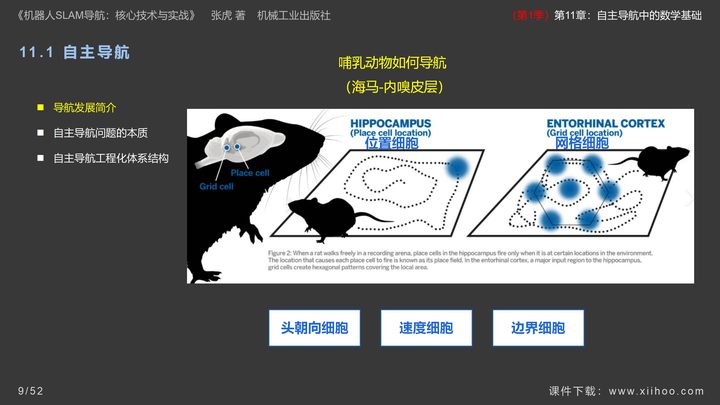
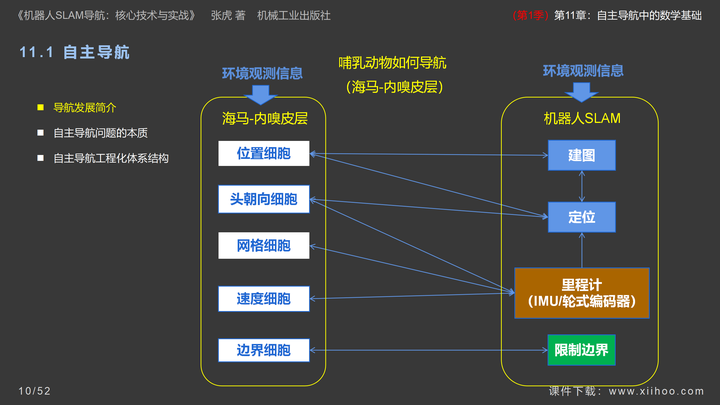
11.1 自主导航
①导航发展简介
②自主导航问题的本质
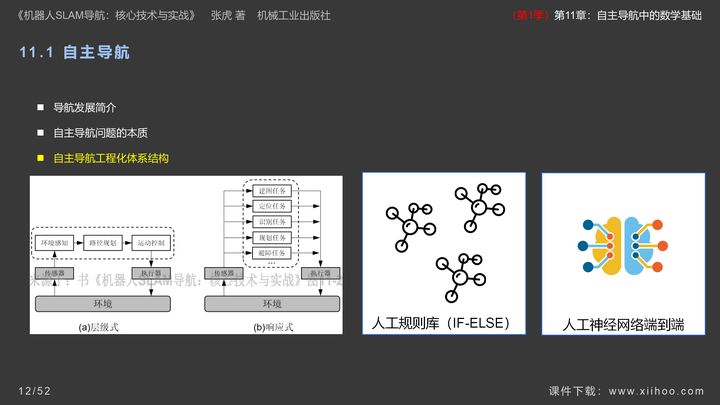
③自主导航工程化体系结构
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
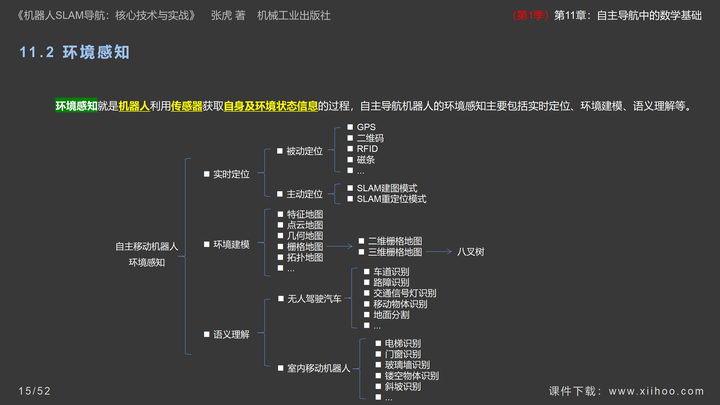
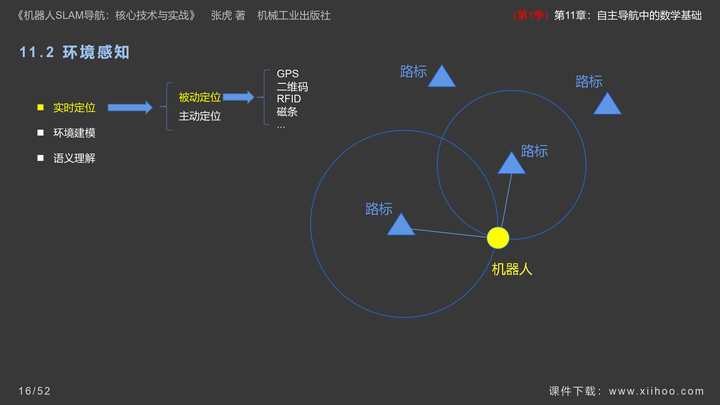
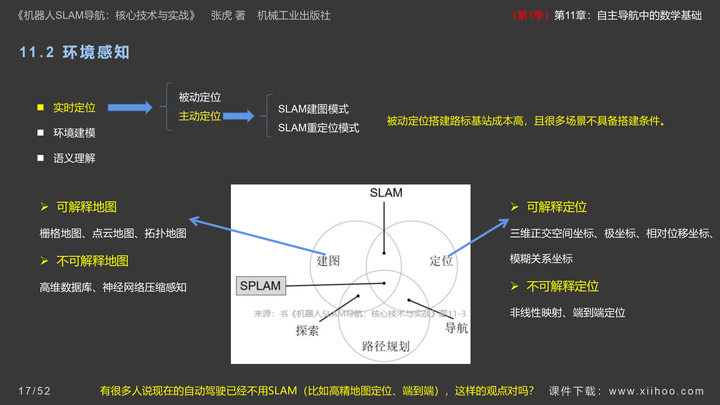
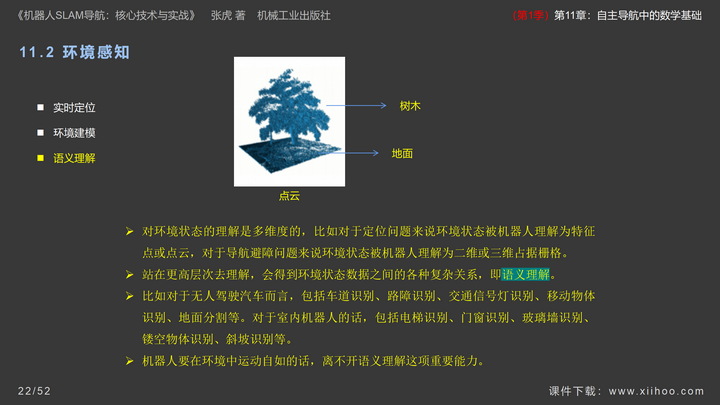
11.2 环境感知
①实时定位
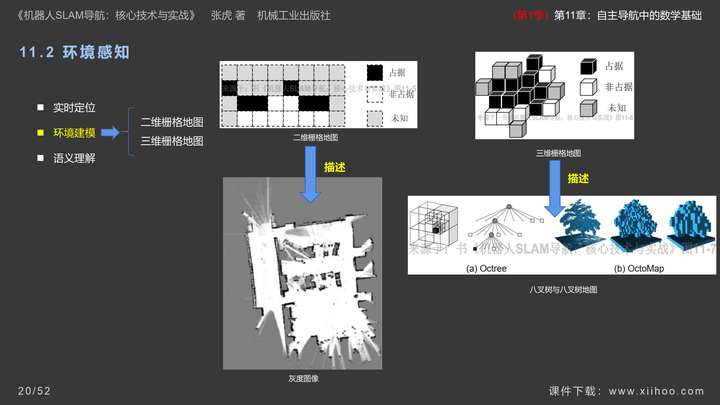
②环境建模
③语义理解

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
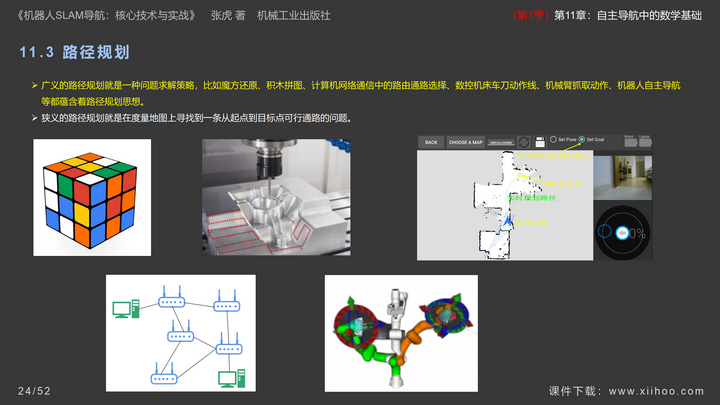
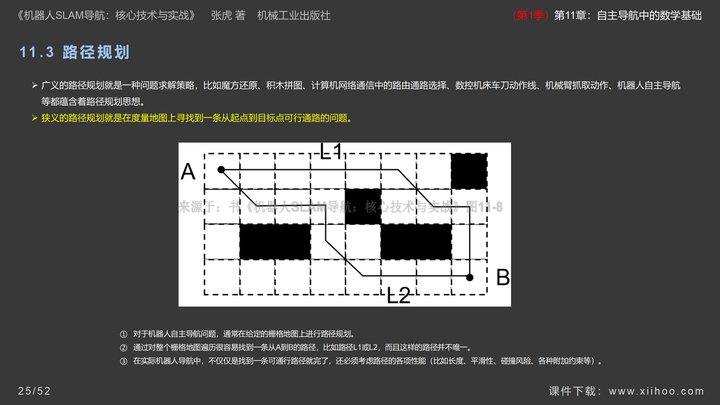
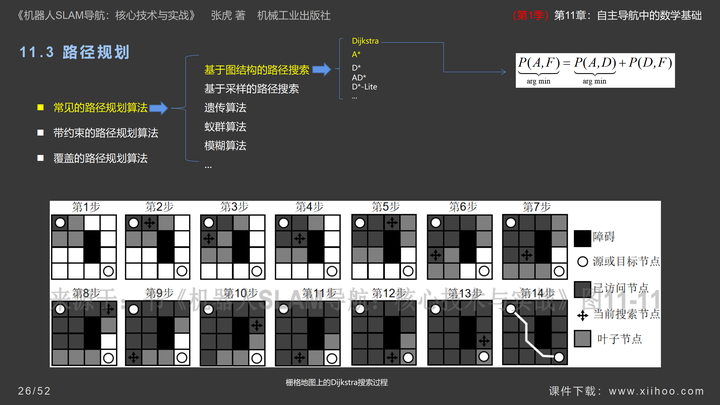
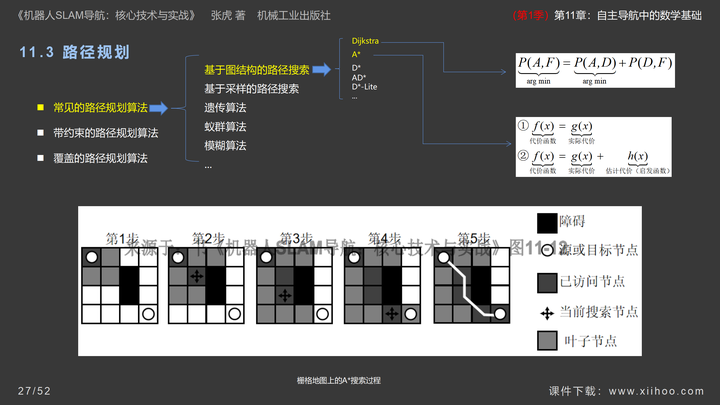
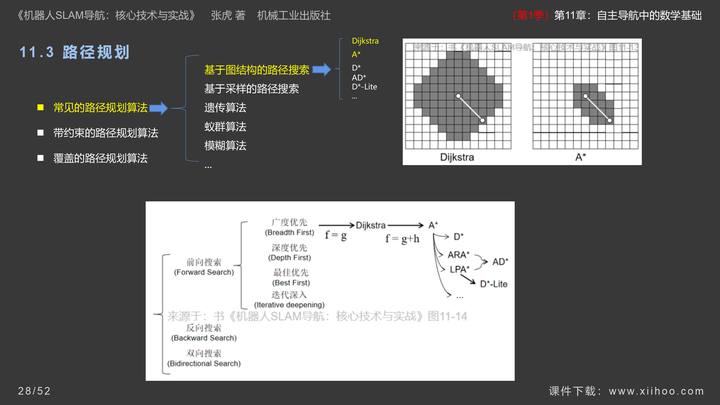
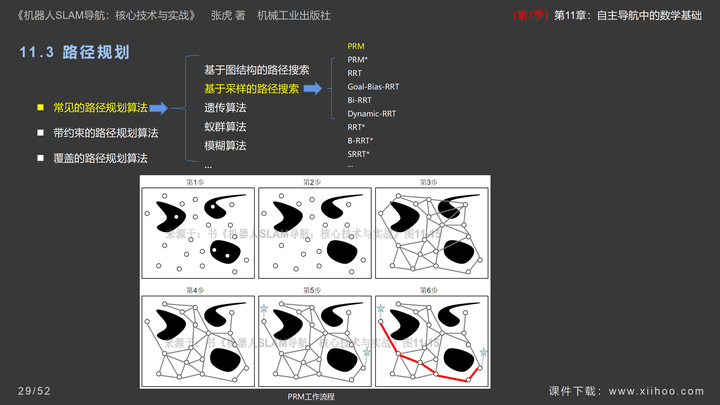
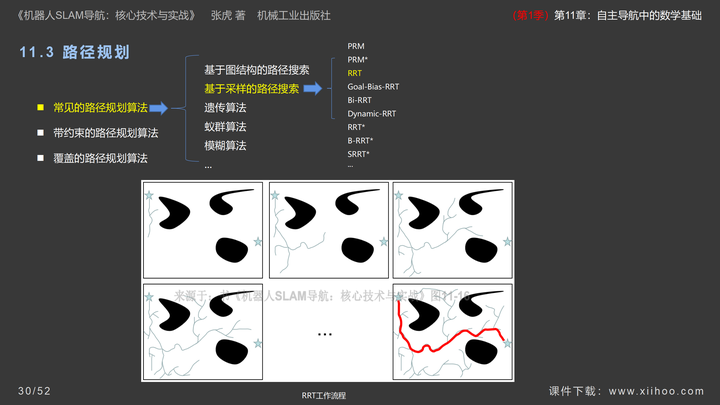
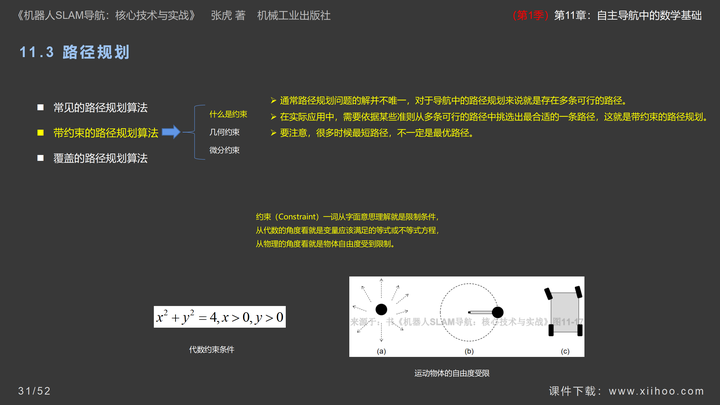
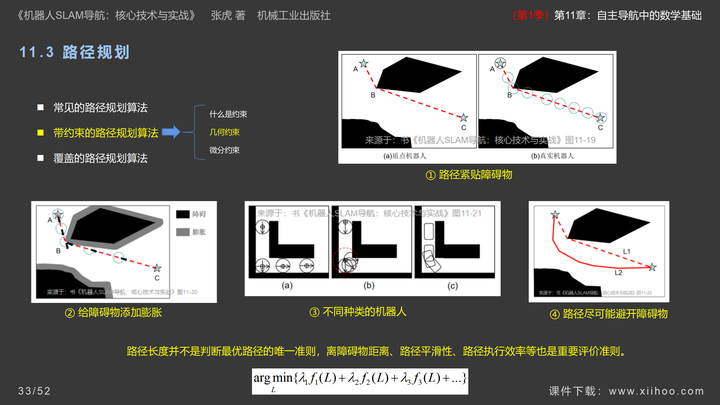
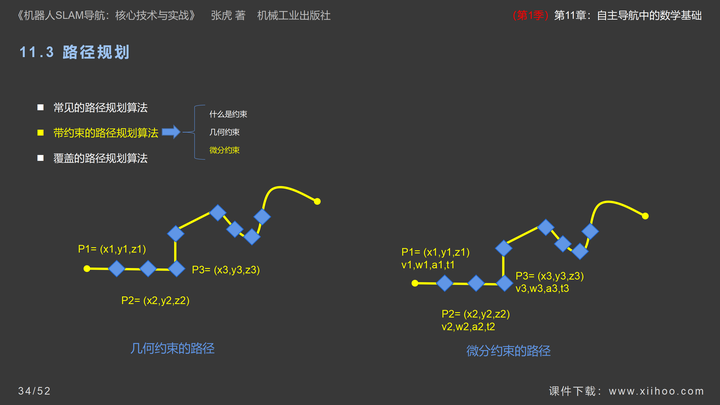
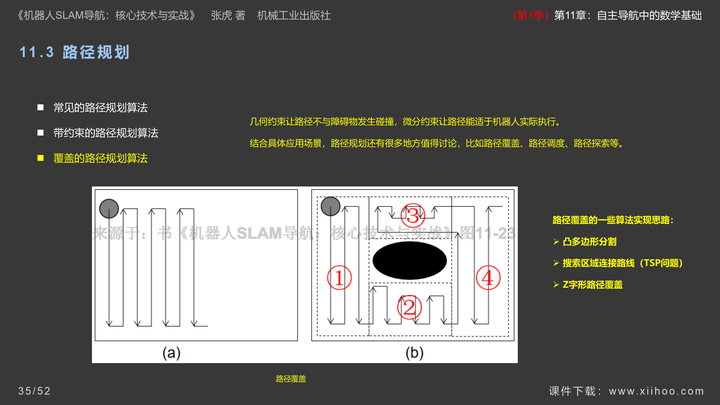
11.3 路径规划
①常见的路径规划算法
②带约束的路径规划算法
③覆盖的路径规划算法
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
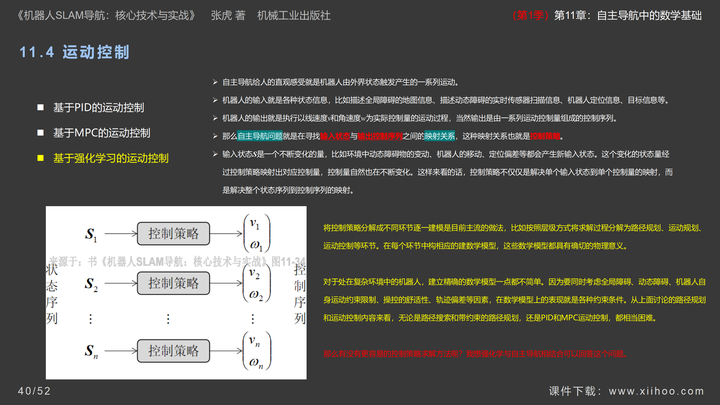
11.4 运动控制
①基于PID的运动控制
②基于MPC的运动控制
③基于强化学习的运动控制

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
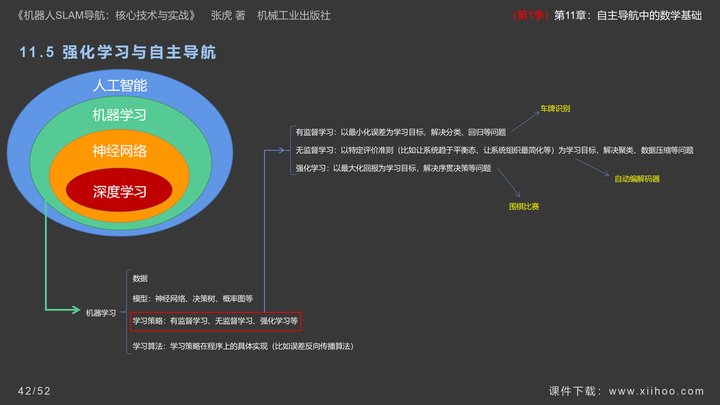
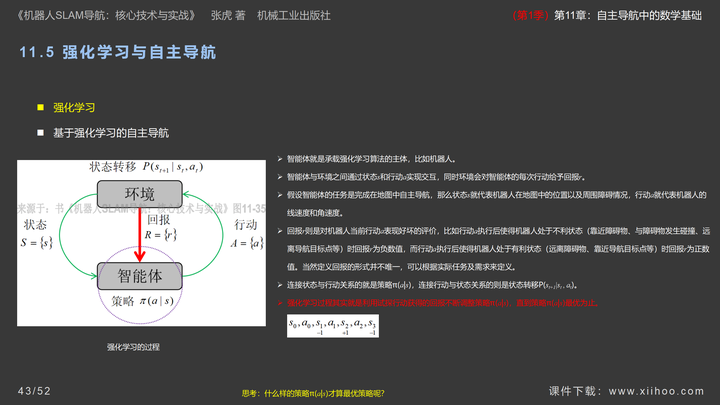
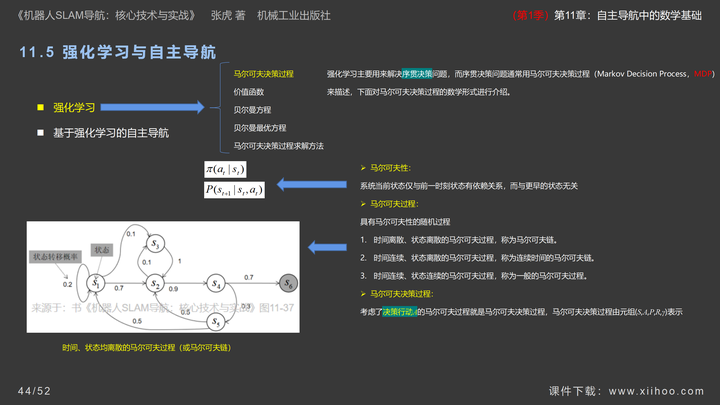
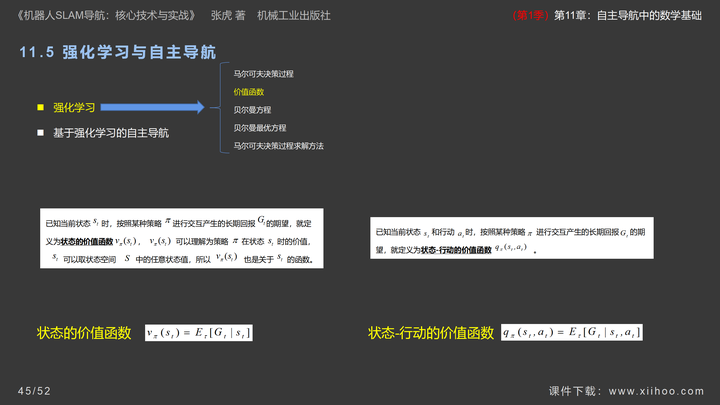
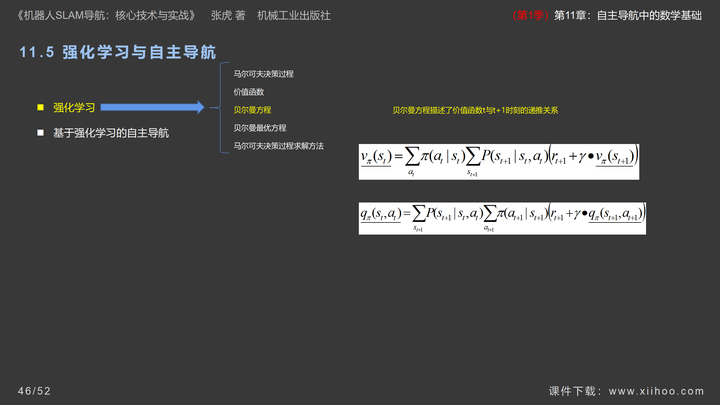
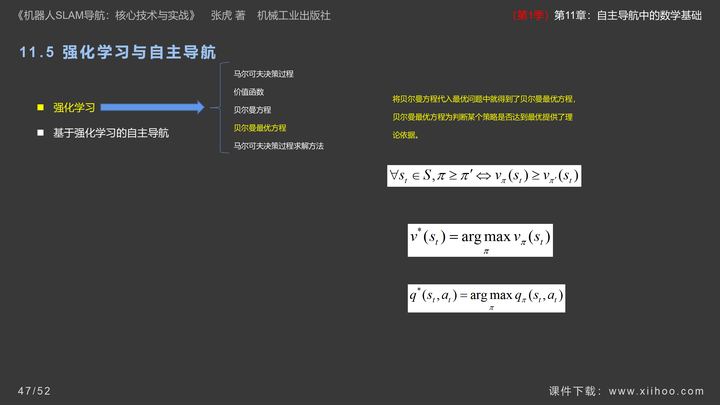
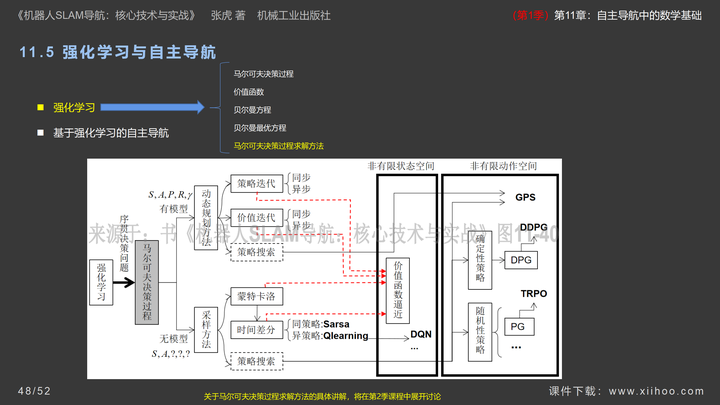
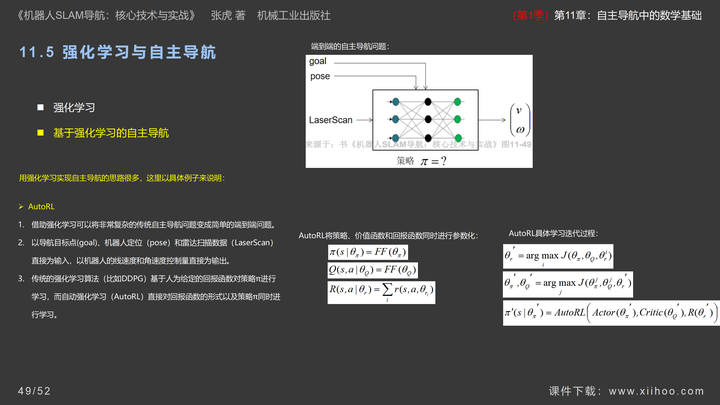
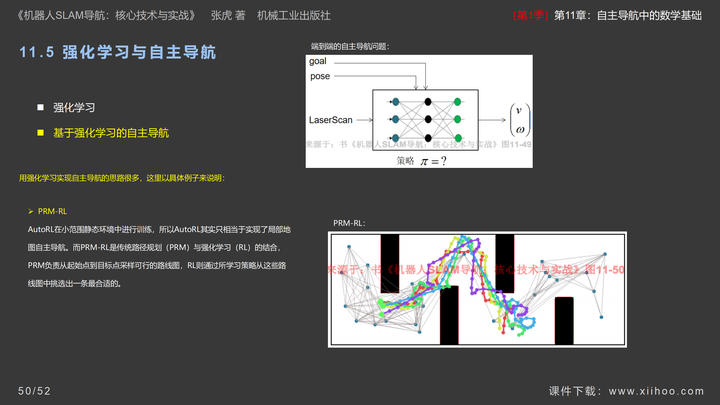
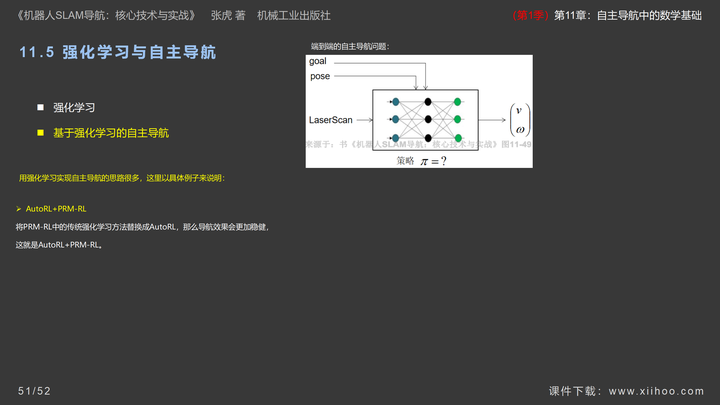
11.5 强化学习与自主导航
①强化学习
②基于强化学习的自主导航
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
例程源码下载
-
Github下载:github.com/xiihoo/Books_Robot_SLAM_Navigation
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
http://xiihoo.com/static/file/PPT/1-%E7%AC%AC1%E5%AD%A3%EF%BC%9A%E7%AC%AC11%E7%AB%A0_%E8%87%AA%E4%B8%BB%E5%AF%BC%E8%88%AA%E4%B8%AD%E7%9A%84%E6%95%B0%E5%AD%A6%E5%9F%BA%E7%A1%80.pptx
PDF课件下载:
http://xiihoo.com/static/file/PPT/1-%E7%AC%AC1%E5%AD%A3%EF%BC%9A%E7%AC%AC11%E7%AB%A0_%E8%87%AA%E4%B8%BB%E5%AF%BC%E8%88%AA%E4%B8%AD%E7%9A%84%E6%95%B0%E5%AD%A6%E5%9F%BA%E7%A1%80.pdf