汇川PLC学习Day3:轴控代码编写、用户程序结构说明与任务配置示例、用户变量空间与编址
一、新建轴与轴控代码编写
1. 新建轴
(1)新建一个轴
(2)将轴名字更新为实际名字
可以后面实例化后再更改,汇川可以在更新名字时同步更新其他编写的代码名字,汇川一大优点。

- 新增轴名为“Axis_1”的伺服,此名在后面代码只需引用指向即可
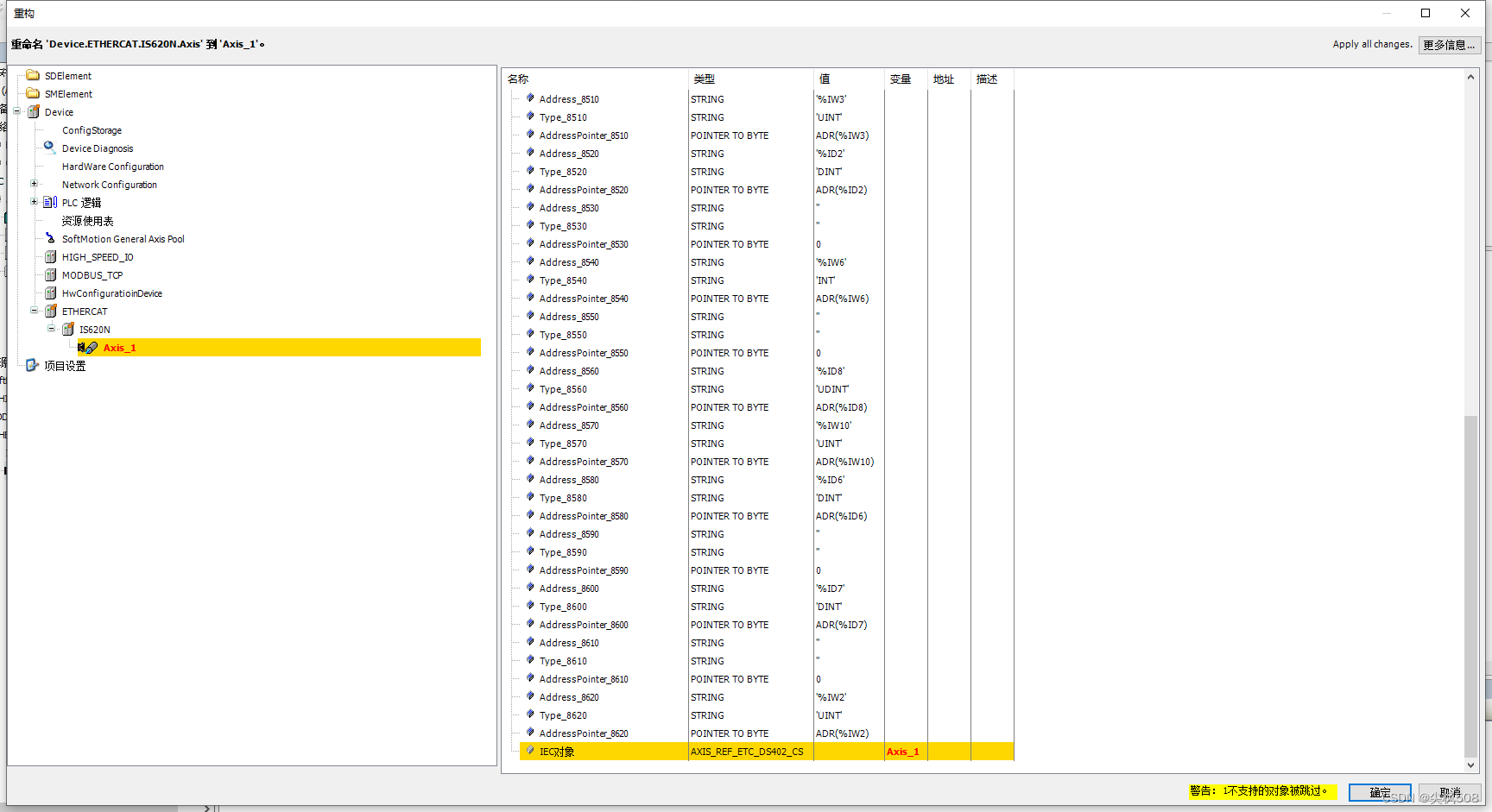
最后确定
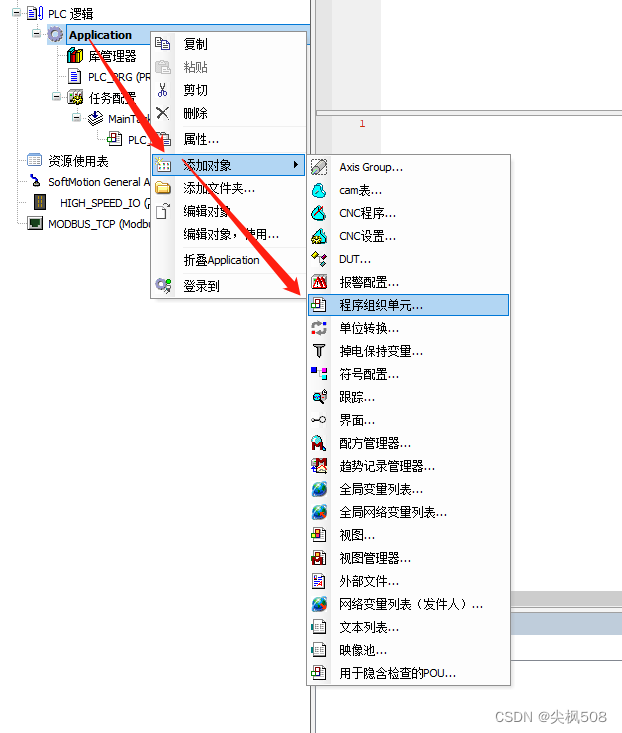
2. 新建轴控代码文件

3. 轴功能块(轴FB)实例
汇川的轴功能块比三菱而言,代码开发简化了不少流程(相对于如没有轴控FB块的三菱PLC),其不需要了解里面的通讯低层哪个缓存地址代表何种含义,只需拖出来使用即可。
如果自己写一个轴控FB功能块,会相当耗时耗力,可能还会有Bug甚至不稳定。
以下轴功能块实例方法:
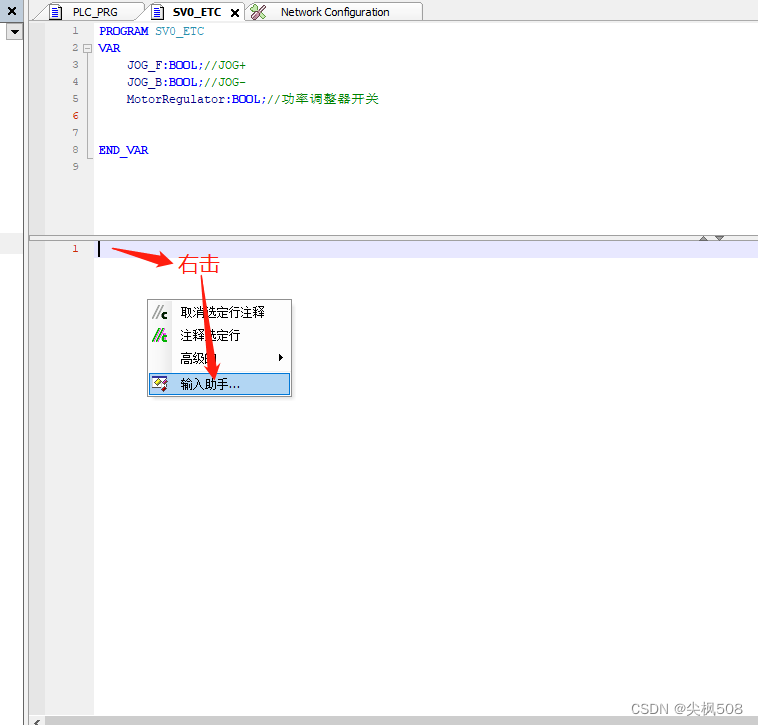
- 上面一栏用于变量定义,下面一栏用于代码编辑。
- 这里直接建立好了JOG+/JOG-/调功器开关的三个布尔变量。
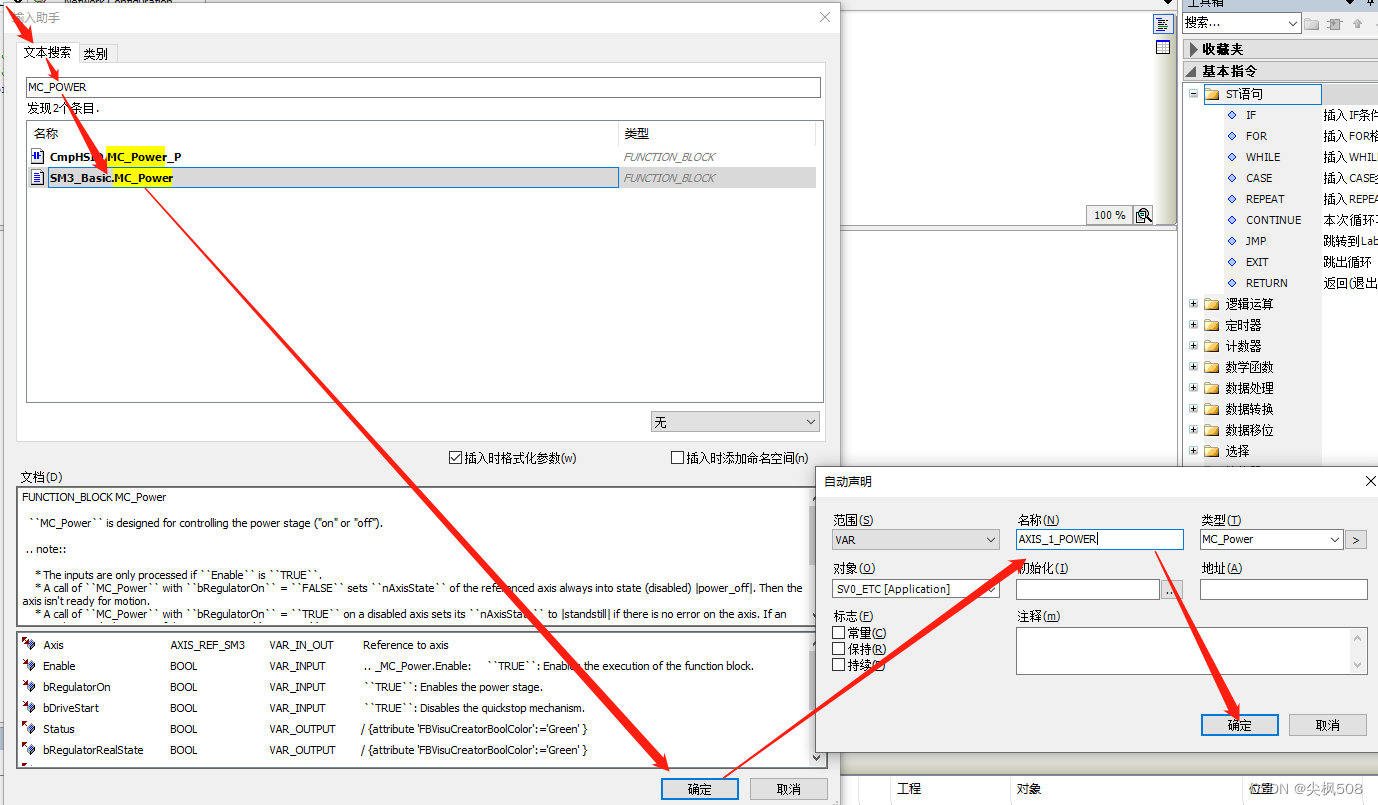
(1)MC_POWOR实例
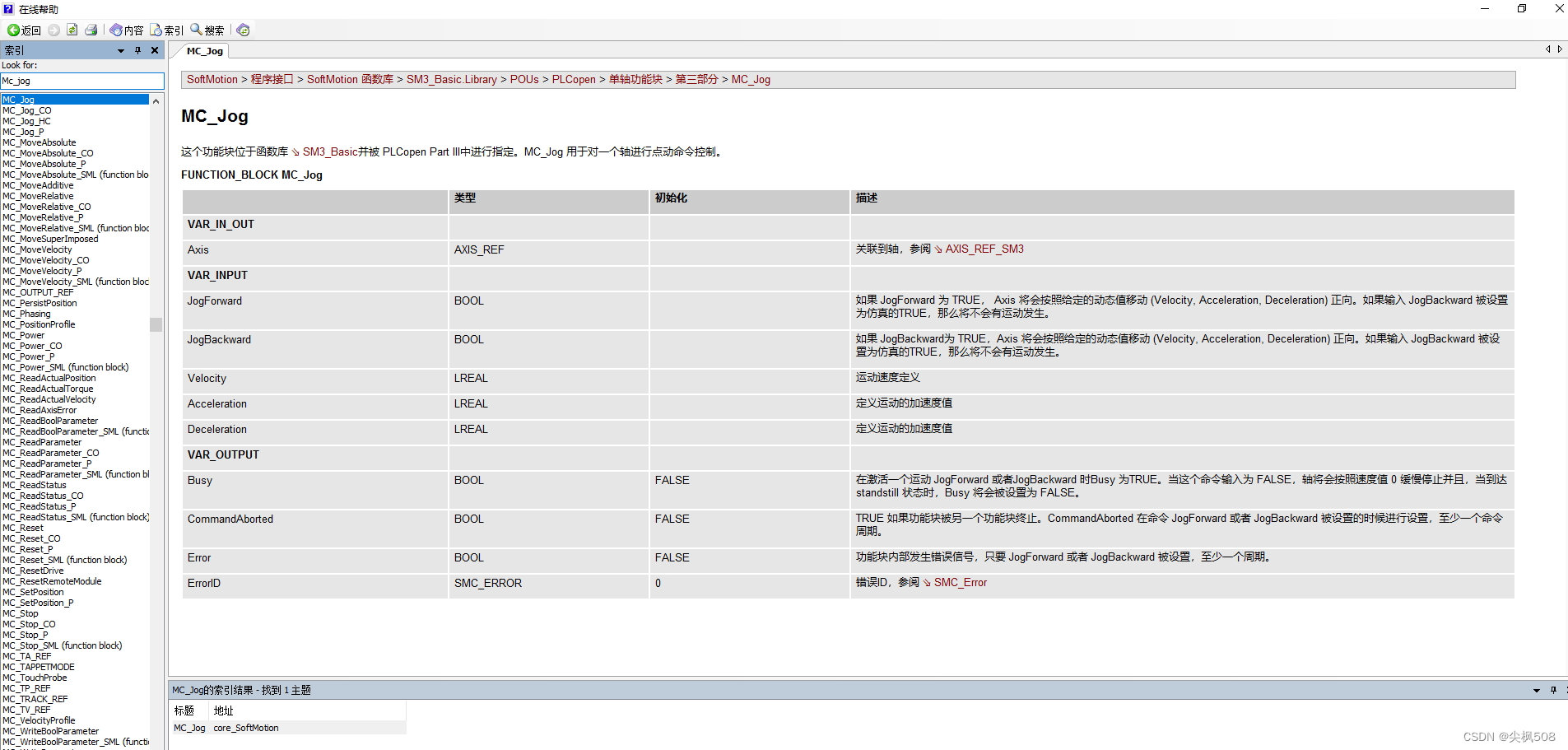
(2)MC_JOG实例

4. 代码 “填空”
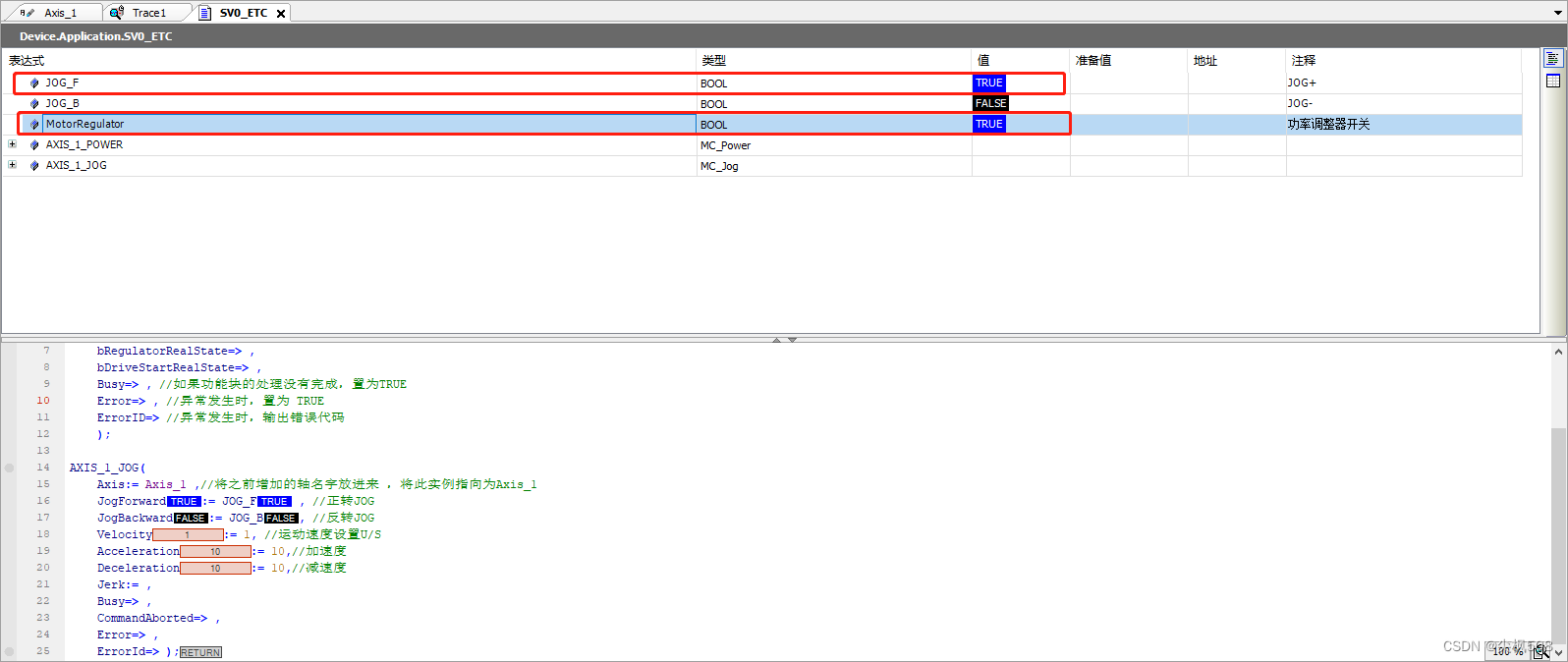
当功能块实例出来后,将代码变量指向Axis_1及其相关内容
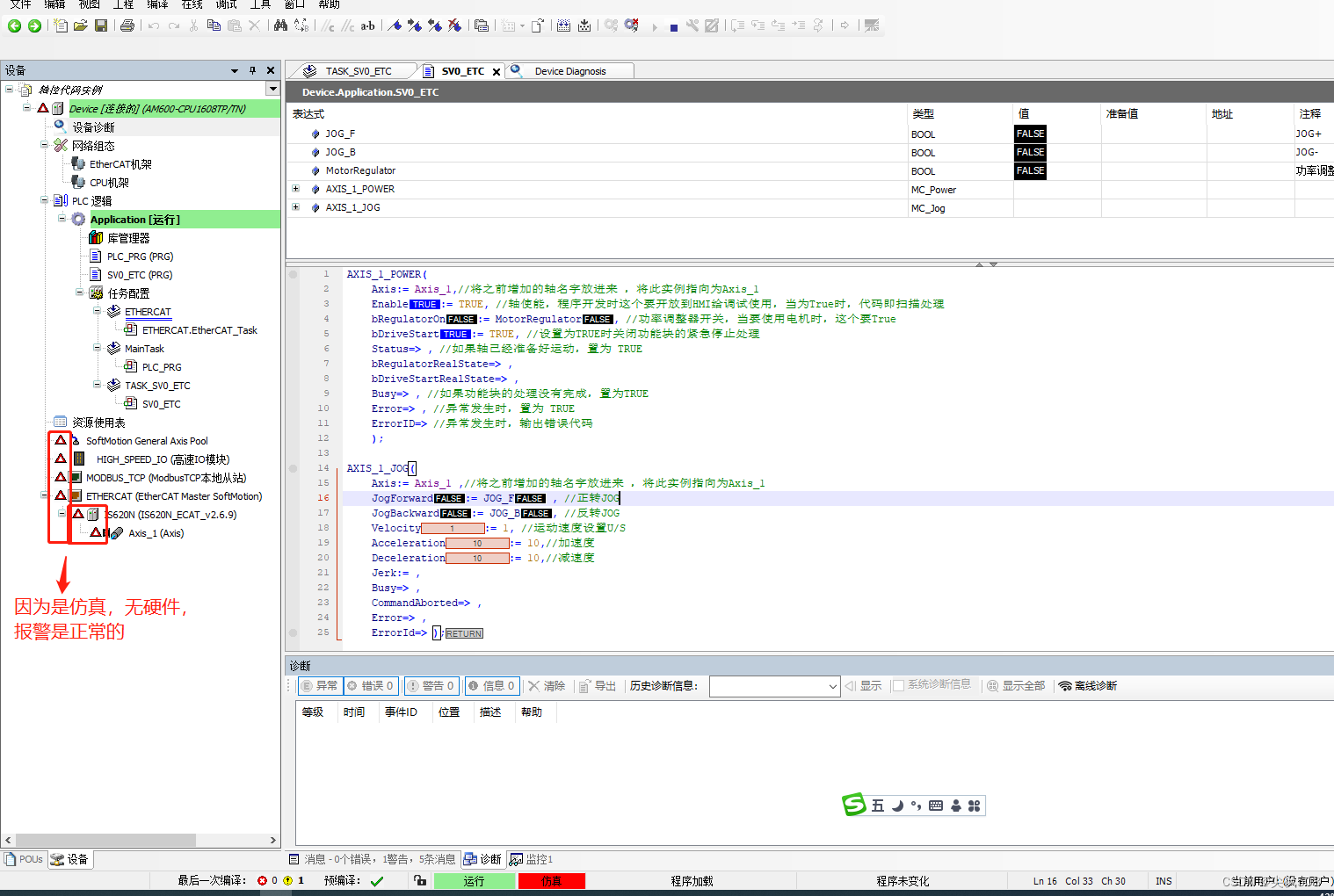
PROGRAM SV0_ETC
VARJOG_F:BOOL;//JOG+JOG_B:BOOL;//JOG-MotorRegulator:BOOL;//功率调整器开关AXIS_1_POWER: MC_Power;AXIS_1_JOG: MC_Jog;
END_VARAXIS_1_POWER(Axis:= Axis_1,//将之前增加的轴名字放进来 ,将此实例指向为Axis_1Enable:= TRUE, //代码使能,当为True时代码才有效,代码才作扫描处理bRegulatorOn:= MotorRegulator, //功率调整器开关,当要使用电机时,这个要TruebDriveStart:= TRUE, //设置为TRUE时关闭功能块的紧急停止处理Status=> , //如果轴已经准备好运动,置为 TRUEbRegulatorRealState=> , bDriveStartRealState=> , Busy=> , //如果功能块的处理没有完成,置为TRUEError=> , //异常发生时,置为 TRUEErrorID=> //异常发生时,输出错误代码);AXIS_1_JOG(Axis:= Axis_1 ,//将之前增加的轴名字放进来 ,将此实例指向为Axis_1 JogForward:= JOG_F , //正转JOGJogBackward:= JOG_B, //反转JOGVelocity:= 1, //运动速度设置U/SAcceleration:= 10,//加速度 Deceleration:= 10,//减速度 Jerk:= , Busy=> , CommandAborted=> , Error=> , ErrorId=> );
所以汇川轴控制非常方便,只需要把代码里实例时,实例的轴名字指向组态创建的轴名字即可,不需要知道如三菱电机的缓存地址作用和不用另做轴控制FB功能块。
以上是控制轴JOG功能的代码,真正开发可能要用上以下功能块
MC_ReadStatus; //读取状态功能块
MC_Power; //使能功能块
MC_Jog; //Jog功能块
MC_Home; //原点搜索功能块
MC_MoveVelocity; //位置\速度模式下速度控制功能块
MC_MoveAbsolute; //绝对定位功能块
MC_MoveRelative; //相对定位功能块
MC_Reset; //错误复位功能块
SMC3_ReinitDrive; //错误复位功能块
MC_Halt; //轴暂停功能块
MC_Stop; //轴停止功能块
MC_TouchProbe; //探针功能块
SMC_SetControllerMode;
MC_AbortTrigger;
TRIGGER_REF;
SMC_ERROR; // 设定伺服轴当前模式报警ID
当然,如果我们对这些功能块的引脚(或者函数形参)不清楚时,可以使用“”帮助-索引“,输入相关功能块名字(或者函数名)查看其对应解释及其用法
5. 添加到运行任务中
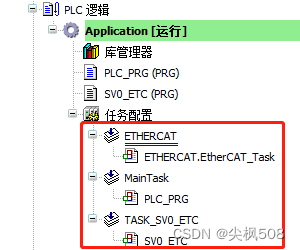
新增的程序文件(SVO_ETC)未在任务配置中时,其文件名为灰色的,需要将其添加到任务中去代码才会扫描
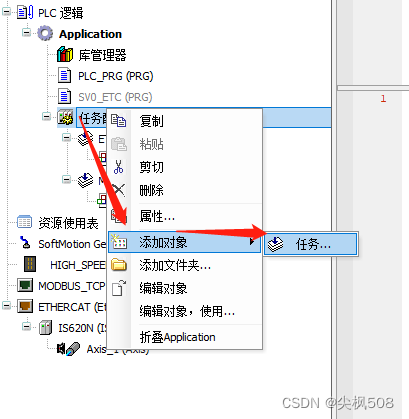
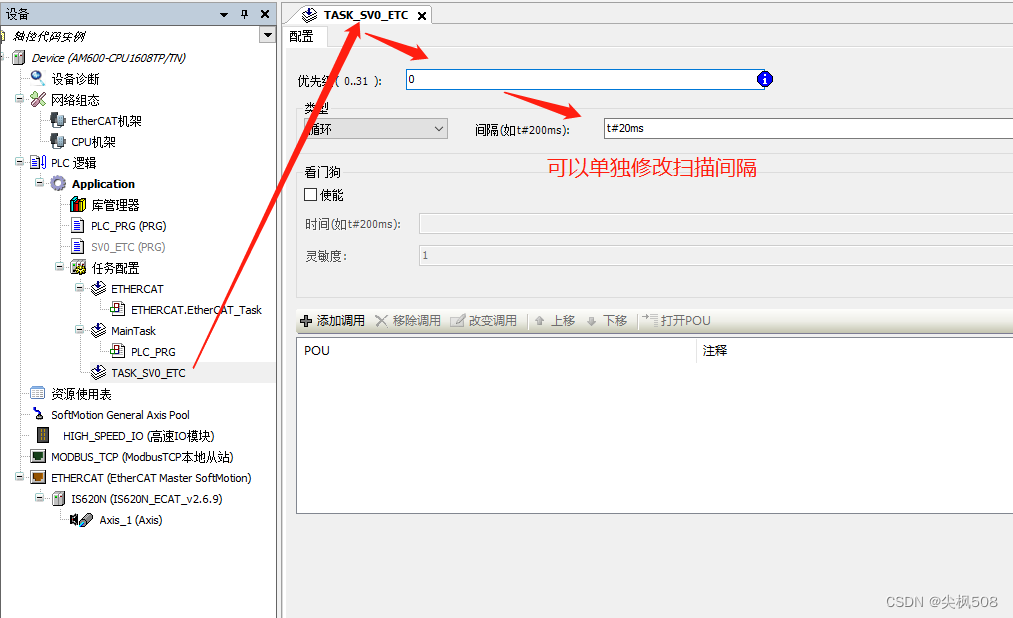
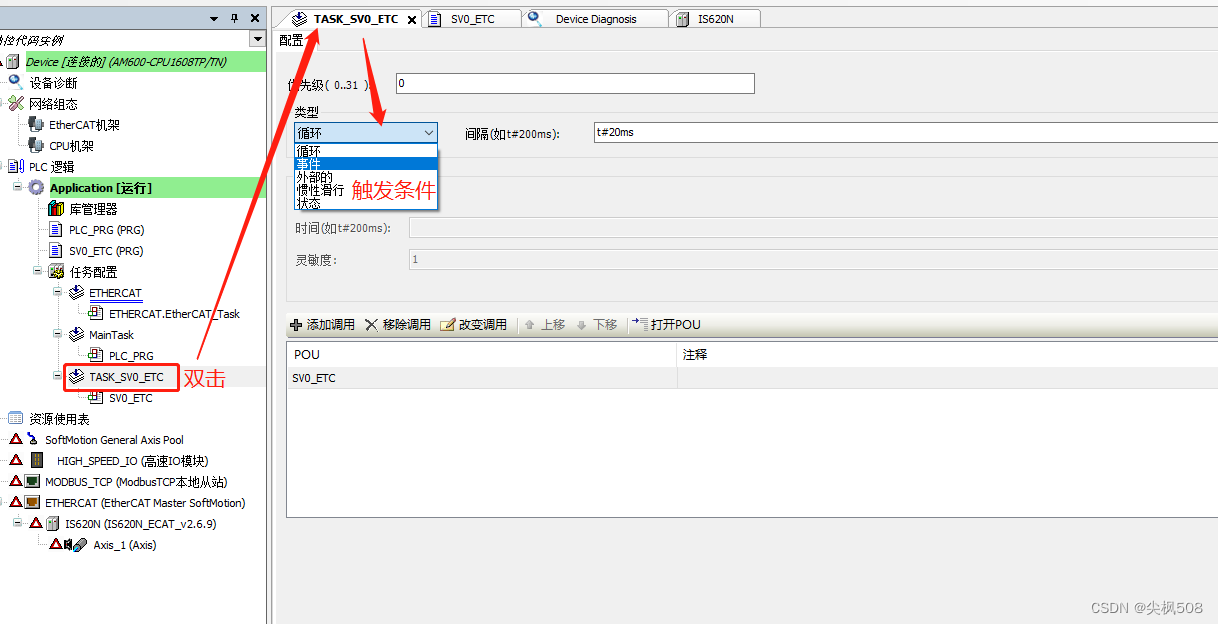
- 双击任务配置,可以单独修改扫描间隔
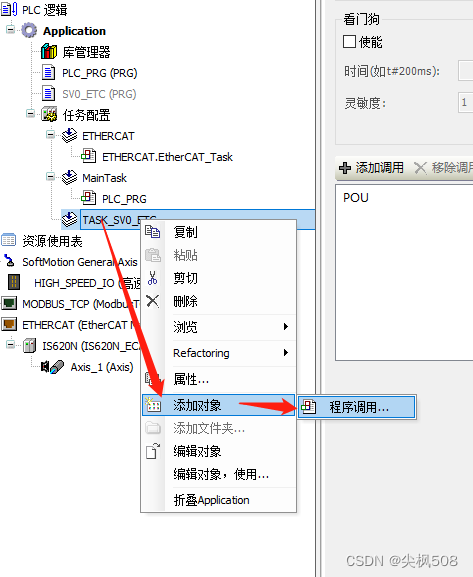
- 加入任务程序文件
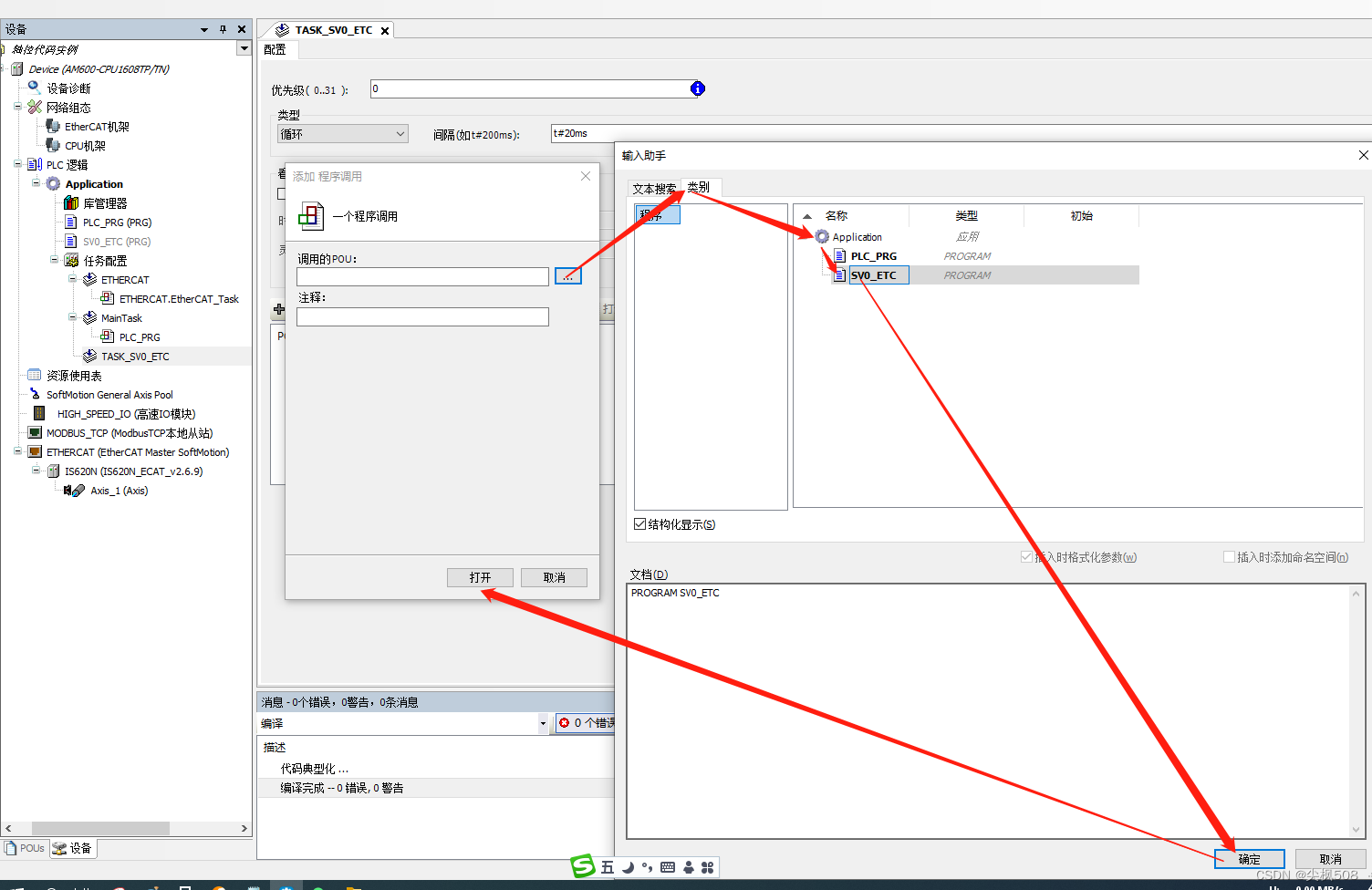
- 选择要加入任务的程序,加入后程序文件名将变为蓝色
注:使用Ether_Cat通讯的设备必须放在Ether_Cat任务中,以上只作介绍添加程序任务使用
6. 仿真与跟踪任务运行
============

================
6.1 仿真
因为没有实物,用仿真只能勾选虚轴模式

- 仿真图
进入仿真,将正转与调功器置ON并将其写入
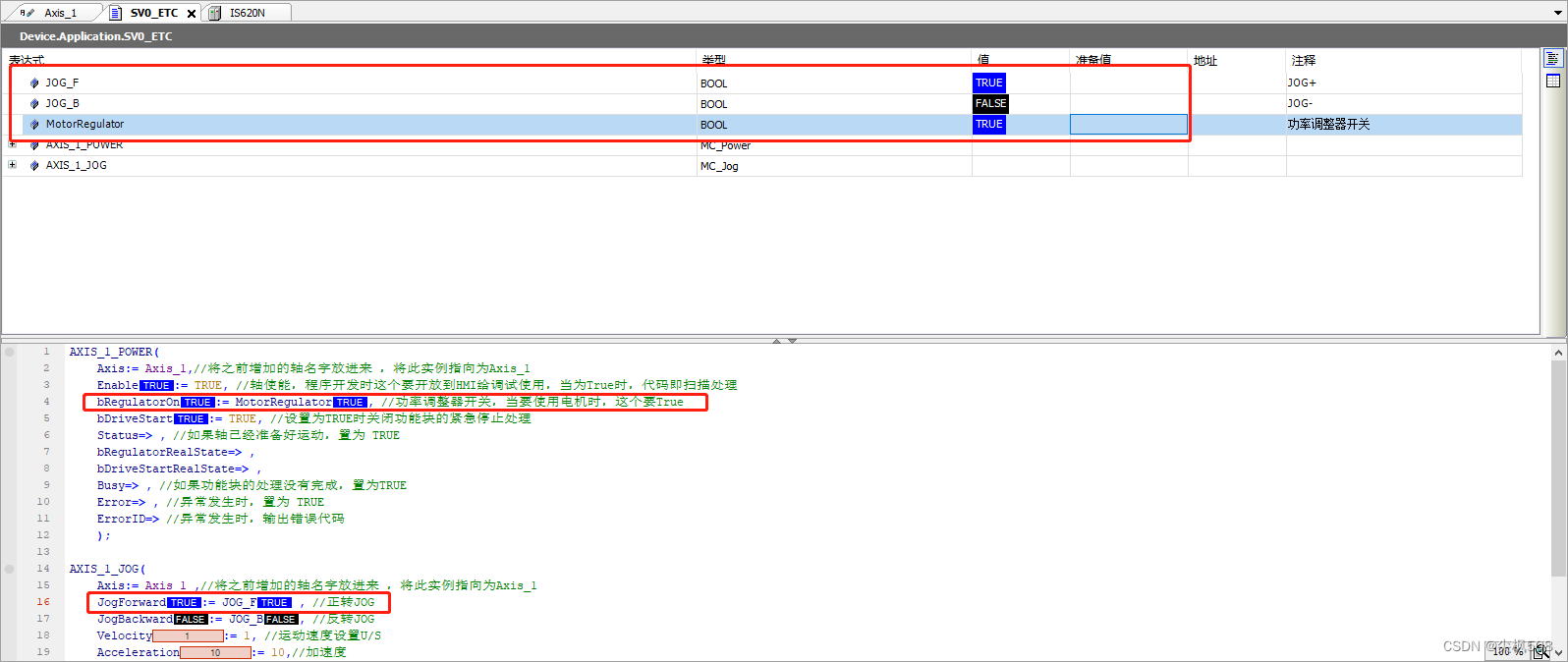
可以监控到仿真的轴位置在动作增加

- 仿真图
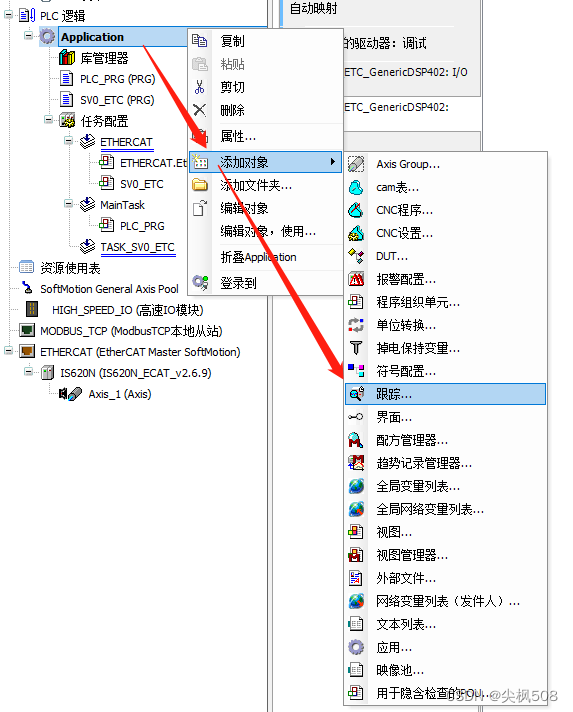
6.12跟踪任务
可以添加变量”跟踪”以查看轴的各种运行状态,这是个很好用的工具,可以查看代码运行时序。
(1)新增跟踪任务


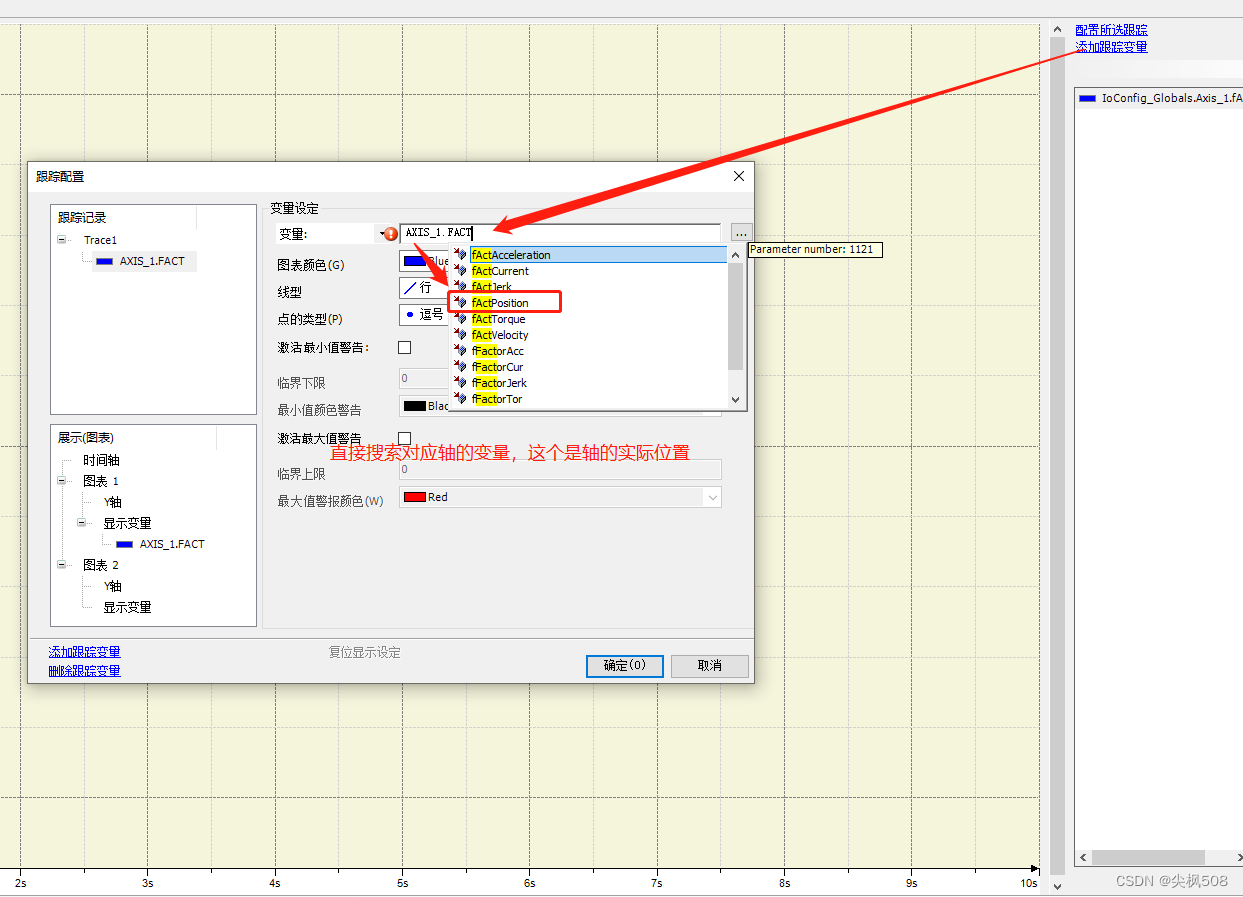
注:监控的变量名是不允许中文的!中文标签变量名无法监控
(2)进入仿真状态,去“跟踪”-“下载监控”
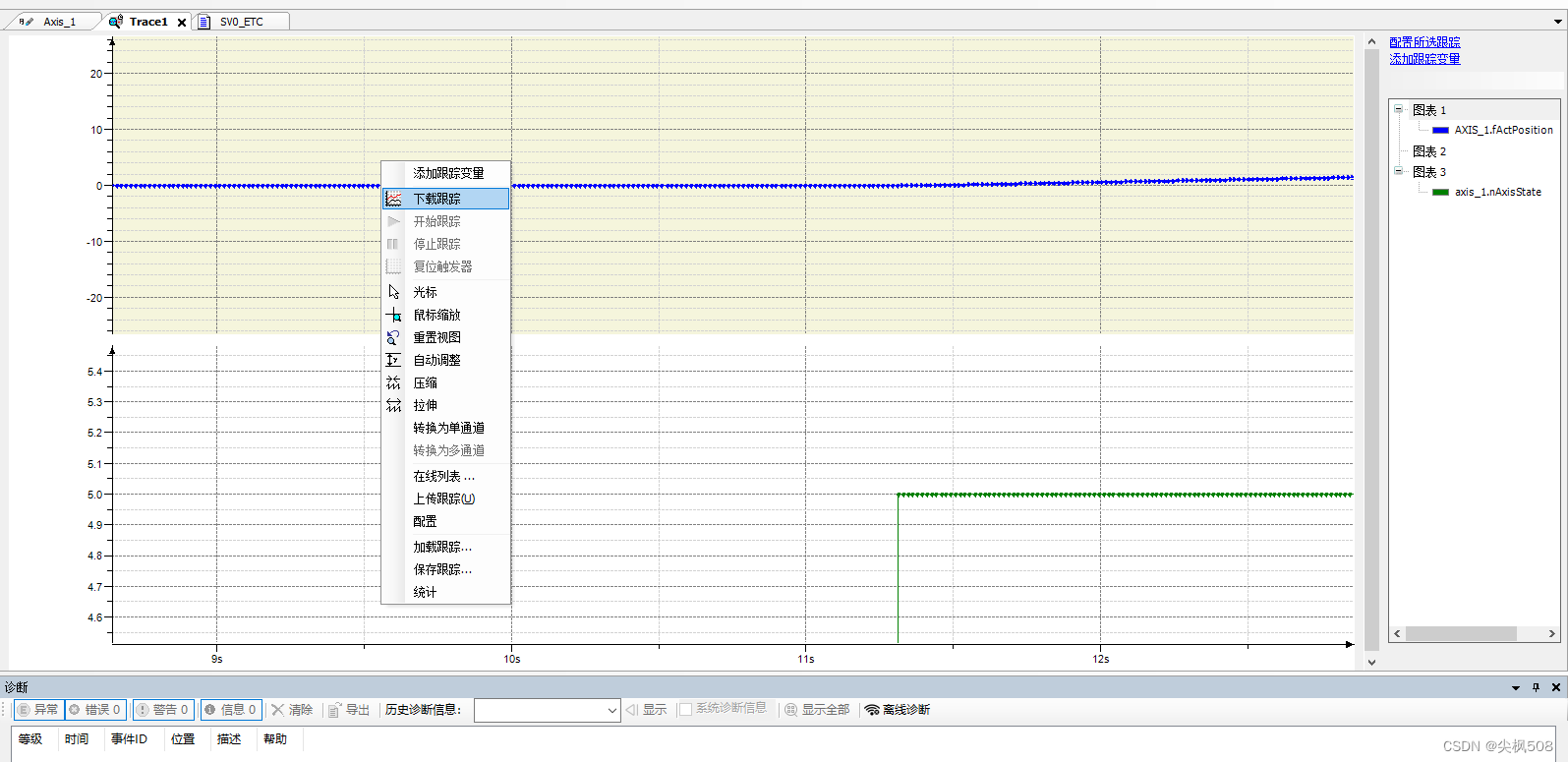
(3)启动程序运行,随后将正转与调功器置ON并将其写入
此时,即可捉到程序运行情况
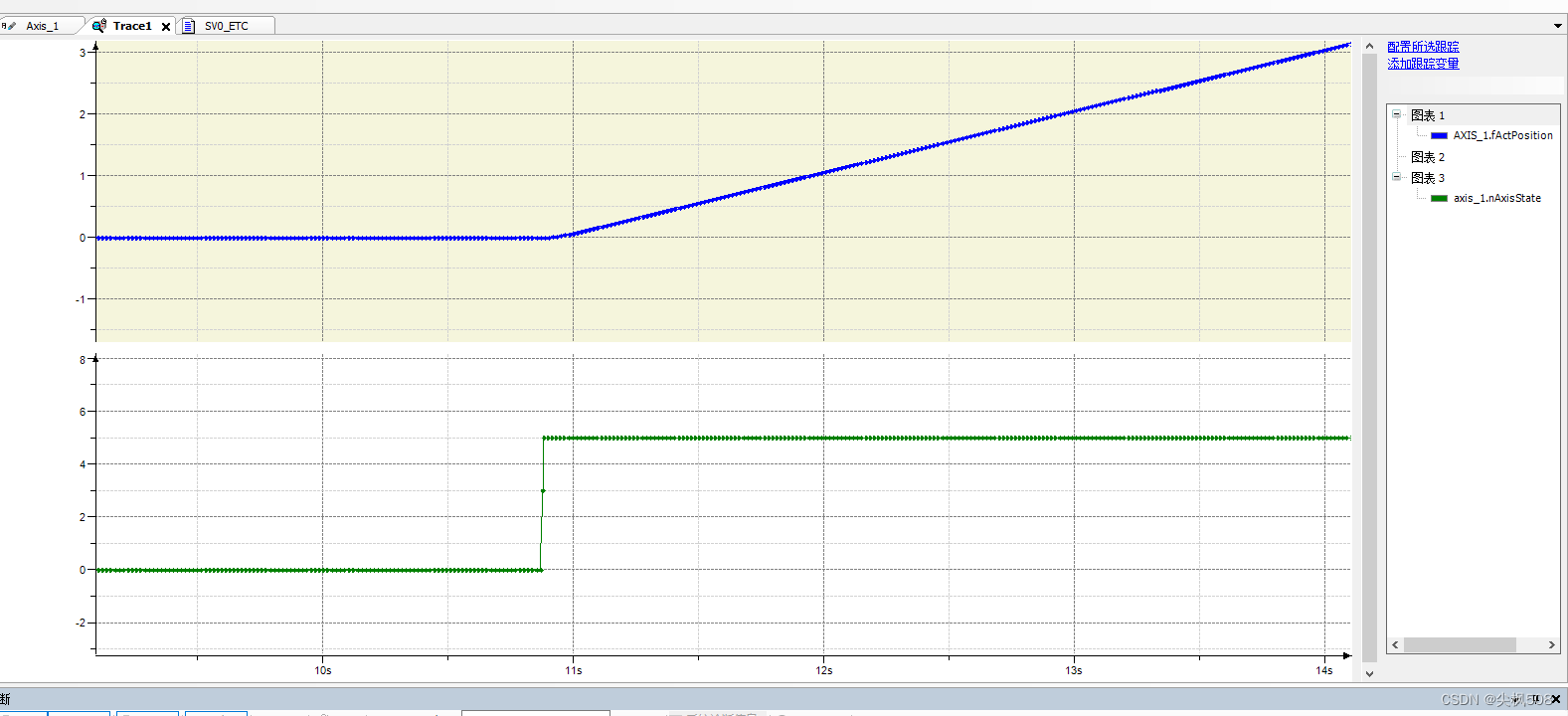
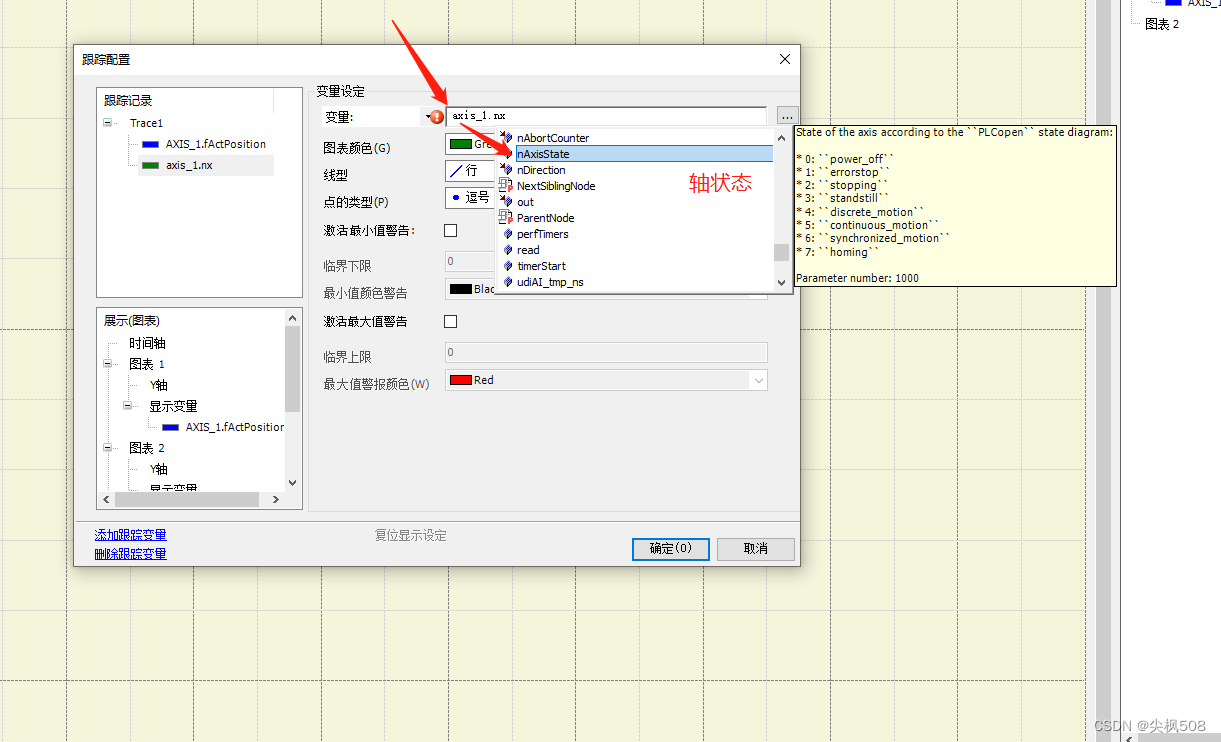
(4)常用轴监控参数

7. POU、功能块FB、函数FC三者之间的关系
(1)程序文件POU
如上,我们跑马灯程序文件和伺服控制程序文件都是属于逻辑代码文件,其任务可以单独有不同的扫描执行周期、不同的触发条件
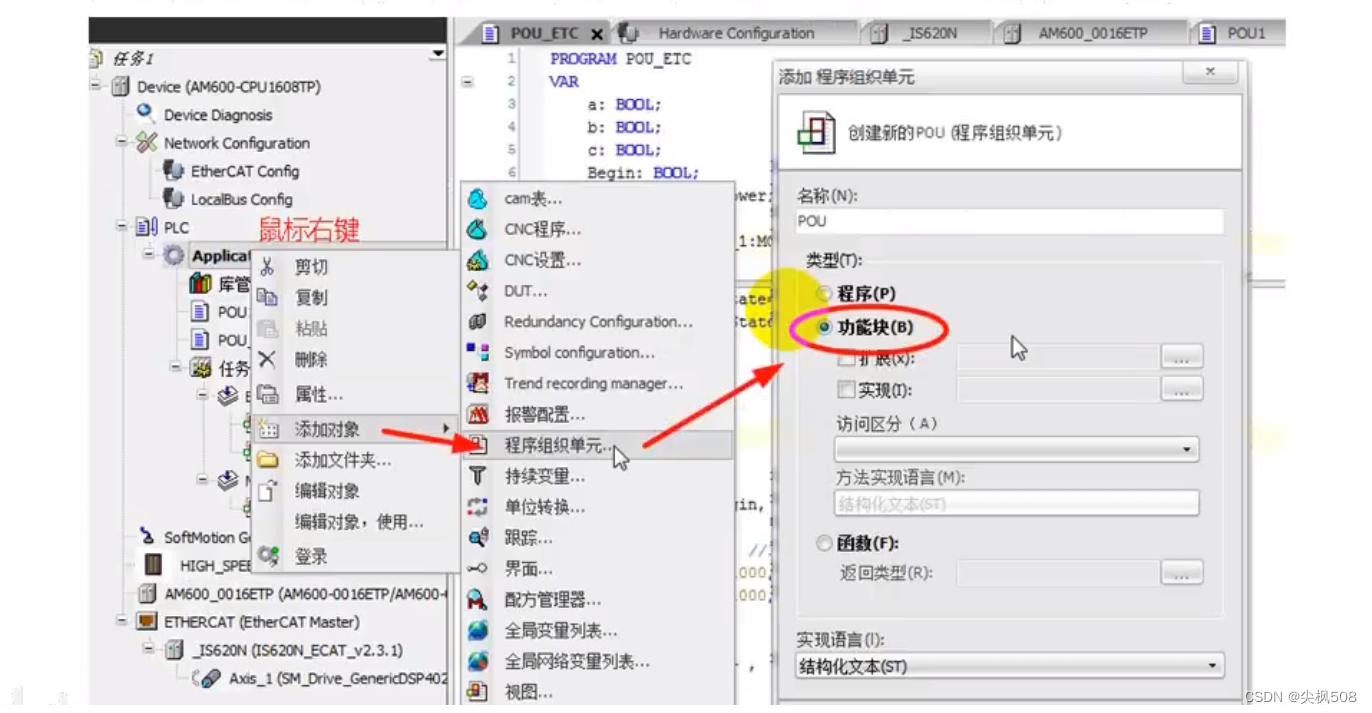
(2)功能块 (FB)
A ) 功能块 (FB)概念
伺服点动POU程序中,使用了系统提供的MC POWER、MC JOG功能块
使用的方法是:
a) 利用MC_POWER、MC JOG功能块作为模板分别定义了AXIS_1_POWER、AXIS_1_JOG两个命令操作块, (也称为MC POWER、MC JOG功能块实例)
b) 对实例的操作块,加入所需的控制变量
推而广之,若有多个伺服,可以创建多个功能块实例,分别加入对应的控制变量
B)功能块的特性一一功能封装
以MC POWER功能块为例,该功能块的完成的功能是用EtherCAT总线对指定伺服从机的“使能操作”,将操作程、成功与否、出错原因等一一列出来,供用户查询。
如果是自己编程,完成同样的功能,需有如下操作
命今准备,按COE规范制备通讯数据
EtherCAT通讯的PDO/SDO的通讯写操作,命令伺服使能
对EtherCAT通讯的PDO/SDO的通讯应答解析
将操作状态、结果存放于特定数据结构数组
可能的异常处理
MC POWER中就封装了这些操作,而我们只需简单调用这个功能块就可以,无需了解其中的技术细节
C)功能块的特性一提高编程效率
若应用系统中有多个伺服,可以创建多个功能块实例,分别加入对应的控制变量,就可以对多个何服进行控制了。
功能块如一个模板,可以复制多个相似的功能块实例,去分别对不同的对象,进行操作处理。这样可减少相似编程代码的反复编写,提高编程效率。
D) 定义自己的功能块
我们可以自己定义功能块,定义完成后就可以像使用编程系统提供的功能块一样,用于操作实例化
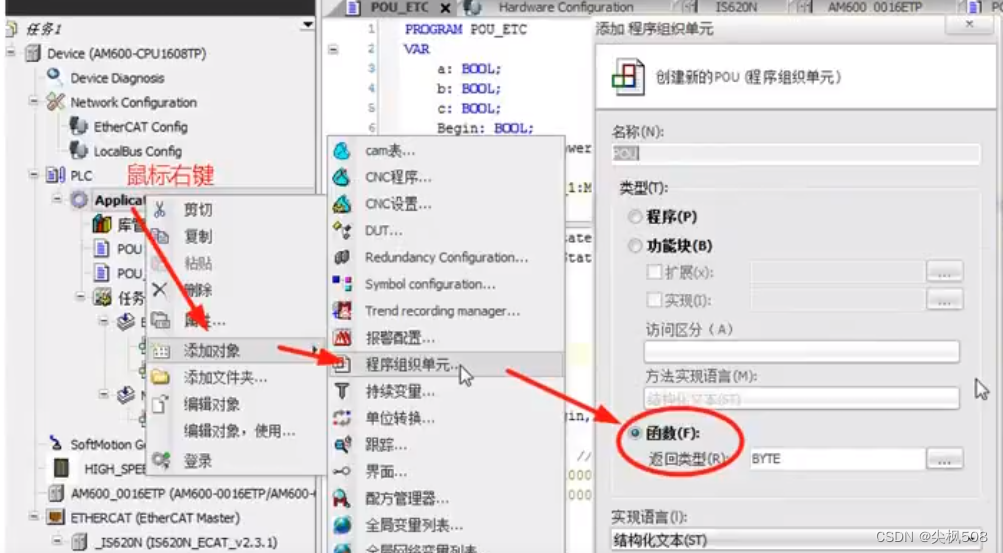
(3)函数(FUN)
可以将常用的处理子程序封装为函数FC,供POU或功能块FB调用。
FC不需要实例化,没有保留内存,每次调用的入口参数相同(把实参给形参),得到的反馈结果都会相同
===
程序POU、功能块FB、函数FC的三者比较

二、 用户程序结构说明、任务配置示例
1. 用户程序的典型结构与任务配置示例
即可以“同时”执行几个任务,也可以每个任务可以有不同的扫描执行周期、不同的触发条件。
-
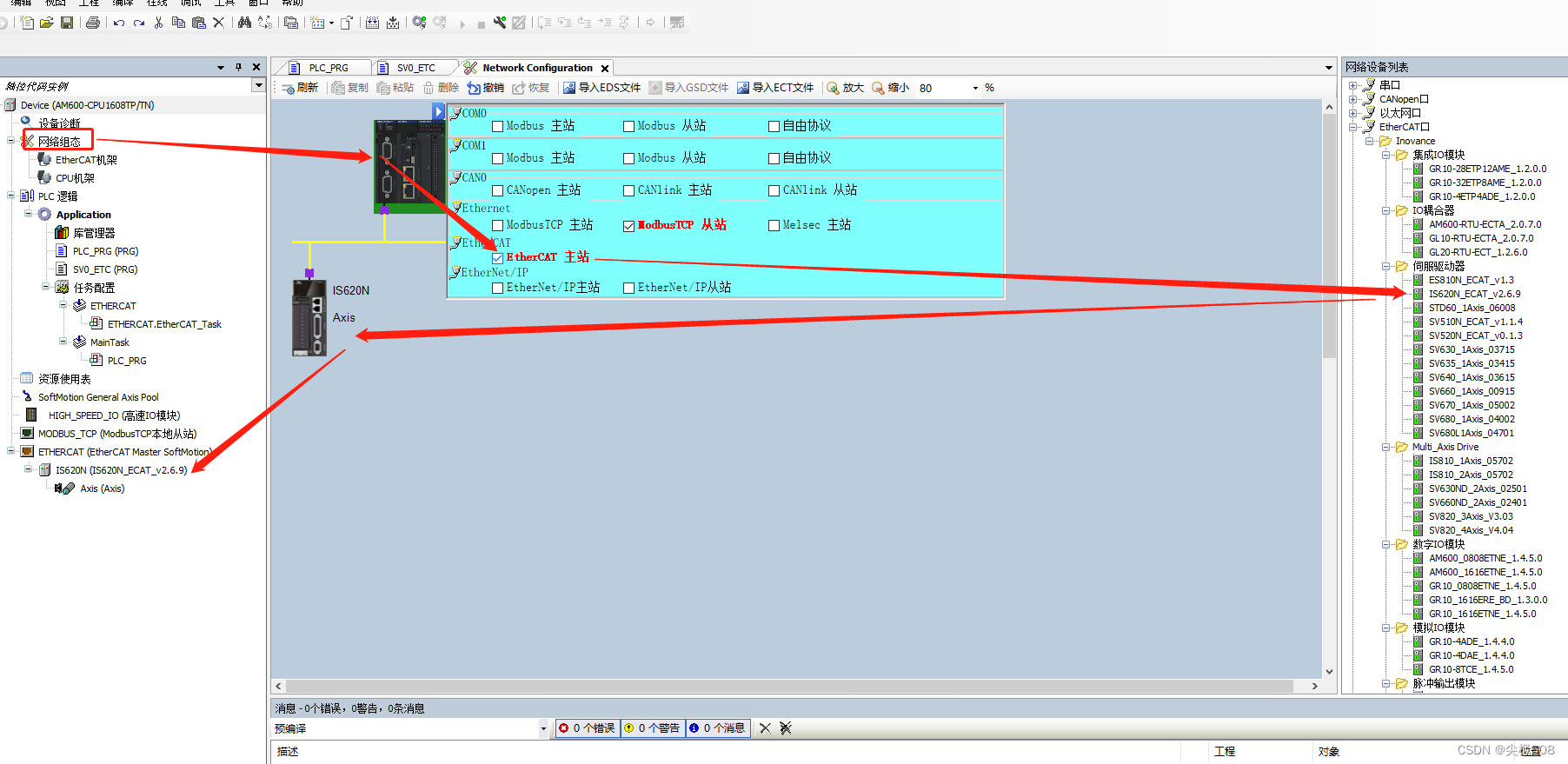
程序任务一一由单个或若千个POU组成
如下图,PLC_PRG可以是跑马灯程序 ,ETHERCAT.EtherCAT_TASK是以太网ETHERCAT任务,SVO_ETC是伺服控制程序
-
扫描时间一一任务配置(指定每个POU的执行周期)
任务配置示例 -
触发条件一一【周期循环、软件变量触发】或【定时触发(如EtherCAT中断)】或【硬件触发(如外部中断)】
任务配置示例
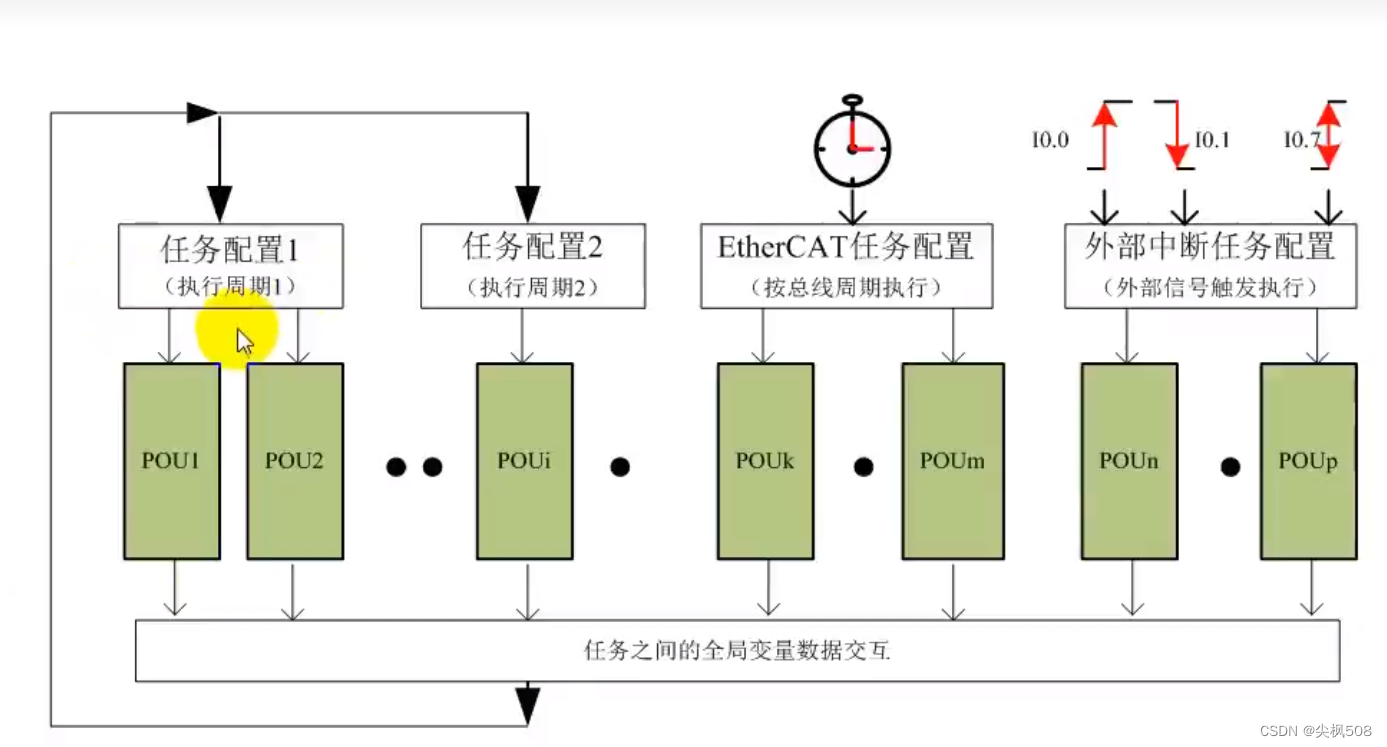
任务扫描流程图
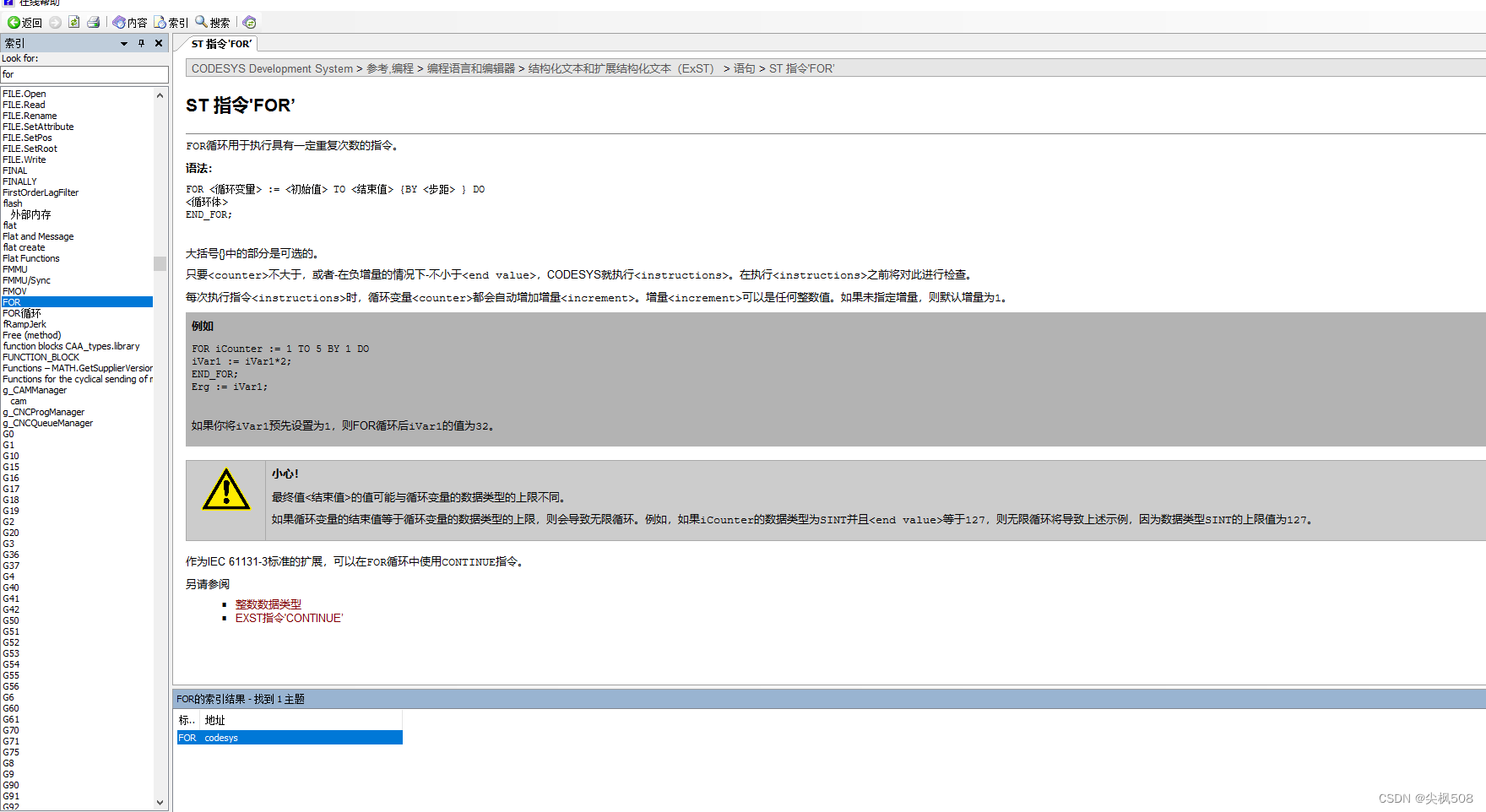
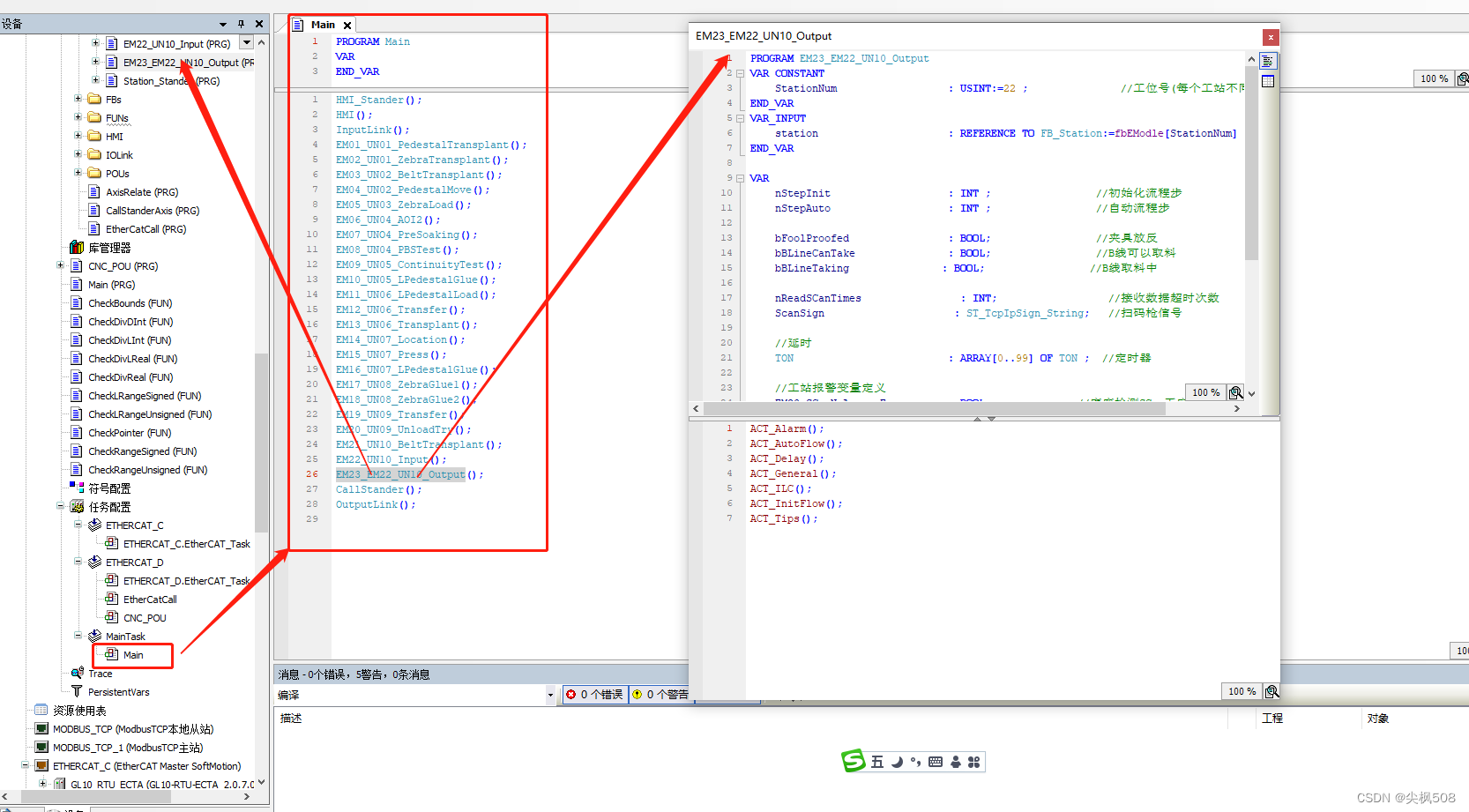
如果任务只用一个扫描循环就可以的话,可以直接在一个Main.Prg程序文件里调动所有的Pou子程序文件就可以,如下
三、 用户变量空间与编址
1. AM600系统提供给用户的变量内存一览其使用
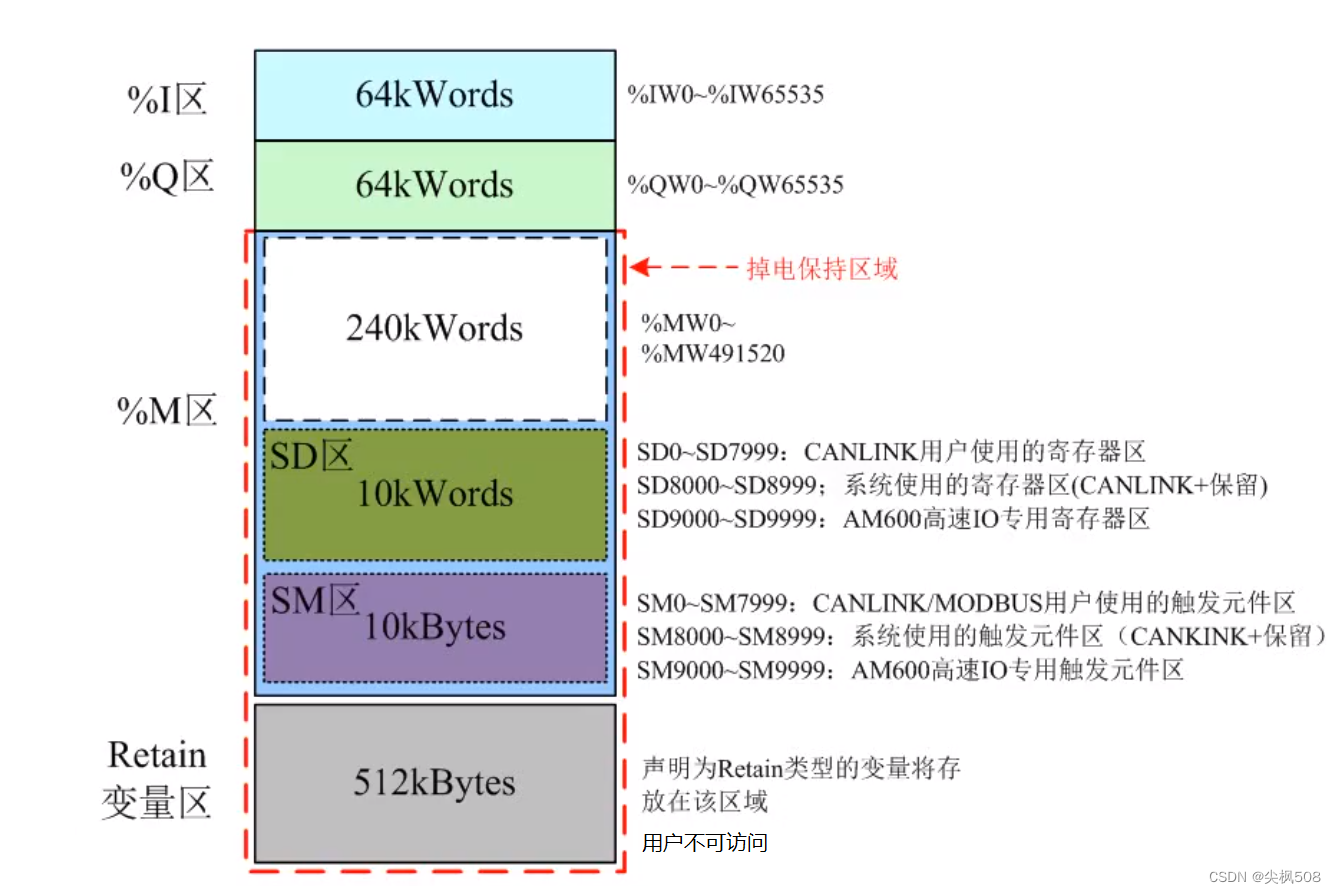
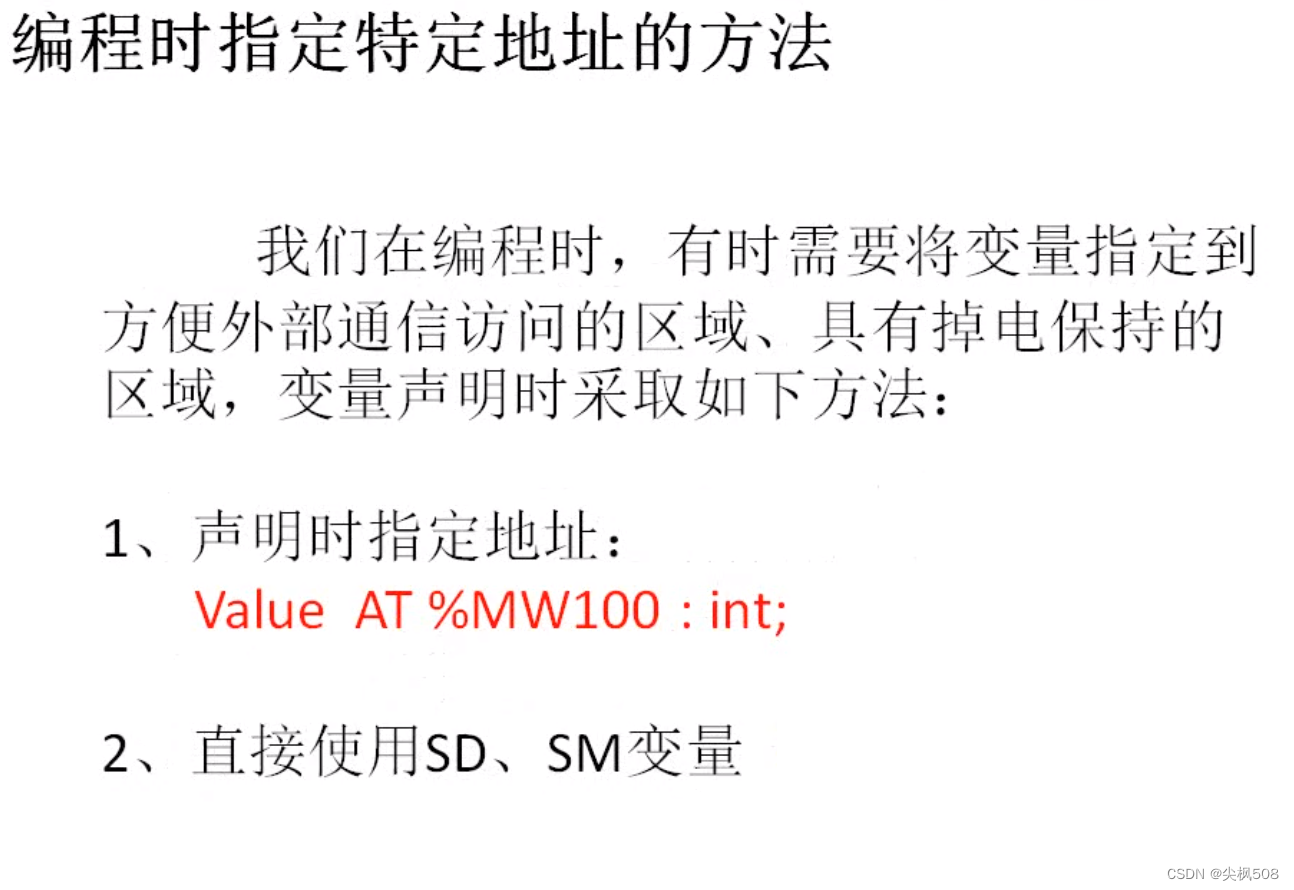
2. AM600内存的编址规则
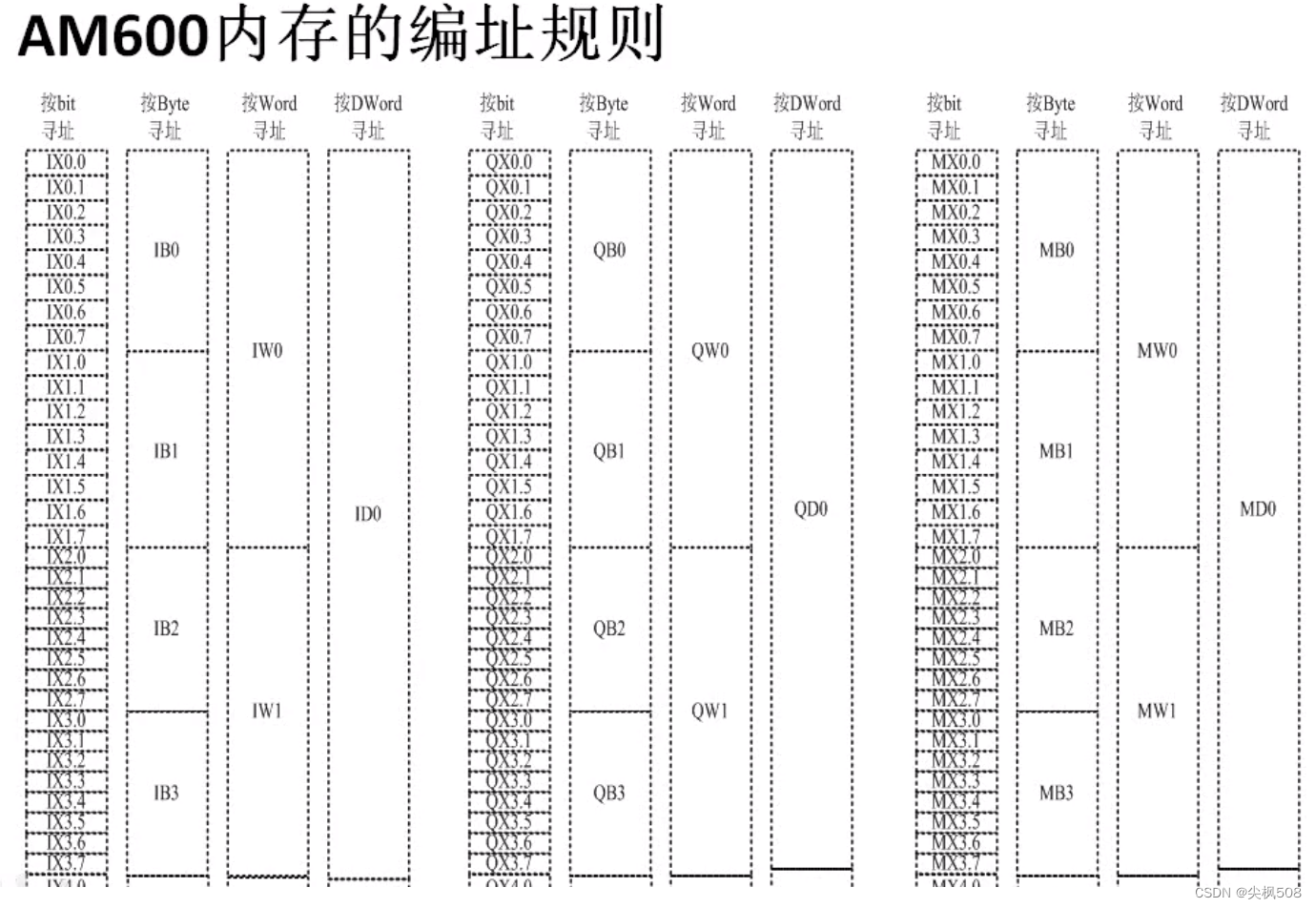
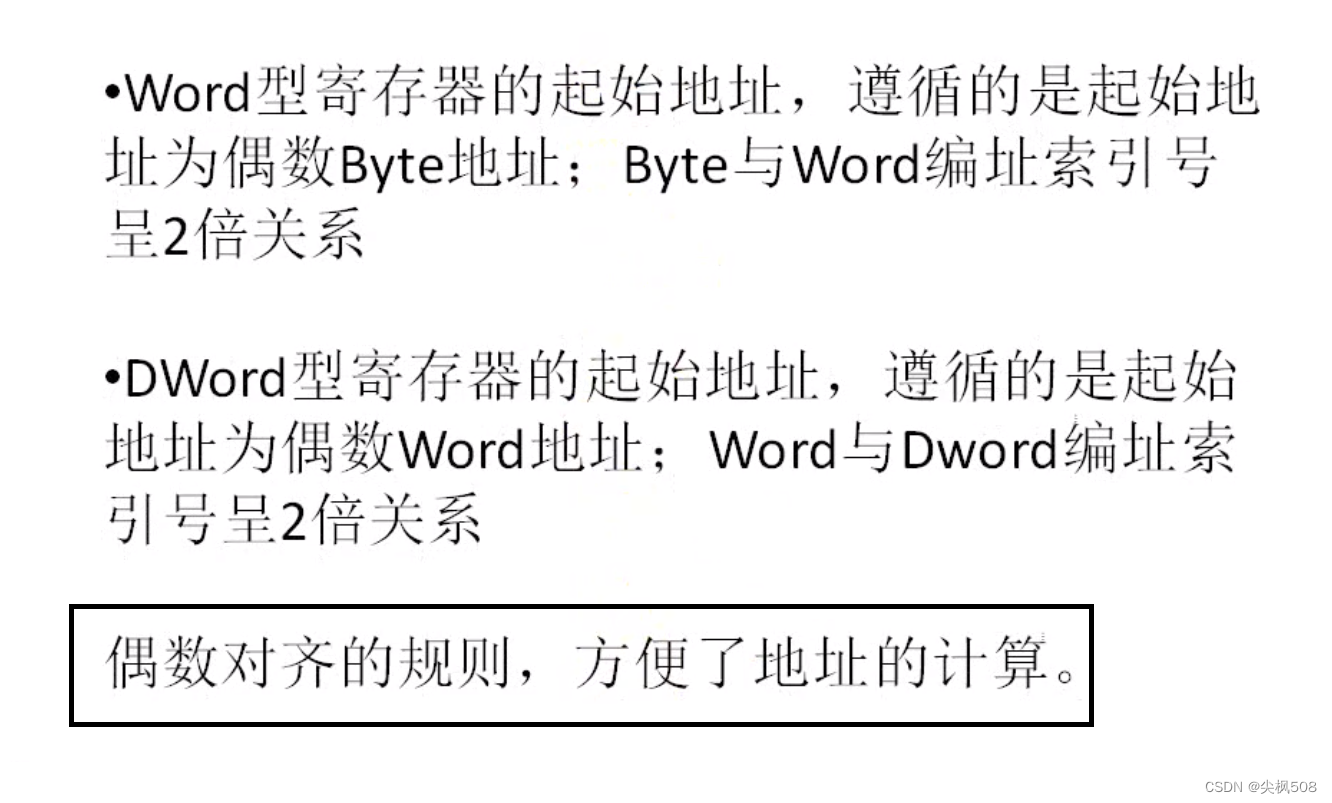
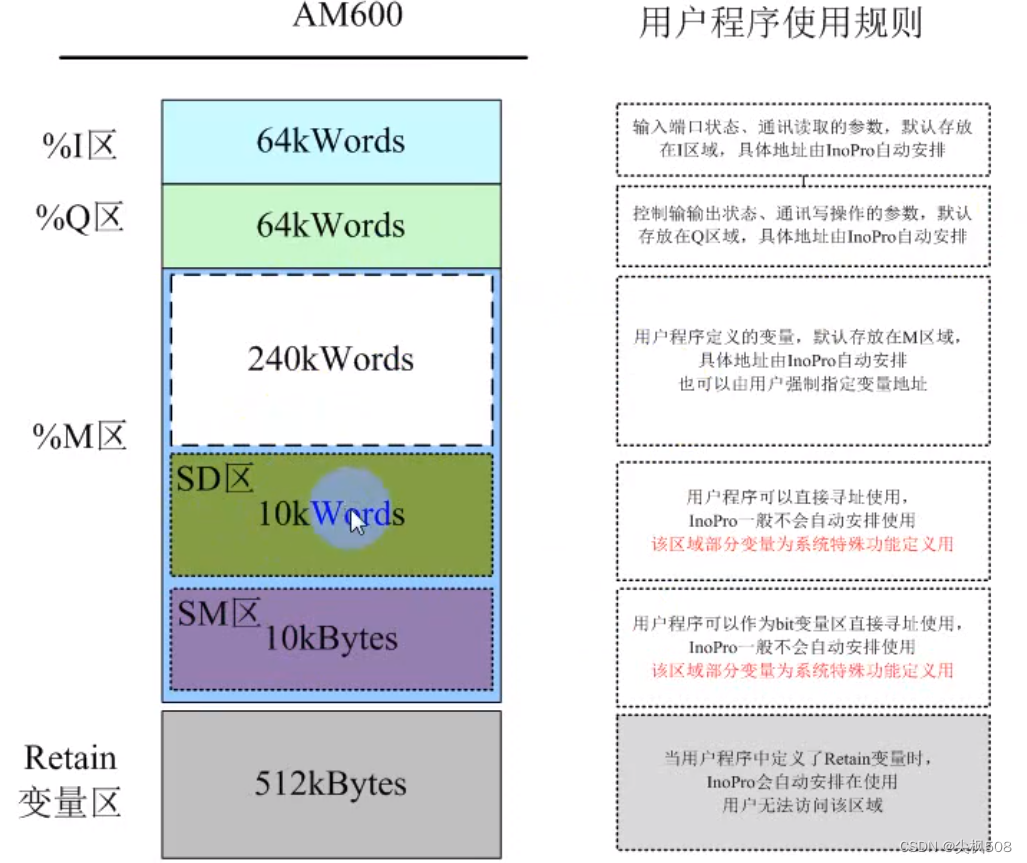
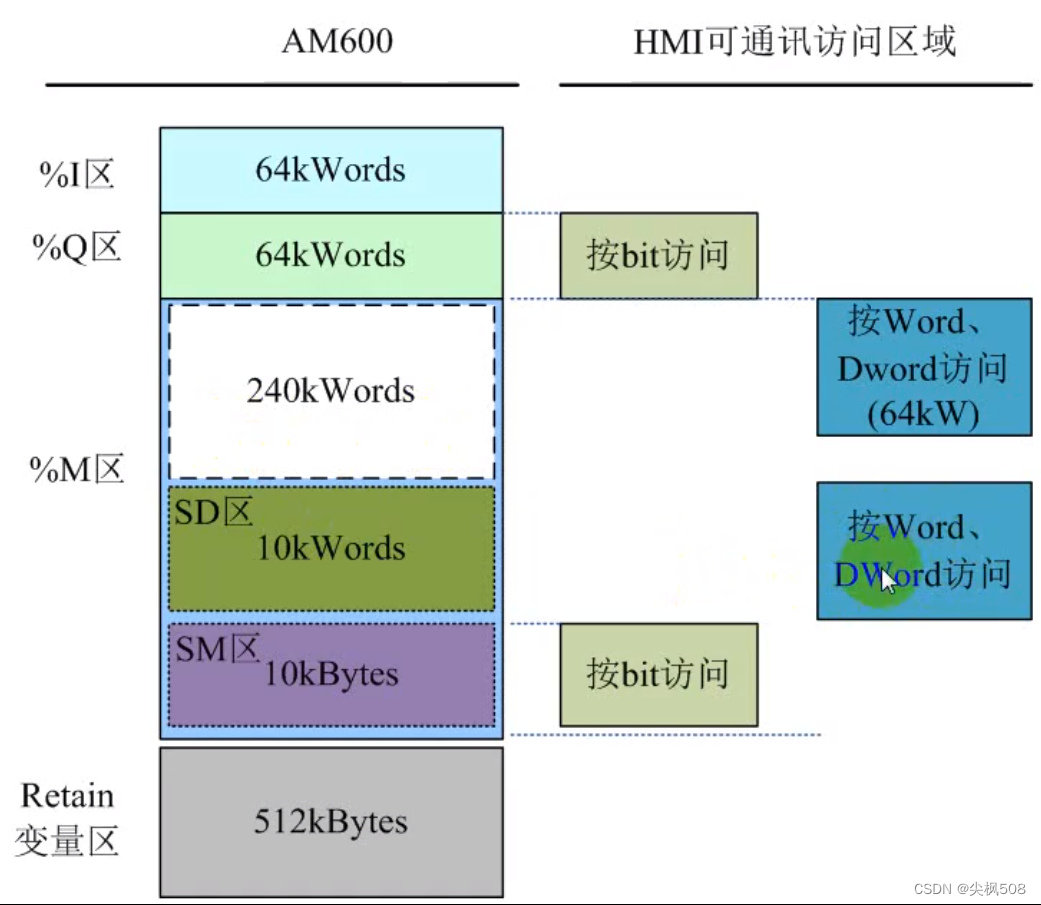
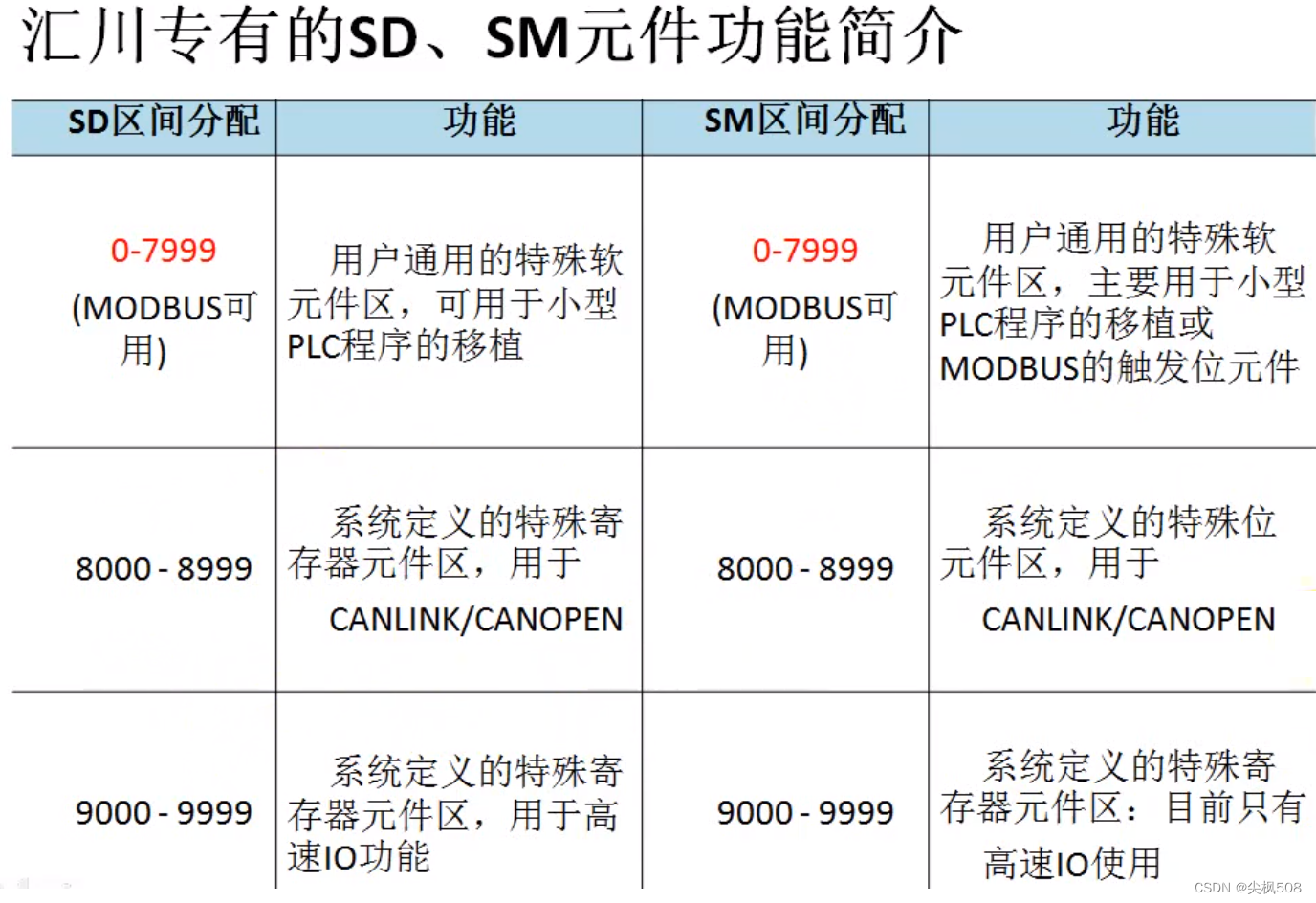
3. AM600内存的使用特点

4. 编程时指定特定地址的方法