天啊!你们听说了吗?数据互联互通问题终于迎来了突破性进展!作为生产管理系统的关键部分,数据互联互通一直是个大问题。然而,ETHERCAT和TCP/IP是两个不同的协议,它们之间的通讯一直是个大 问题。但是,现在有一款神奇的产品出现了,它叫做远创智控YC-ECT-TCPIP,它可以让EtherCAT网络和 TCP/IP 网络互联互通!

这个产品真的是太棒了!远创智控YC-ECT-TCPIP是一款自主研发的EtherCAT从站功能的通讯网关。它可以连接到EtherCAT总线中做为从站使用,连接到 TCP/IP 网络中做为服务器或客户端使用。这就意味着,现在你可以通过这个神奇的产品,让你的生产管理系统更加高效,让你的数据互联互通变得更加容易!无论是从站还是客户端,这个产品都可以帮你搞定!
不要犹豫,现在就试试远创智控YC-ECT-TCPIP吧!它将会给你带来意想不到的惊喜!如果你已经使用过这个产品,那就赶紧在评论区里分享一下你的使用感受吧!如果你还没有使用过,那就点赞这个视频,让更多人看到这个神奇的产品吧!
设置网关的 TCP/IP 网口
2, 将电脑用网线连接至网关的 P3 网口上。
3, 打开 TCPConf8 软件后,点击“连接”,可以与网关建立 TCP 连接,进而修改 TCP/IP 接口的 IP、端口号等参数。

注意“目标地址”是网关的 TCP/IP 接口 IP 地址,出厂默认 IP 地址是 “192.168.1.200”。如果需要修改 TCP/IP 的 IP 地址,首先要用电脑与网关建立连接,然后点击图中的“修改 IP 参数”即可。
4, 网关的 TCP/IP 接口最大支持建立 8 个连接,在下图中分别对应“设备端口 1”~“设备端口 8”。

5, 远端端口:指的是对端TCP/IP 设备的端口号。远端IP:指的是对端TCP/IP 设备的IP 地址。
6, 用户对使用的端口完成修改后,要点击“确认当前配置”,使网关的 TCP/IP接口保存配置并复位。
5.2 配置网关EtherCAT输入输出长度
7, 使用网线将电脑与网关EtherCAT接口连接。
8, 将拨码的第 8 位拨到 ON,此时网关处于配置状态,然后给网关供电。
9, 网关处于配置状态时,此时网口使用 192.168.1.201 的 IP 地址,应使电脑的 IP 网段设置于 192.168.1.xxx 。
10, 打开 GW Modbus Builder 软件,首先设置软件使用的 IP 地址,点击菜单栏“设置— —通讯设置——以太网设置”,如下图,电脑的 IP 是 192.168.1.111。(设备 IP 地址和配置模块地址不需要设置)

11, 点击菜单栏“工具——在线”,在弹出的窗口中,选择“EtherCAT配置”。

12, 点击“连接从站”按钮,连接成功后其他按钮会变成可以点击的状态:

13, 填写用户需要的输入、输出数据长度,注意数据长度是累加的,点击
“写入配置”按钮:

14, 写入成功后,会弹出 OK 的对话框。

15, 设置完毕后,网关拨码的第 8 位拨到 OFF,然后重新给网关供电。
5.2 配置网关的EtherCAT从站
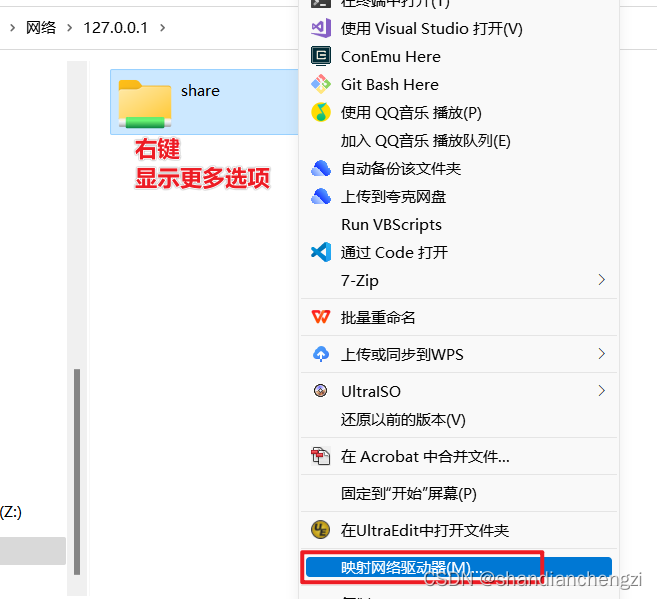
16, 将网关 xml 文件拷贝到主站相应路径下:

17, 新建项目

18, 新建工程后,在下图中 Device 的位置,点击鼠标右键 Add New Item,添加EtherCAT主站。

19, 在弹出的对话框中,选择EtherCATMaster,然后点击 OK。

20, 选择电脑对应的网卡,点击 OK。

21, 主站建立后,有 2 种方式添加从站:
a. 在下图中主站 Device 1 的位置,点击鼠标右键 Scan 可以将网关扫描上来。
b. 在下图中主站 Device 1 的位置,点击鼠标右键 Add New Item,添加
ETHERCAT从站,如下图所示。

22, 在弹出的对话框中,选择网关设备,点击 OK。
c. 添加后的从站,如下图所示的 Box 1。点击左侧项目树中的 Box 1,在
23, 右侧的主视图中,点击 Slots,可以看到网关配置输入输出数据的页面。 24, 如下图所示,在 Slot 列表中,一共可以添加 16 条配置信息。右侧 Module 列表的每一条配置选项,都可以添加到 Slot 中。按照下图 1、2、3 的操作顺序,可以将 Module 添加到 Slot 中。

25, 注意:此处输入、输出长度的配置,要与网关的配置一致。
5.3 启动网关运行
5.3.1 网关的控制字
26, 网关在ETHERCAT一端配置数据长度时,网关内部占用 3个 字的输出,用于对网关 TCP/IP 一侧通讯的控制。
Word1:发送数据长度,以字节为单位。Word2:通讯控制字,如下表所示:
Word3:定时发送间隔。
Bit15~Bit8 Bit7 Bit6 Bit5~Bit4 Bit3 Bit2 Bit1 Bit0
无 强制接收完毕 强制发送完毕 无 快速应答模式 全双工
模式 发送方式 启动发送
● D1: auto_txd 发送方式
auto_txd=0:触发发送模式
auto_txd=1:自动定时发送模式
● D0: start_tr 启动发送标记
27, 当 auto_txd=0 时是触发模式,此时仅当 start_tr 由 0 变 1(上升沿)时,触发一次发送。
28, 当 auto_txd=1 时是自动发送模式,此时仅当 start_tr= 1 时,网关按照“定时发送间隔”,自动连续发送。
29, 所谓“发送一次”,即启动网关接口发送进程,按照“发送数据长度”中的设置,将
PROFINET 输出数据区中数据做为网关发送报文,发送到现场设备。
D1:auto_txd D0: start_tr 发送方式 总线桥操作
0 0→1 触发模式 完成一次发送
0 其他 触发模式 不发送
1 1 自动模式 按照“定时发送间隔”,自动连续发送
1 0 自动模式 不发送
● D2:全双工模式:是网关和对端设备各自按自己的需要发送数据,互不影响。
● D3: 快速应答模式
● D7:强置接收完毕/发送允许状态 set_tr
● D6:强置等待接收状态 set_re
D7 D6 功能
1 0 “强置接收完毕/发送允许状态 set_tr”: 强置 reok_tren=1, 使网关处于”接收完毕/允许发送”状态
0 1 “强置等待接受状态set_re”: 强置reok_tren=0, 使网关处于”等待接收”状态
0 0 无作用
1 1 无作用
5.3.2 网关的状态字
30, 网关在EtherCAT一端配置数据长度时,网关内部占用 3个 字的输入,用于显示网关 TCP/IP 一侧通讯的状态。
Word1:接收数据长度,以字节为单位。Word2:通讯状态字,如下表所示:
Word3:接收计数器,网关每接收到一次新的数据包,计数器加1。
Bit15~Bit7 Bit6~Bit4 Bit2 Bit1 Bit0
无 无 正在接收 正在发送 接收完毕/发送允许
● D0:reok_tren “接收完毕/发送允许”
reok_tren=1:网关接口处在“接收完毕/发送允许”状态; reok_tren=0:网关接口处在“等待接收”状态;
● D1:tr_ing “正在发送报文标记” tr_ing=1:网关接口正在发送数据中tr_ing=0:网关接口不在发送数据中;
● D2:re_ing “正在接收报文标记” re_ing=1:网关接口正在接收数据中; re_ing=0:网关接口不在接收数据中;
D2 D1 D0 状态
0 0 1 网关处在“接收完毕/发送允许”状态,如果”启动发送标记 start_tr”由 0 变 1,则网关转入 D2D1D0=010,即启动发送,将PROFINET 输出数据区中的数据发送至 RS232 设备。
0 1 0 网关正在向 RS232 设备发送报文数据。
0 0 0 网关处在“等待接收“报文状态,即等待接收 RS232 设备发送的数据报文。
1 0 0 网关正在接收 RS232 设备发送的报文数据。
5.3.3 启动网关的 TCP/IP 客户端
31, 网关的拨码第 1 位拨到 ON,表示网关做为 TCP/IP 客户端运行。
32, 运行EtherCAT主站软件,使用定时发送方式,如下图发送数据长度写“0x0600”,控制字写“0x0003”,定时发送间隔写“0x5000”,表示按定时发送方式运行,每80ms发送一次6字节的数据包,也可以按照触发方式发出数据,当每次控制字由“0x0000”变为“0x0001”的时候,数据发出一次。

5.3.4 启动网关的 TCP/IP 服务器
33, 网关的拨码第 1 位拨到 OFF,表示网关做为 TCP/IP 服务器运行。
34, 运行ETHERCAT主站软件,网关每次收到新的数据包,会将“接收计数器”加 1,方便用户判断是否有新的数据。在接收到数据之后,如果需要网关回复数据,可以将控制字由“0x0000”变为“0x0001”,数据发出一次。

5.3.5 启动网关的全双工模式
全双工模式:是网关和对端设备各自按自己的需要发送数据,互不影响。
35, 网关的拨码第 1 位拨到 ON,表示网关做为 TCP/IP 客户端运行。
36, 运行ETHERCAT主站软件,可以使用全双工模式定时发送,如下图发送数据长度写“0x0600”,控制字写“0x0007”,定时发送间隔写“0x5000”,表示按全37, 双工模式定时发送,每80ms发送一次6字节的数据包,也可以按照全双工模式下的触发方式发出数据,当每次控制字由“0x0004”变为“0x0005”的时候,数据发出一次。