ROS学习笔记(实践三)--常见相机问题整理

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/15135.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

【动手学习深度学习--逐行代码解析合集】11实战Kaggle比赛:预测房价
【动手学习深度学习】逐行代码解析合集
11实战Kaggle比赛:预测房价 视频链接:动手学习深度学习–实战Kaggle比赛:预测房价 课程主页:https://courses.d2l.ai/zh-v2/ 教材:https://zh-v2.d2l.ai/ 1、下载和缓存数据集 …

基于stm32单片机的智能门禁系统设计
一.硬件方案
基于stm32单片机的智能门禁系统设计的整体电路主要由采用STM32F103单片机,4*4矩阵按键电路,电子锁继电器驱动电路,开锁LED指示灯,LCD1602显示屏电路,蜂鸣器报警电路,RFID感应电路,…
附录7-用户列表案例,element-ui
目录
1 效果
1.1 查询所有用户
1.2 添加新用户
1.3 删除用户
1.4 用户详情
2 后端
2.1 查询所有
2.2 添加
2.3 删除
2.4 查询单个
3 前端
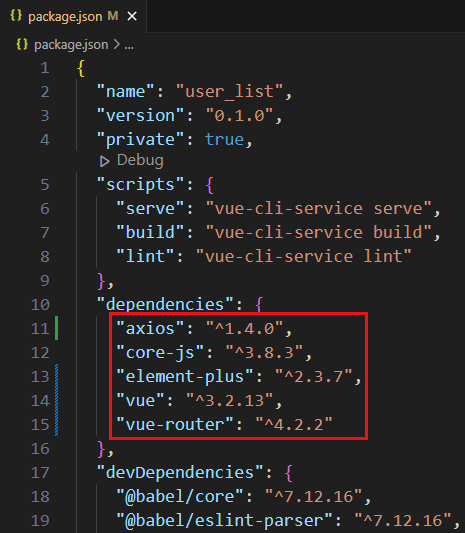
3.1 环境
3.2 main.js
3.3 userList.vue
3.4 userInfo.vue 1 效果
1.1 查询所有用户 1.2 添加新用户 …
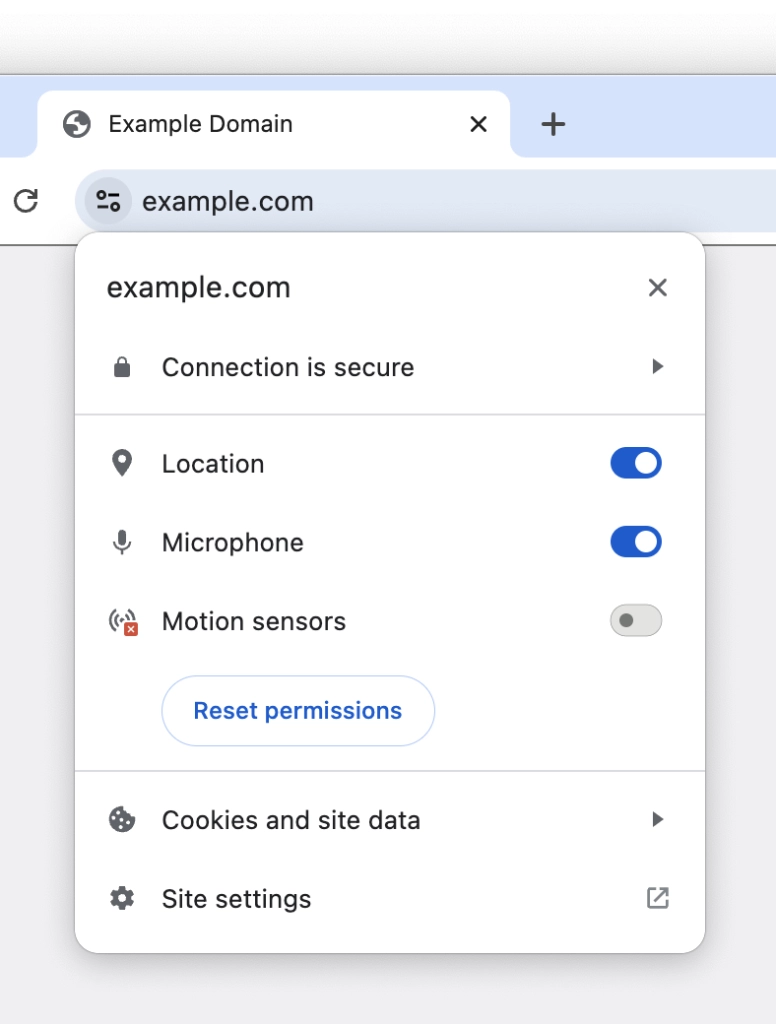
Chrome将更换HTTPS的“小绿锁”图标
HTTPS 是一种用于安全地传输数据的网络协议。HTTPS 是在 HTTP 协议的基础上添加了 SSL/TLS 协议,通过对数据进行加密,从而保证数据传输的安全性。HTTPS 常用于保护敏感信息,如个人身份信息、银行账户信息、信用卡信息等。 目前市面上所有的浏…
适合Docker的场景以及不适合的场景
文章来自:When to use and when not to use Docker和7 Cases When You Should Not Use Docker,以及互联网网上的一些零散内容。这篇文章只是基于我自己的理解,进行简单的概述。
适合的场景 你的团队不是一成不变的。 当有新的成员加入&#…

Openlayers实战:回显多点、多线段、多多边形
Openlayers地图中,回显数据是非常重要的。 继上一示例回显点、线、圆形、多边形后。本示例回显多线,多点,多个多边形。用到了MultiPoint,MultiLineString,MultiPolygon。 多个信息的显示可以采用循环的方式,单个显示点、线、面。 但是循环方式是要多次计算的,而MultiPoint…

FreeRTOS ~(六)信号量 ~ (1/3)信号量解决同步缺陷
前情提要 FreeRTOS ~(四)同步互斥与通信 ~ (1/3)同步的缺陷 FreeRTOS ~(五)队列的常规使用 ~ (1/5)队列解决同步缺陷 举例子说明:利用信号量解决前述的"同步的缺陷&…

【数据仓库】FineBI数据可视化使用体验
FineBI介绍 FineBI是新一代自助式BI工具,企业客户多,服务范围广.凭借finebi简单流畅的操作,强劲的大数据性能和自助式的分析体验。 1,对个人用户来说,免费的无限期试用,解锁所有功能,除了限制两个并发访问,个人用户可以…
CSS 两行文字两端对齐与字符间距的处理
前言
👏CSS 文字对齐与字符间距的处理,在这里,你可以了解到文字渐变,letter-spacing,text-align,text-align-last,filter等,速速来Get吧~ 🥇文末分享源代码。记得点赞关…
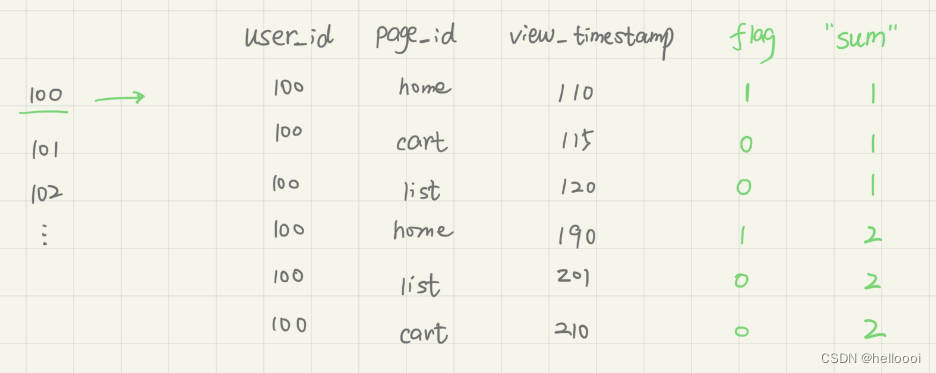
42. 会话划分问题
文章目录 题目需求思路一实现一题目来源 题目需求
现有页面浏览记录表(page_view_events)如下,每行数据代表:每个用户的每次页面访问记录。
规定若同一用户的相邻两次访问记录时间间隔小于60s,则认为两次浏览记录属于…