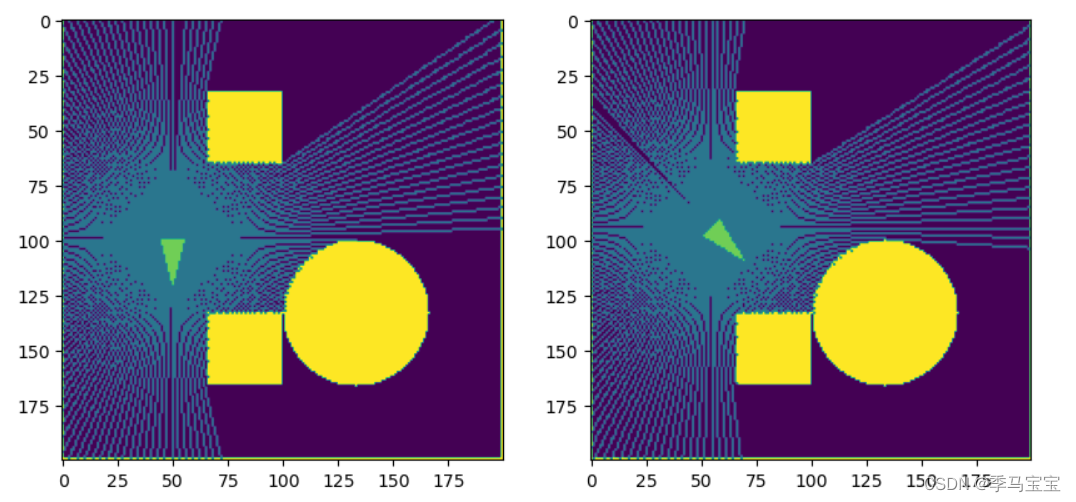
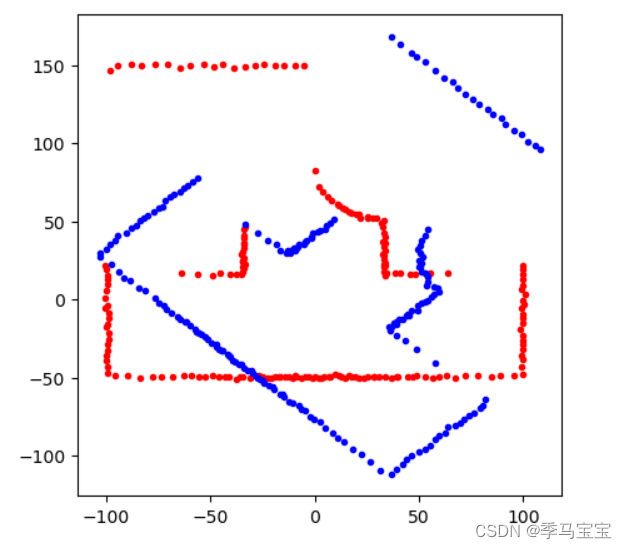
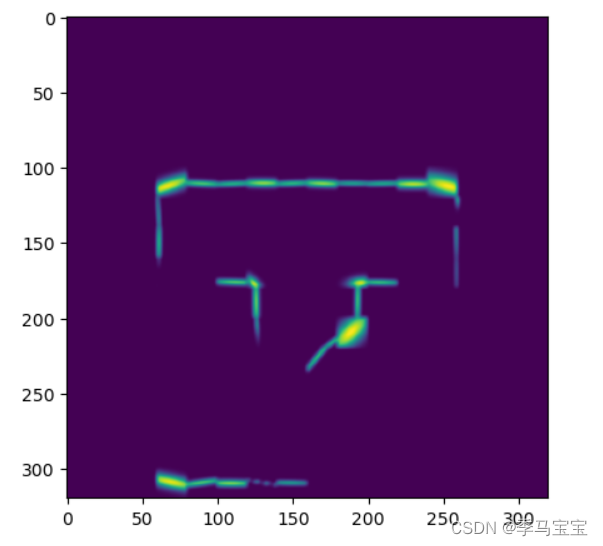
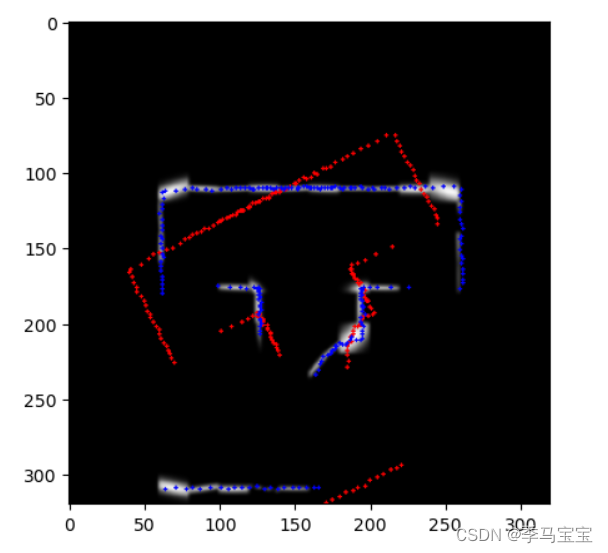
python实现正态分布变换NDT算法(notebook版本)
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/29580.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
标注工具Labelimg,正常运行显示,但是对图片点击Create RectBox画矩形框开始闪退
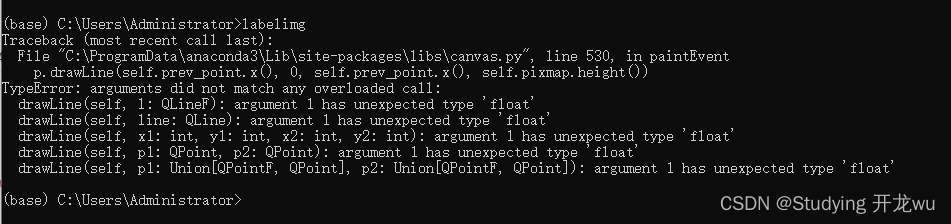
问题描述*:标注工具Labelimg,正常运行显示,但是对图片点击Create RectBox画矩形框开始闪退,闪退出现以下代码
File “C:\ProgramData\anaconda3\Lib\site-packages\libs\canvas.py”, line 530, in paintEvent p.drawLine(self.p…
图采样、随机游走、subgraph的实现
诸神缄默不语-个人CSDN博文目录
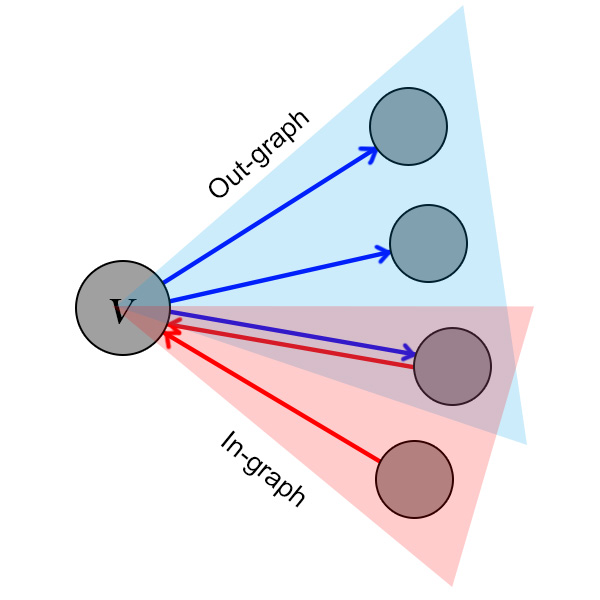
本博文主要关注如何用代码实现图采样、随机游走、subgraph(为什么这些东西放在一起写,我感觉还蛮直觉的)。 随机游走和subgraph我之前都写过不少博文了,可以参考↑ 这个主要是我前年还在干GNN时候…
Hugging Face开源库accelerate详解
官网:https://huggingface.co/docs/accelerate/package_reference/accelerator
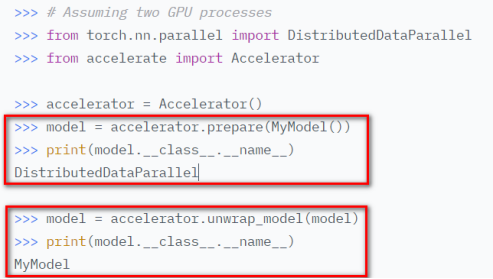
Accelerate使用步骤
初始化accelerate对象accelerator Accelerator()调用prepare方法对model、dataloader、optimizer、lr_schedluer进行预处理删除掉代码中关于gpu的操作࿰…
Windows11 C盘瘦身
1.符号链接
将大文件夹移动到其他盘,创建成符号链接 2.修改Android Studio路径设置
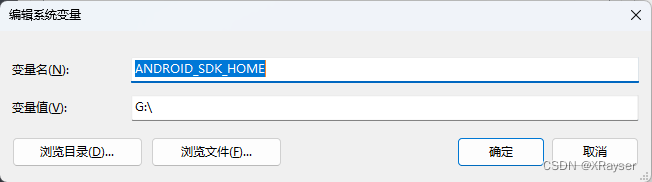
1.SDK路径 2.Gradle路径 3.模拟器路径
设置环境变量 ANDROID_SDK_HOME


每日一题2023.7.19|ACM模式
文章目录 C的输入方式介绍cin>>cin.get(字符变量名)cin.get(数组名,接收字符数目)cin.get()cin.getline() getline()gets()getchar() AB问题|AB问题||AB问题|||ABⅣAB问题ⅤAB问题Ⅵ C的输入方式介绍
参考博客
cin>> 最基本,最常用的字符或者数字的输…
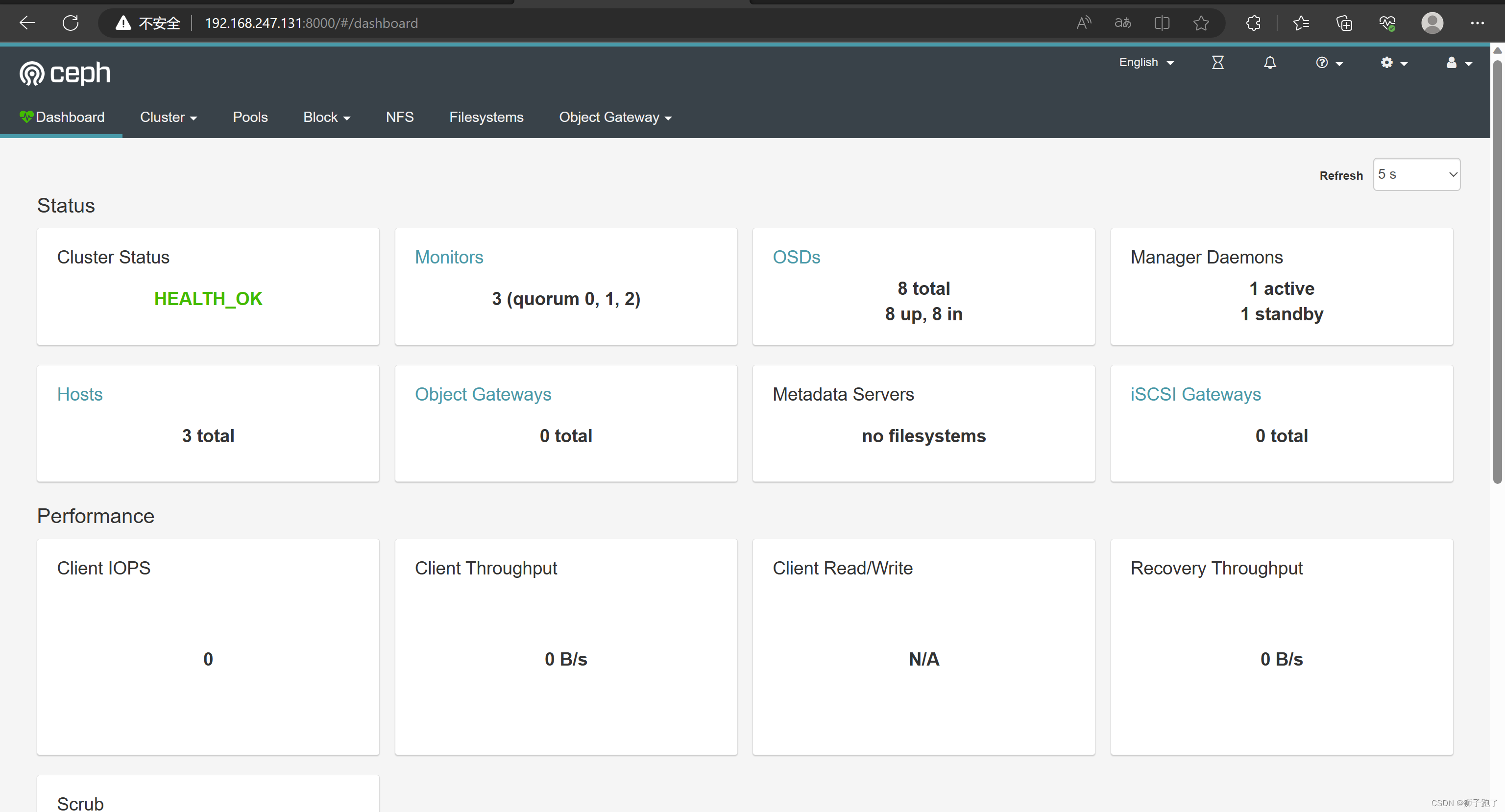
Ceph 分布式存储之部署
一.Ceph 存储基础
1、单机存储设备 DAS(直接附加存储,是直接接到计算机的主板总线上去的存储) IDE、SATA、SCSI、SAS、USB 接口的磁盘 所谓接口就是一种存储设备驱动下的磁盘设备,提供块级别的存储 NAS(网络附加存储…

ES系列--文档处理
一、文档冲突 当我们使用 index API 更新文档 ,可以一次性读取原始文档,做我们的修改,然后重 新索引 整个文档 。 最近的索引请求将获胜:无论最后哪一个文档被索引,都将被唯一存 储在 Elasticsearch 中。如果其他人同时…
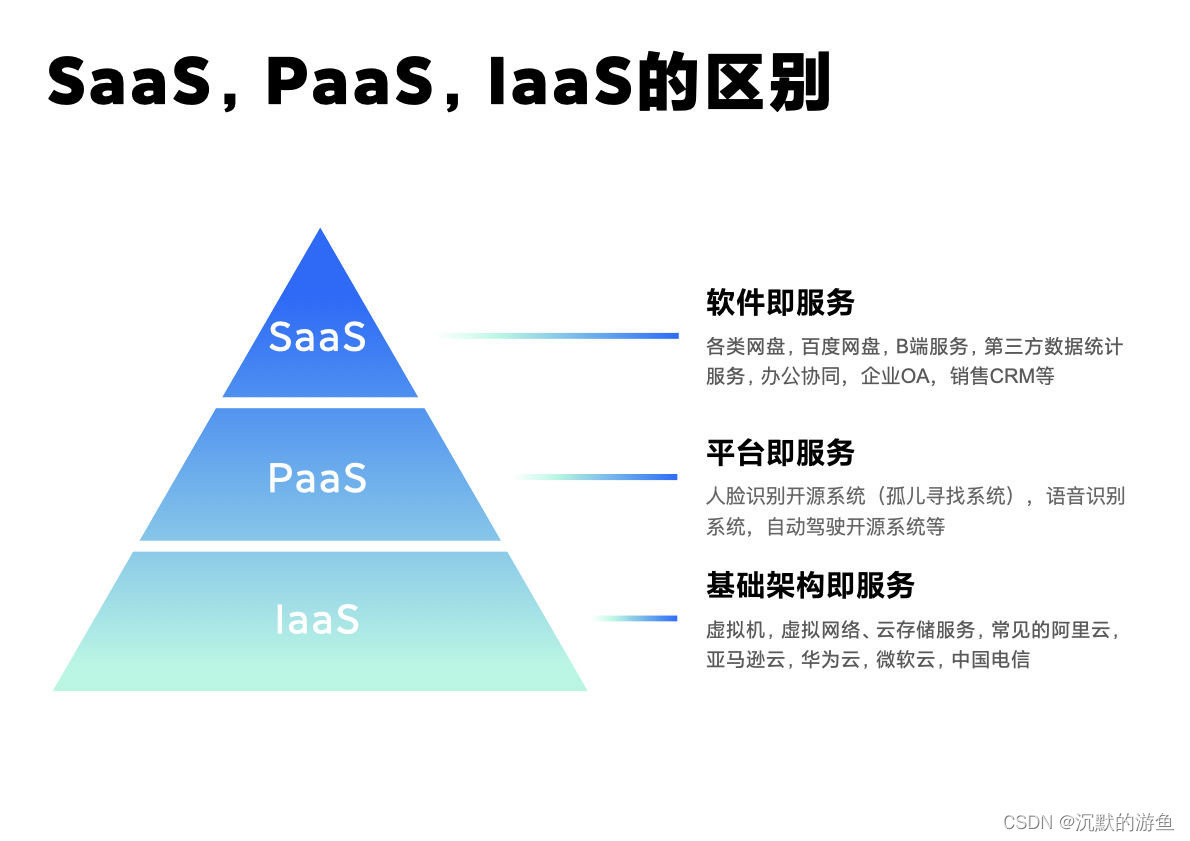
云计算名词-IaaS,PaaS,SaaS
在学习分布式的过程中,知道了PaaS这个词儿,但是不知道是什么意思。从网上查询了之后,做了简单的了解。这里简单记录一下,方面之后的查阅。
IAAS(Infrastructure-as-a-Service)基础设施即服务 网上的定义是…
13matlab数据分析多项式的求值(matlab程序)
1.简述 统计分析常用函数 求最大值 max 和 sum 积 prod 平均值:mean 累加和:cumsum 标准差:std 方差:var 相关系数:corrcoef 排序:sort
四则运算 1.多项式的加减运算就是所对应的系数向量的加减运算&#…
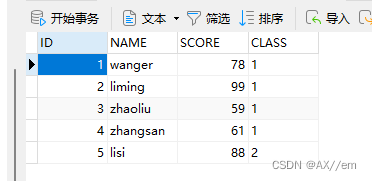
Oracle 的视图
Oracle 的视图
源数据:
-- Create table
create table STU_INFO
(id NUMBER not null,name VARCHAR2(8),score NUMBER(4,1),class VARCHAR2(2)
)
tablespace STUDENTpctfree 10initrans 1maxtrans 255storage(initial 64Knext 1Mminextents 1maxextents unlim…

【4】Vite+Vue3左右容器中相同属性的元素内容自动对齐
在当今前端开发的领域里,快速、高效的项目构建工具以及使用最新技术栈是非常关键的。ViteVue3 组合为一体的项目实战示例专栏将带领你深入了解和掌握这一最新的前端开发工具和框架。
作为下一代前端构建工具,Vite 在开发中的启动速度和热重载方面具有突…