高精度AGV小车N/S极磁条导航传感器CNS-MGS-080N主要运用于自主导航机器人、室内室外巡检机器人、自主导航运输车AGV(AGC)、自动手推车等自主导航设备,完成自主导航设备的预设运行路线检测及定位。基于预设磁轨迹的导航方式是自主移动平台如AGV、巡检机器人、无轨货架等自主导航设备的一种导航方式。
本文重点介绍高精度AGV小车N/S极磁条导航传感器CNS-MGS-080N参数配置操作方法。

一、准备工作
1、线缆准备

2、RS232 连线-直接出现版本

1) 上位机 RX 和 TX 与传感器需要交叉连接;
2) 传感器 GND 内部与电源负极共线;
3、RS232 连线-连接器出线版本

1) 上位机 RX 和 TX 与传感器需要交叉连接;
2) 传感器 GND 内部与电源负极共线;
3) 按先通电再接连接 RS232;
二、通讯规格
| 通信方式 | 点对点 |
| 通信速率 | 115200bps |
| 数据位 | 8位 |
| 校验位 | 无校验 |
| 停止位 | 1位 |
三、连接配置软件
1、获取软件
咨询销售和技术支持人员获取
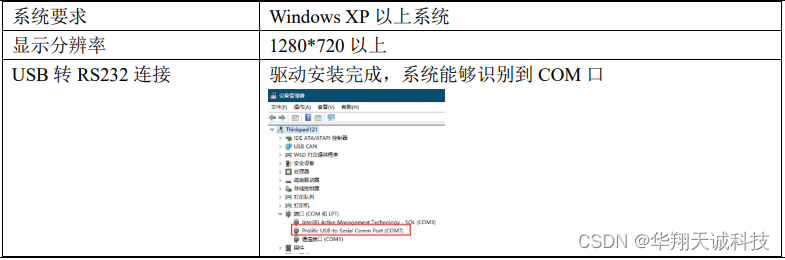
2、软件运行环境
3、软件解压

4、运行配置软件

选择对应型号

单击打开 CNS-MGS-080N/D 配置软件
四、配置操作
1、确认型号配置软件型号是否与传感器相匹配
2、串口选择
1) 选择对应 RS232 串口线对应的 COM 端口;
2) 按照默认串口参数连接;
3) 如果有更改过 RS232 串口通信波特率为 19200bps 情况下,则需要将波特率为 19200bps。

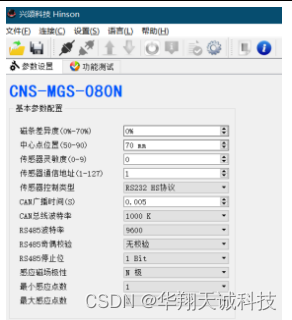
3、连接进入设置参数界面



| 参数名称 | 参数 | 默认参数 |
| 磁条差异度 | 0-70% | 0% |
| 中心点位置 | 65-105mm | 70mm |
| 传感器灵敏度 | 0-9 | 9 |
| 传感器通信地址 | 参数范围1 ~ 127 | 127 |
| 传感器控制类型 | RS232-HS协议 RS485-HS 协议 RS485-MODBUS 协议 CAN-HS协议 CAN OPEN协议 | CAN OPEN协议 |
| CAN广播时间 | 0-0.5s,(0:不广播) | 0.005s |
| CAN总线波特率 | 125 Kbps,250 Kbps, 500 Kbps,1000 Kbps | 1000Kbps |
| RS485波特率 | 9600bps,19200bps, 38400bps,57600bps, 115200bps | 115200bps |
| RS485奇偶校验 | 无校验,奇校验,偶校验 | 无校验 |
| RS485停止位 | 1Bit,1.5Bit,2Bit | 1bit |
| 感应磁场极性 | N极,S极,N S极 | N极 |
| 最小感应点数 | 1-3 | 1 |
| 最大感应点数 | 5-8 | 5 |
3.1、 磁条区分度
用于区分相邻磁条磁场信号相似度, 设置为 0 时候,区分两根磁条必须有一个点信号小于设定灵敏值,才能够区分出两 根磁条。 设置为 1-70 时候,相邻磁点检测到磁场强度信号相似度大于设定值时。区分出两根磁条。

3.2、中心点位置
中心点位置 L,传感器检测磁条的位置 L1 的值是根据中心点位置来计算。默认为 70mm;

在与下列型号的驱动器搭配使用时候必须要设置在 70mm CNS-BLD-2S-NC,CNS-BLD-2L-NC,CNS-MI50HDN,CNS-MI50HSN,CNS-STDR-2L-NC, CNS-STDR-2M-NC
3.3、 灵敏度调节
传感器检测最小强度阈值设定,大于设定阈值磁场强度信号为有效。小于设定 阈值强度则忽略。 强度值与灵敏度对应关系。
| 灵敏度 | 磁场强度值 |
| 0 | >500 |
| 1 | >450 |
| 2 | >400 |
| 3 | >350 |
| 4 | >300 |
| 5 | >280 |
| 6 | >260 |
| 7 | >240 |
| 8 | >220 |
| 9 | >200 |
3.4、CAN 总线通信地址
设置 CAN BUS 通信地址; 在 CAN-HS 协议工作模式下时,为节点地址; 在 CAN OPEN 协议工作模式下时,为 CAN OPEN 节点的 Note -ID;
3.5、 CAN 广播时间
CAN-HS 协议模式下,设置传感器自动发送数据的时间间隔; 在与下列型号的驱动器搭配使用时候必须要设置在 0.005s 广播时间 CNS-BLD-2S-NC,CNS-BLD-2L-NC,CNS-MI50HDN,CNS-MI50HSN,CNS-STDR-2L-NC,CNS-STDR-2M-NC
3.6、 通讯方式及协议
设定传感器岔路选择等控制指令接收端口和协议,配置软件通过 RS232 读取参数不 受此限制。
3.7、 CAN 总线通信波特率
设置 CAN BUS 通信波特率,在 AGV 设备等通信距离不长的应用中尽量使用最大 波特率进行通信。
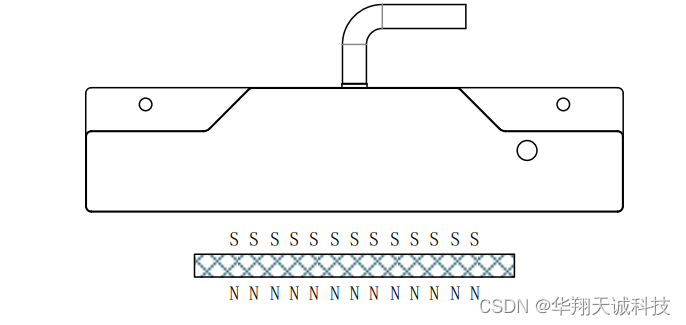
3.8、 感应极性
感应 N 极性磁条
传感器仅检测 N 极磁场信号;

感应 S 极性磁条
传感器仅检测 S 极磁场信号;
在与下列型号的驱动器搭配使用时候必须要设置在 CAN-HS CNS-BLD-2S-NC,CNS-BLD-2L-NC,CNS-MI50HDN,CNS-MI50HSN,CNS-STDR-2L-NC等
注意
在作用磁导航方式下,传感器必须要根据导航磁条设置只感应S极或N极,不能设为感应N,S极。
3.9、 最少感应点数;
此参数含义为只有当多于设定值的磁点检测到的磁场信号后,才检出磁条位置检测。 此项参数主要用于磁场干扰过滤。磁点的磁场强度阈值由灵敏度值来控制。 例如:
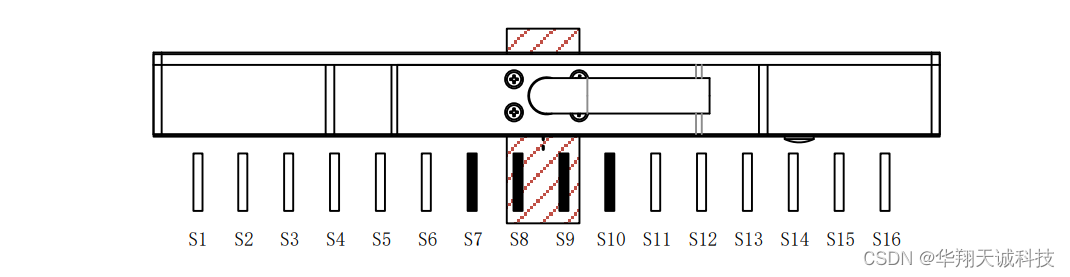
如上图检测状态下,
最小感应点数:设置为 1 或者 2 时候。S8 和 S9 都检测到磁条信号,则使用 S8,S9 位置磁场信号计算磁条位置;
最小感应点数:设置为 3 时候。只有 S8,S9 两个点检测到信号,少于设定值 3,传感器认为未检测到有效磁条信号不输出。
3.10、 最多感应点数;
磁条在规定的 30mm 高度时候,能够感应到的信号点数。
五、参数下载


六、重启生效
更多关于高精度AGV小车N/S极磁条导航传感器CNS-MGS-080N参数配置操作方法,华翔天诚科技欢迎您的咨询与交流!