接上一篇《WSL2部署RV1126 SDK编译环境》
1 编译配置
./build.sh device/rockchip/rv1126_rv1109/aio-rv1126-jd4.mk2 关闭Qt(可选)
vim buildroot/configs/firefly_rv1126_rv1109_defconfig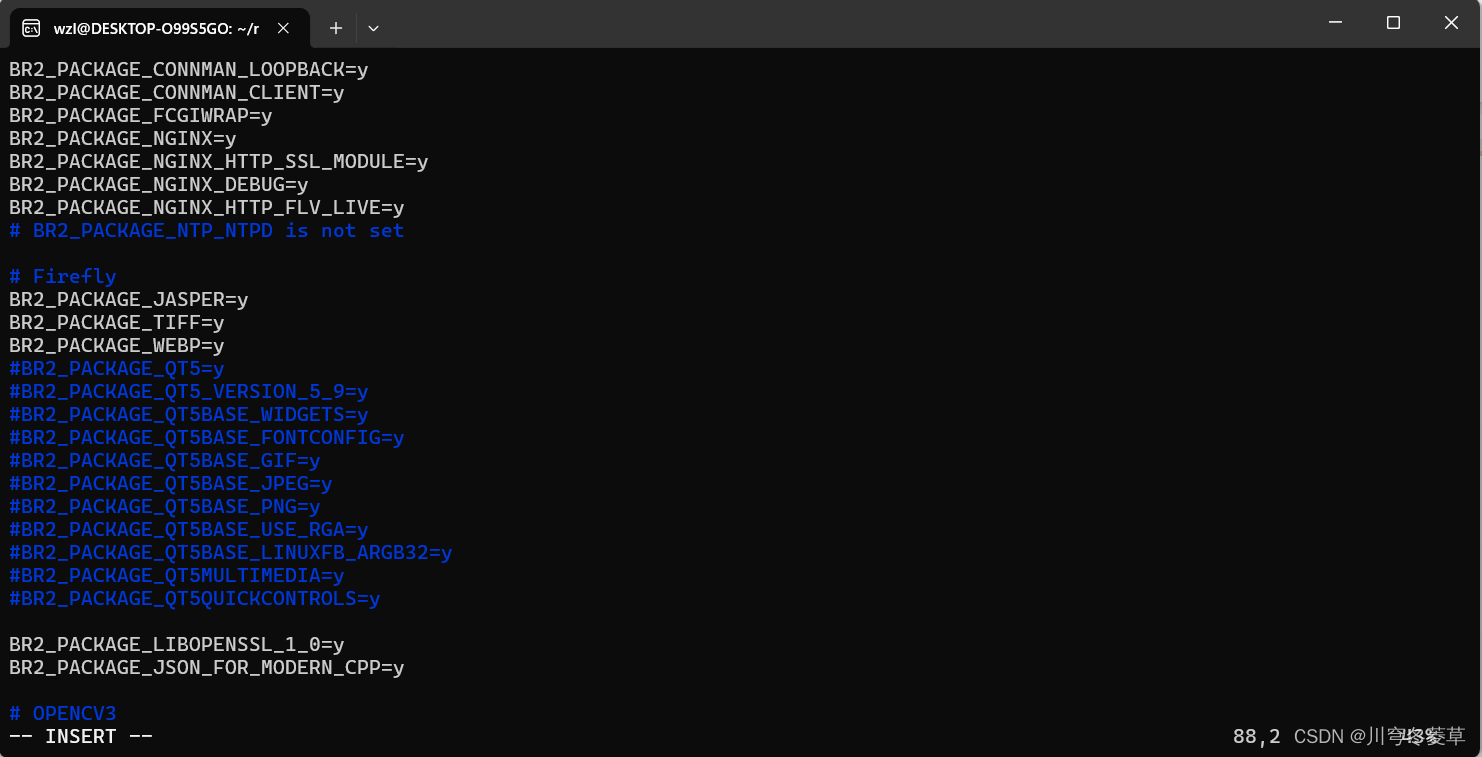
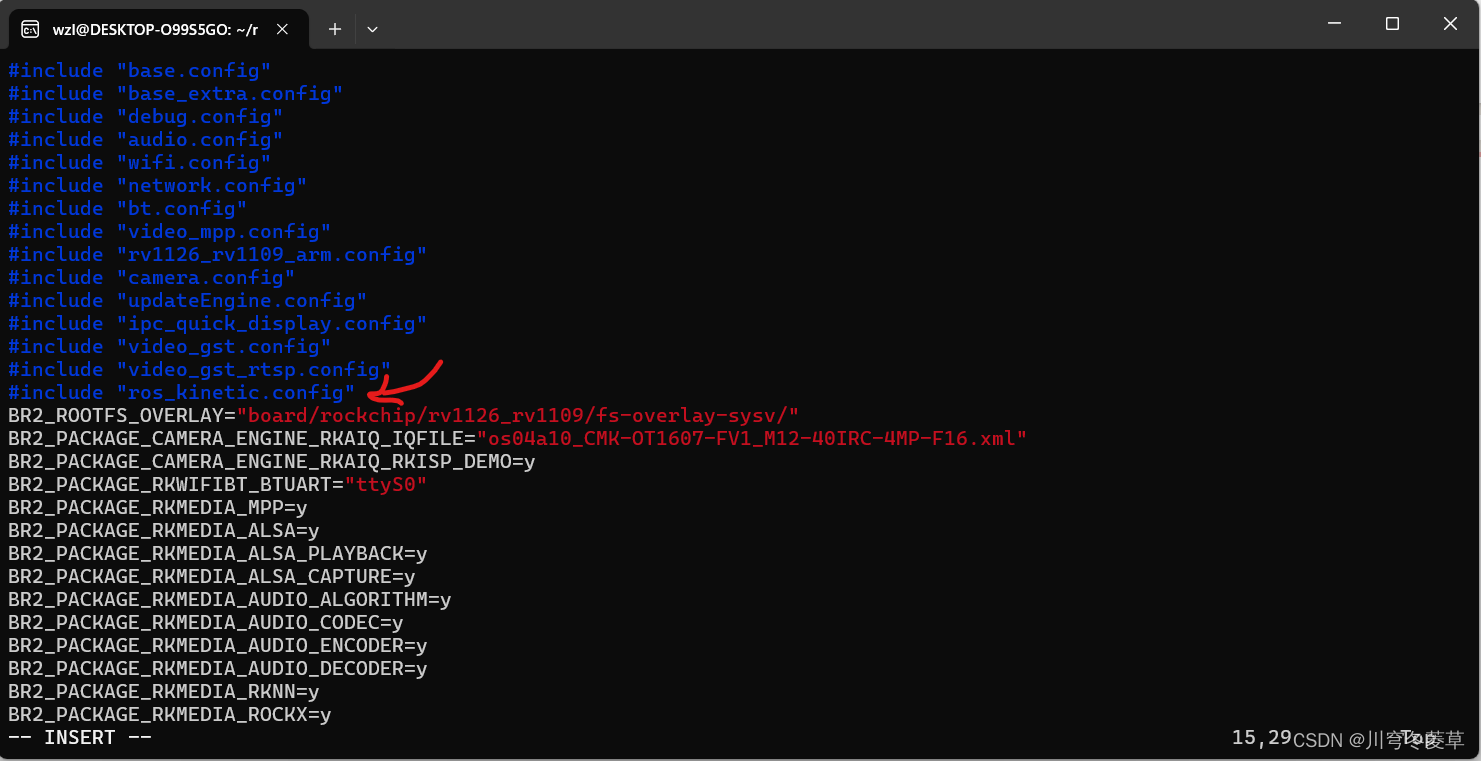
3 启用ROS(可选)
vim buildroot/configs/firefly_rv1126_rv1109_defconfig增加一行#include "ros_kinetic.config"
4 开始编译
./build.sh