欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
本文为深蓝学院《自动驾驶预测与决策规划》 的学习笔记
目录
1 Constant Velocity模型
2 Constant Turn 模型
1 Constant Velocity模型
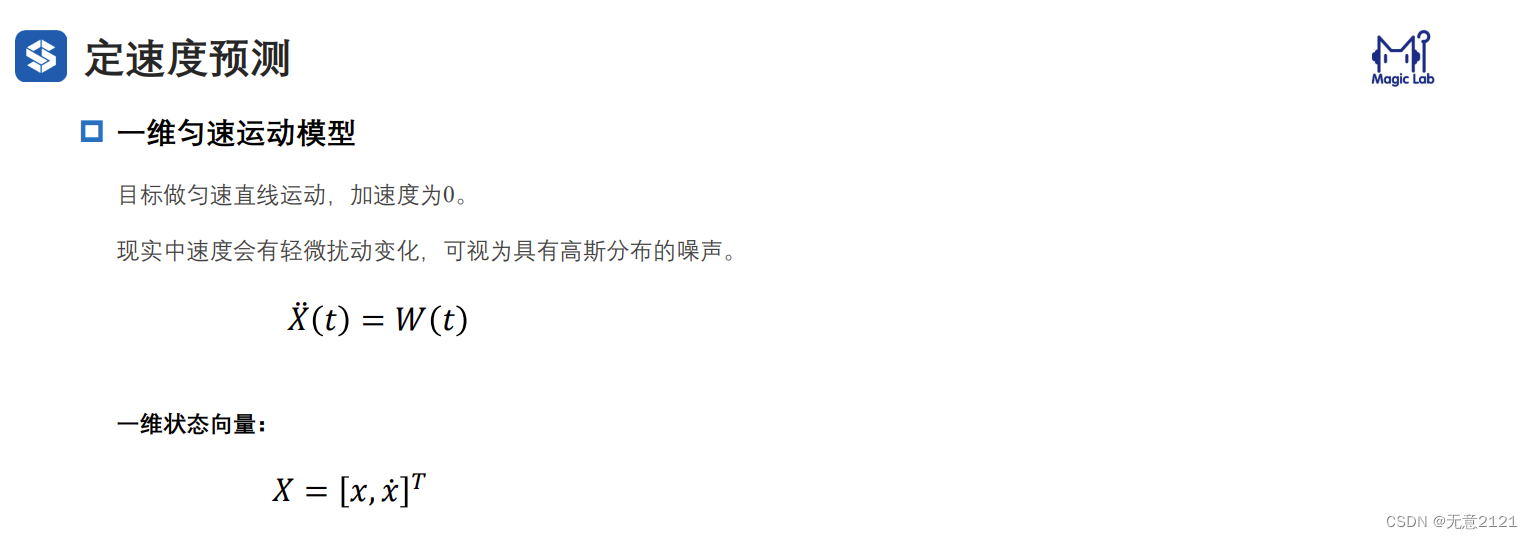
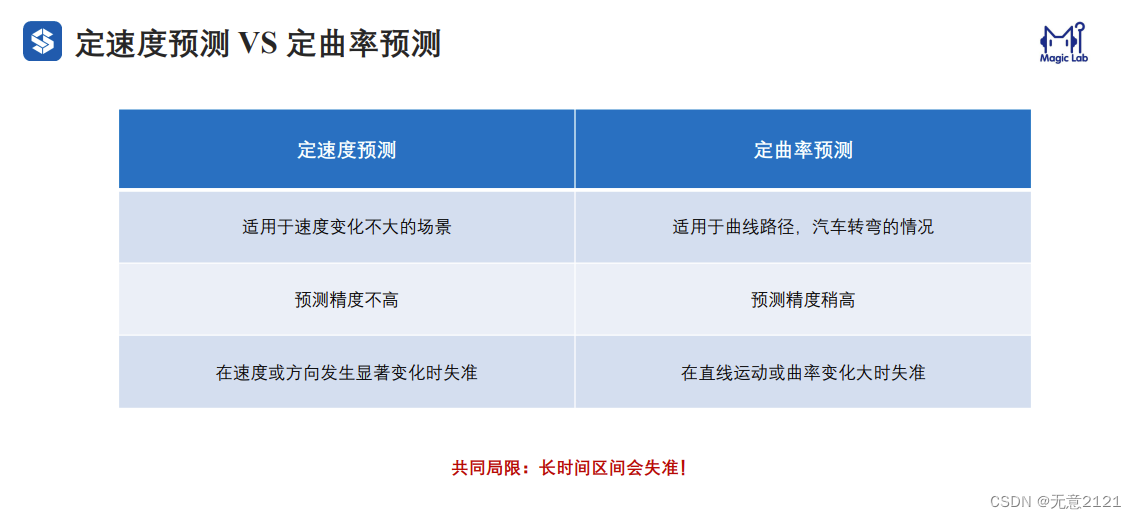
Constant Velocity 模型:假设目标做匀速直线运动,再恒定速度的基础上加上高斯分布的噪声
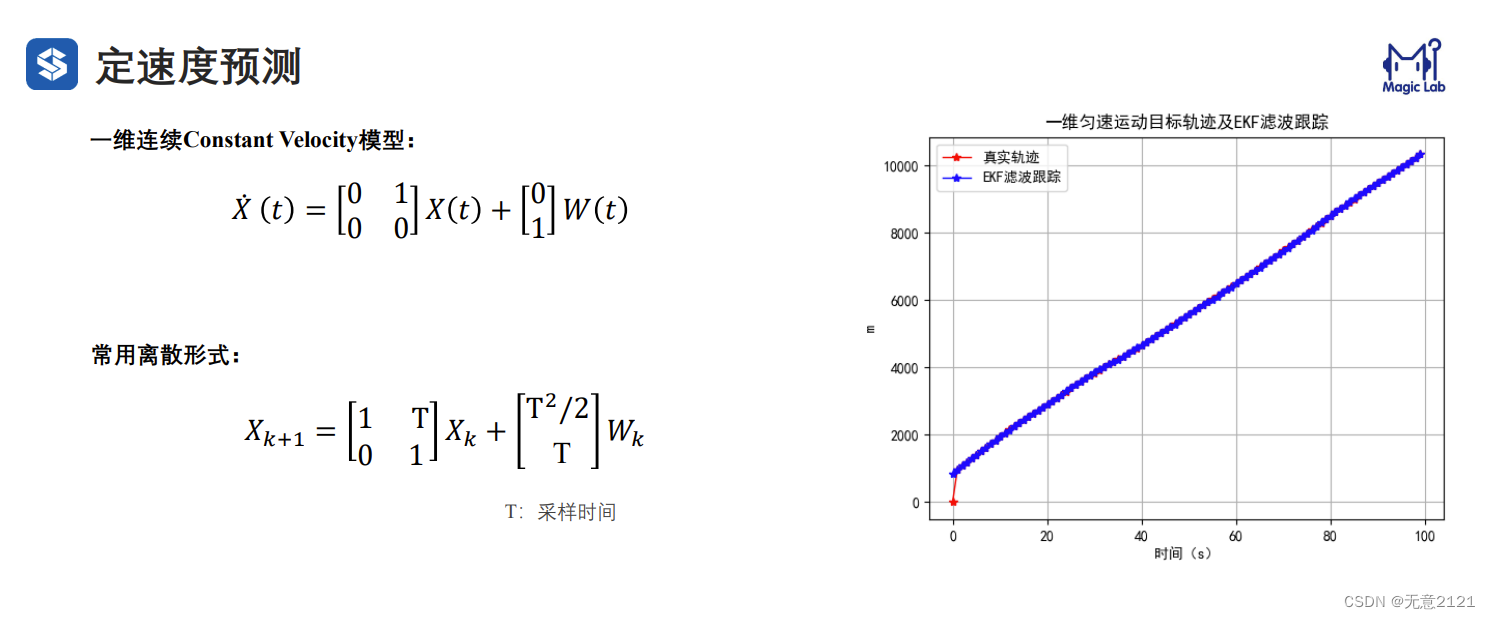
这是CV模型的连续表达形式与离散表达形式

对于二维来说,CV模型比之前的一维模型复杂一些,可以看作两个方向的合成(矩阵的拼接)
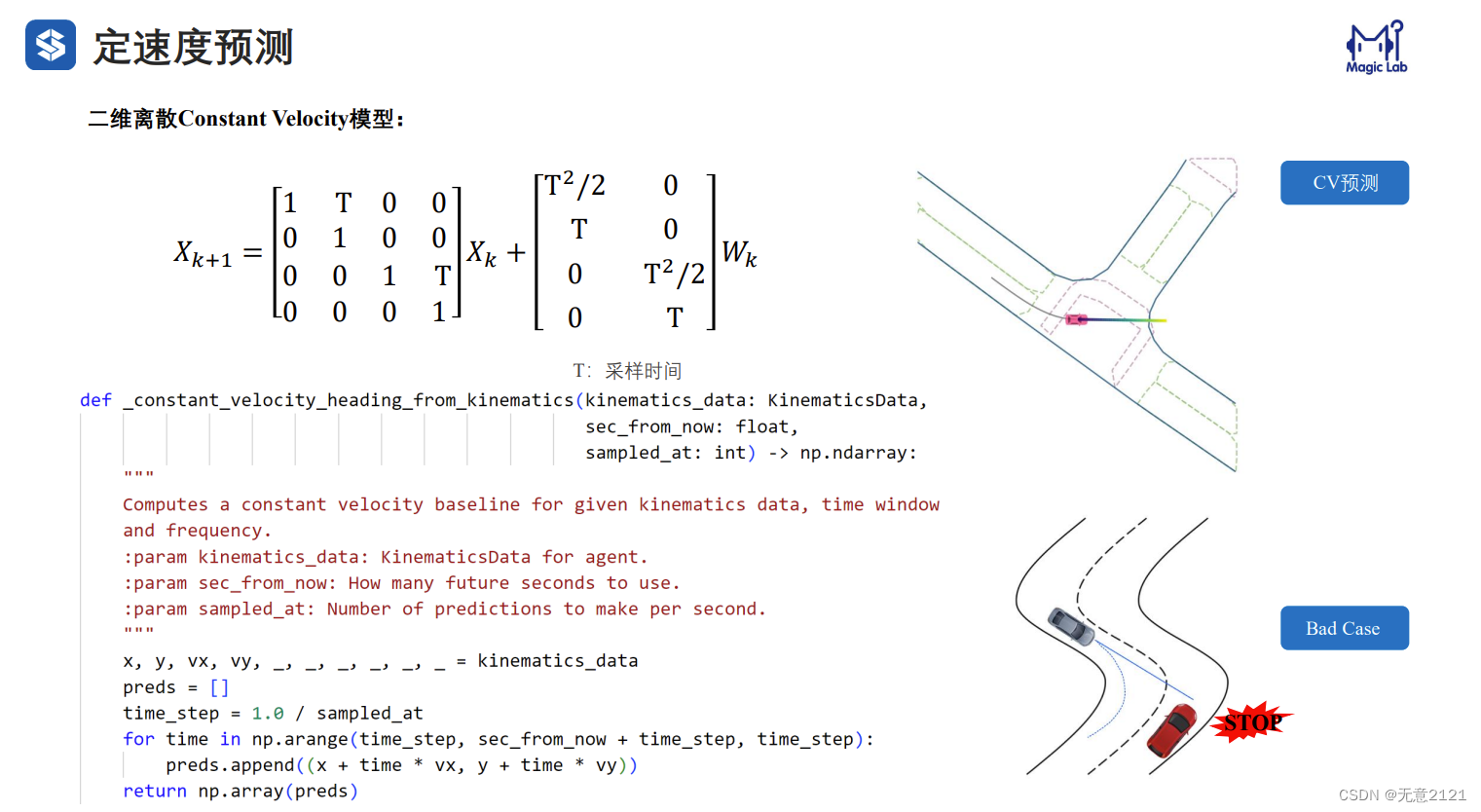 在代码中一般通过离散形式去simulate,这是一个CV模型的Python示例
在代码中一般通过离散形式去simulate,这是一个CV模型的Python示例
由右图可知,CV模型在遇到交叉路口或曲率较大的道路结构时效果较差
2 Constant Turn 模型
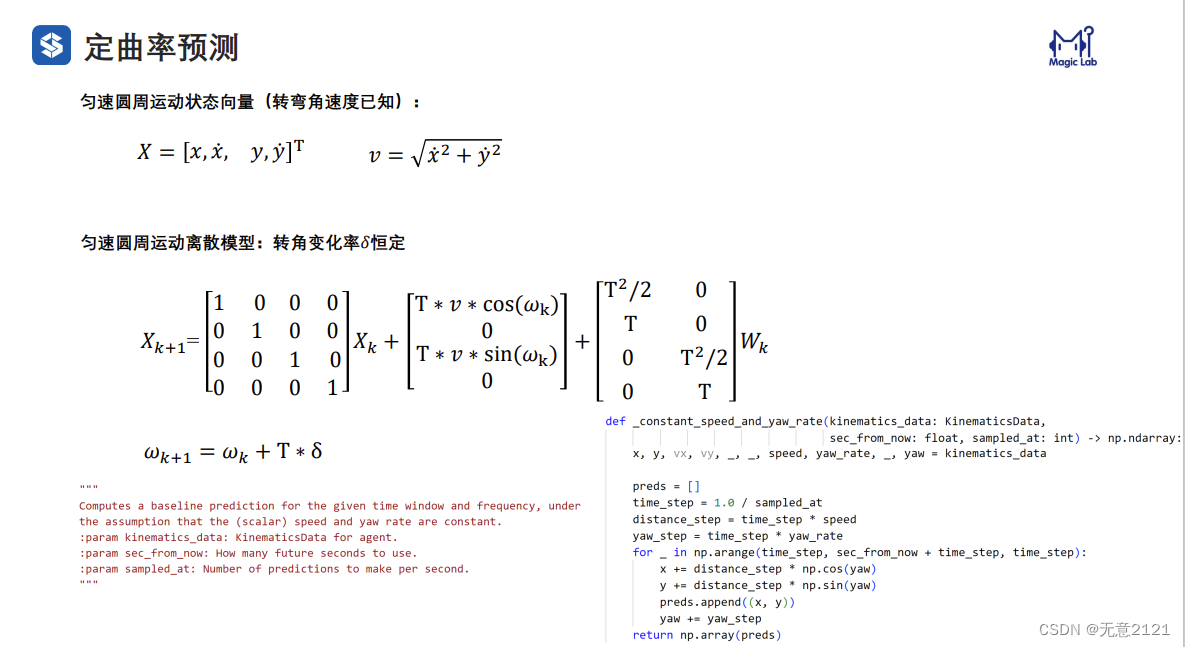
定曲率模型假设目标以恒定角速度行驶
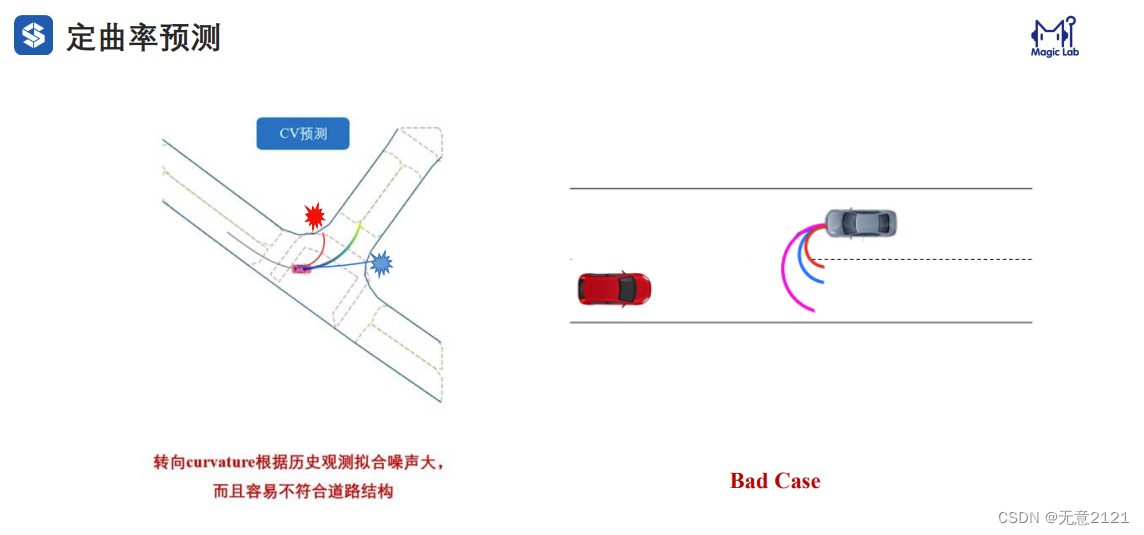
但是CT模型在曲率估计不准的情况下,很容易导致预测目标的轨迹出现严重抖动
比如在十字路口或掉头场景,噪声将导致预测轨迹出现较大偏差