目录
1.概述
2. 整车通信的限制
3 如何保证融合ECU的功能安全和信息安全
4.小结
1.概述
上篇文章主要聊了当前电子电气架构以及未来电子电气架构的特点,简述了即将要面临的挑战,下面我们继续讲述挑战。
2. 整车通信的限制
下一代架构主要以以太网为通信手段,这给当前车内以CAN\CANFD为通信手段的控制器带来了通信挑战,主要是由CAN\CANFD -> Ethernet Packet -> CAN\CANFD的数据转发带来的滞后 。因此我们可以看到,不管是S32G、TC4xx还是Stellar均针对这几项提出了网关硬件加速功能,如下图:

此外,由于CAN基本是广播、周期性且payload很小,与以太网基于事件和点对点传输的特征相悖,如何提高整车网络利用率,我暂时没有想到。
3 如何保证融合ECU的功能安全和信息安全
Safety和Security毫无疑问是当前汽车产业最火的两个概念, 在网联汽车盛行的大背景下,如何防止整车出现系统失效、防止黑客攻击是重中之重。
假设把上述不同ASIL的ECU融合到一个ECU中,如何保证不同安全等级的ECU访问相同资源时不会产生更大的危害。
很显然,这难度比现在域控的HARA\TARA提升了不止两档。
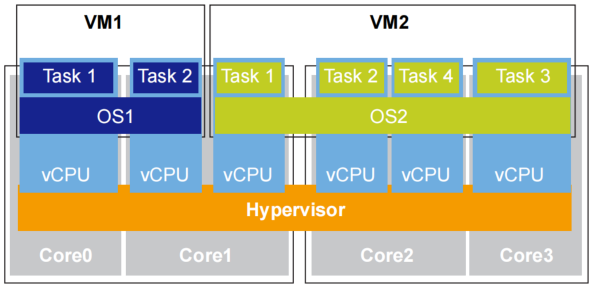
从个人来看,首先是SoC或者MCU内部的隔离机制要做好,针对vECU有配置不同的功能资源组,那么映射到芯片内部就是需要定义好VMID以及其资源划分,如下图:
其次面向资源的使用权限,是需要统一管控的,所以我们可以看到不管是TC4xx、S32Z、Stellar均使用了两级MPU,当然也是因为Stellar和S32Z都用的R52+,内核本身就有EL2\1 MPU。
最后就是信息安全也需要支持虚拟化,那么如何让vECU用起来就像独占内置HSM一样,这不管是软件考虑的事情,硬件也需要提供对应机制。
4.小结
上述只是个人对于下一代MCU共性的思考总结,其实还有很多没有考虑到,
例如vECU复用外设资源该如何实现;系统如何给vECU分配memory和实际CPU资源;
这是一个庞大的系统工程,这里抛砖引玉,欢迎大家积极讨论。