同ROS 1一样,Turtlesim(小海龟)例程往往是大家首次熟悉ROS世界的唯一不二之选(如同刚接触编程的同学,老师会让大家打出“Hello World”的道理一样),很多教学视频及书籍也同样如此,为何?麻雀虽小五脏俱全呗。其不光包含了ROS核心的节点、主题(topic)、服务(service)、动作(action)等等概念及功能,还涵盖了一些基本工具的使用体验,在普及知识点的目标下大家还能愿意继续玩下去,这种寓教于乐的方式值得鼓掌。呐,ROS也没那么难嘛(这种信心继续保持啊)~~
安装Turtlesim
如果大家按照我的上一篇文章安装了完整桌面版的话,这步可以免了(已经包含),如果你是安装了精简版,那么可以通过如下命令进行安装(本系列文章所运行的环境都是Linux),
$sudo apt update$sudo apt install ros-iron-turtlesim安装完成后,通过如下命令进行检查,
$ros2 pkg executables turtlesim如果终端打印出如下内容:
turtlesim draw_square
turtlesim mimic
turtlesim turtle_teleop_key
turtlesim turtlesim_node
说明你搞的不丑。
小海龟(Turtlesim)启动
打开一个终端(别忘了第一件事就是source /opt/ros/iron/setup.bash配置环境变量,如果嫌每次都得弄一遍忒麻烦可以将其加入永久的环境变量中去,方法保密),输入如下命令启动一个节点:
$ros2 run turtlesim turtlesim_node效果如下图所示,我们的小海龟已经立定在蔚蓝的大海中了,
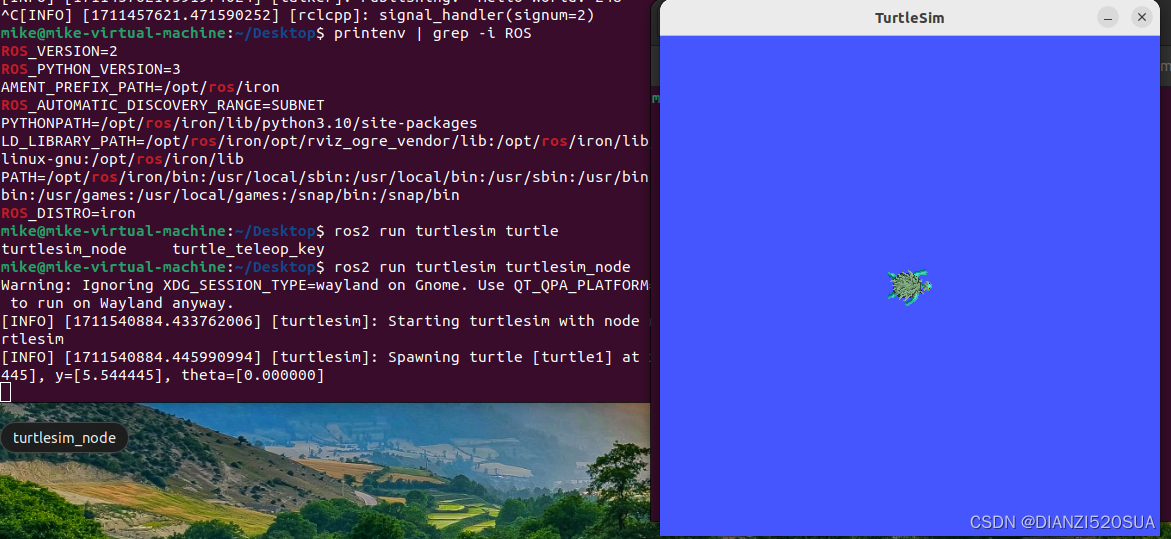
终端上输出这个节点的名称(/turtlesim)、孵化出的海龟名称(turtle1)以及它的坐标位姿(x/y/theta)。
到此,结束?那个我们是不是感觉还遗漏了什么,小海龟得“游”起来呀!
小海龟(Turtlesim)游动
打开另外一个终端,执行下面命令,启动控制节点:
$ros2 run turtlesim turtle_teleop_key
大家发现没有,G|B|V|C|D|E|R|T,低头看看你们手指下的键盘,以F键为中心的一圈按键,用来控制小海龟的游动方向(左边是我们曾经最为熟悉的WASD),不信?我们来瞧瞧看。
切换小写,分别摁一下F周遭的键(鼠标单击在控制节点那个终端,不要单击在小海龟出现的那个窗口),小海龟会响应旋转到对应的方向,当切换为大写时,摁一下B,小海龟才会朝一个方向游动(个人感觉控制起来也不是那么方便啊)。

有同学可能看的更远一点,会考虑到,为什么摁一下键盘,小海龟才移动一点路程而不是一劳永逸地游下去,这个问题,我们可以考虑这样一种场景,当你的控制系统与实际受控的机器人(或小车)由于某种原因断联时,你还希望它一直动下去吗。
我们可以分别执行下面的命令看看大概看看当前的节点、主题、服务、动作信息,我们再打开一个终端:
$ros2 node list
$ros2 topic list
$ros2 service list
$ros2 action list
节点有俩,/teleop_turtle和/turtlesim,主题有/parameter_events、/rosout、/turtle1/cmd_vel、/turtle1/color_sensor、/turtle1/pose,

一共21个服务及1个动作(/turtle1/rotate_absolute),后面的章节我们会详细了解这些概念及功能,今天轻松点,先瞅一眼,过过瘾。
安装rqt
国际惯例,如果你之前安装的不是完整版,那么你需执行如下命令进行安装:
$sudo apt update$sudo apt install ~nros-iron-rqt*用用rqt
rqt工具可以帮助我们更加具体化的了解、操作这些相关的服务、主题等等概念和功能,我们执行如下命令启动rqt工具(之前的小海龟及控制节点不要关闭):
$rqt开始弹出的窗口没有啥有用的内容(仅一些文字提示),不用急,在窗口的上面菜单栏选择Plugins > Services > Service Caller,

如果现象与上图不一致,那么可以尝试恐吓一下(执行命令rqt --force-discover)。
我们刷新下service,在其右侧的下拉框选中spawn服务,


给小海龟找个伴
根据月老手册的指示,我们先通过双击对应Expression列下面对应的x和y修改坐标值(如x=1.0,y=1.0)即可在对的时间对的地方出现对的龟,然后点击右侧的Call按钮(调用spawn服务),如果先点击call再配置坐标,会出现下面的状况,我们的命运之龟穿越过头了,直接越界修仙了,我们的小海龟依然伤心太平洋,

而根据正确的指示行动后,你看,来了,TA来了,TA带着轻快的步伐走来了,请看现场直播画面,

刷新下服务后,大家会发现,我们穿越的龟和终成眷属的那对龟对应的服务均出现在最新的名单之上。

给小海龟添点料
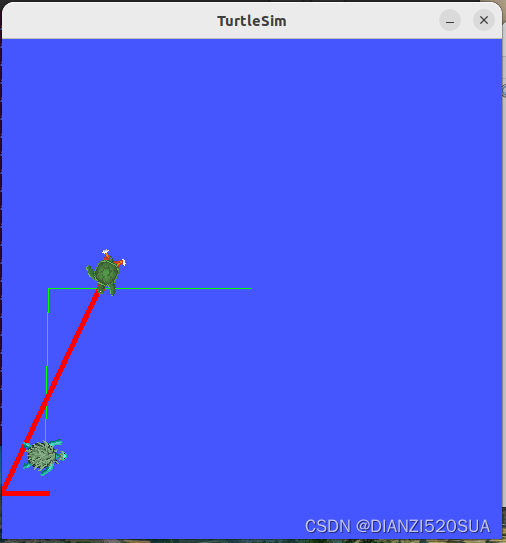
我们继续体验下另外一种服务set_pen,改变下小海龟游动的轨迹颜色,参照之前的修改逻辑,取g值为255(r红g绿b蓝,0~255),滑条绿线,也可修改下线条宽度,确认好后点击Call按钮,然后切换到控制终端界面,控制小海龟(turtle1的游动),我们主动点,游到TA身边,搞定。

双龟同游
下面我们再来体验下今天的最后一个技能点,重映射(主题)。我们在控制turtle1时,却控制不了turtle3的移动(turtle2小朋友已经活在另外一个时空了,我们别去管它),怎么办,好办,我们何不搭个顺风车,来个成龟之美,另开一个终端(source ROS 2环境变量)执行如下命令,开启另外一个控制节点,给turtle3的cmd_vel主题送波能量:
$ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=turtle3/cmd_vel使得我们的turtle3也能收到这样的移动数据,当控制键盘时(分别控制两个控制节点终端),实现了二龟之间的游戏,达到了我们成龟之美的目的(为了区别二者的轨迹,我们可以修改下turtle3的轨迹颜色及粗细,大家自己尝试做下)。
本篇完。