<STM32>STM32F103ZET6-可调参数定时器1互补PWM输出
一 基础工程
本例基础工程以正点原子战舰V3开发板配套 库函数 开发例程《实验9 PWM输出实验》;
在此例程基础上进行 定时器1互补PWM输出。
二 代码修改
基于例程,只需修改main.c即可,修改后内容如下:
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "timer.h"void GPIO_TIM1_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;TIM_BDTRInitTypeDef TIM_BDTRInitStructure;/* GPIOA and GPIOB clock enable */RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);/* GPIOA Configuration: Channel 1 and 2 as alternate function push-pull */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);/* GPIOB Configuration: Channel 1N and 2N as alternate function push-pull */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14;GPIO_Init(GPIOB, &GPIO_InitStructure);/* TIM1 clock enable */RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1 , ENABLE);/* Time base configuration */TIM_TimeBaseStructure.TIM_Period = 0;TIM_TimeBaseStructure.TIM_Prescaler = 0;TIM_TimeBaseStructure.TIM_ClockDivision = 0;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);/* PWM1 Mode configuration: Channel1 */TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;TIM_OCInitStructure.TIM_Pulse = 0;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;TIM_OC1Init(TIM1, &TIM_OCInitStructure);TIM_OC2Init(TIM1, &TIM_OCInitStructure);/* Automatic Output enable, Break, dead time and lock configuration */TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable;TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable;TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_OFF;TIM_BDTRInitStructure.TIM_DeadTime = 0;TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable;TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High;TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable;TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure);TIM_Cmd(TIM1, ENABLE);TIM_CtrlPWMOutputs(TIM1, ENABLE);
}void Adjust_TIM1(uint16_t freq, uint16_t deadTime, uint16_t dutyCycle)
{uint16_t period = (SystemCoreClock / freq) - 1;uint16_t pulse = (period + 1) * dutyCycle / 100;TIM1->ARR = period;TIM1->CCR1 = pulse;TIM1->CCR2 = pulse;TIM1->BDTR &= ~TIM_BDTR_DTG;TIM1->BDTR |= deadTime;
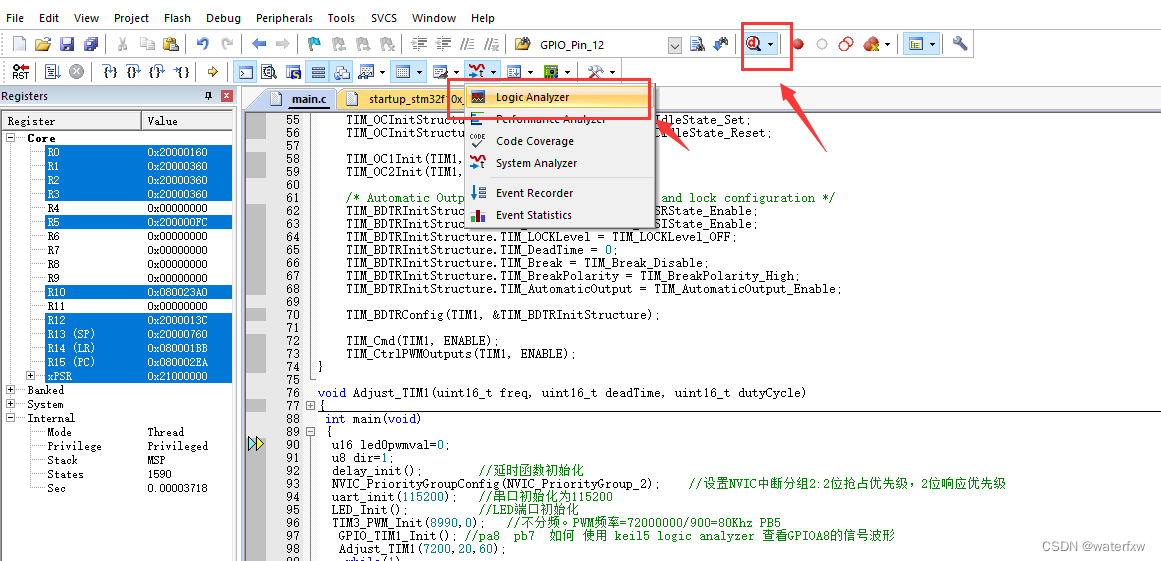
}int main(void){ u16 led0pwmval=0;u8 dir=1; delay_init(); //延时函数初始化 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级uart_init(115200); //串口初始化为115200LED_Init(); //LED端口初始化TIM3_PWM_Init(8990,0); //不分频。PWM频率=72000000/900=80Khz PB5GPIO_TIM1_Init(); //pa8 pb7 如何 使用 keil5 logic analyzer 查看GPIOA8的信号波形Adjust_TIM1(7200,20,60);while(1){delay_ms(10); if(dir)led0pwmval++;else led0pwmval--;if(led0pwmval>300)dir=0;if(led0pwmval==0)dir=1; TIM_SetCompare2(TIM3,led0pwmval); } }其中函数 void GPIO_TIM1_Init(void) 和void Adjust_TIM1(uint16_t freq, uint16_t deadTime, uint16_t dutyCycle) 是新增 内容。
GPIO_TIM1_Init():用以初始化定时器 互补输出;
Adjust_TIM1():用以修改定时器1的输出频率、占空比 以及死区时间。
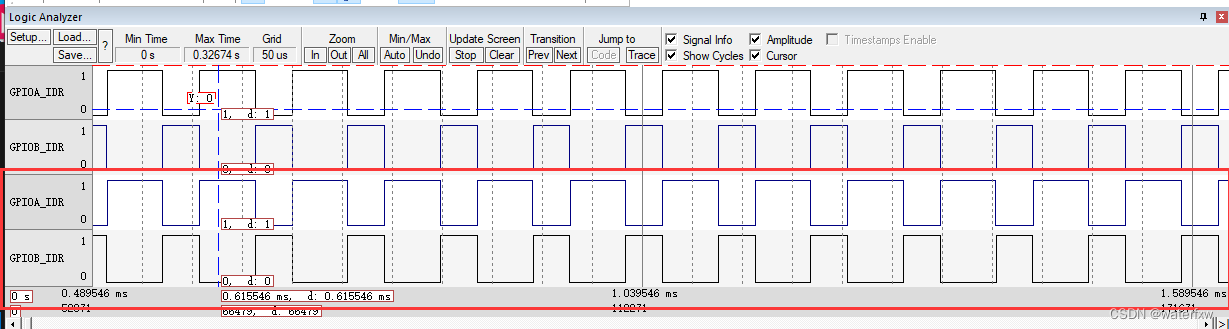
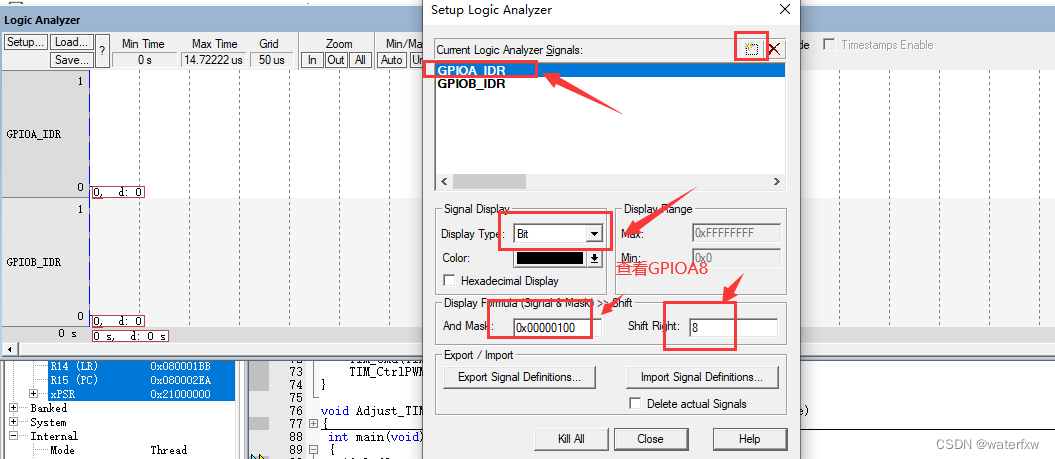
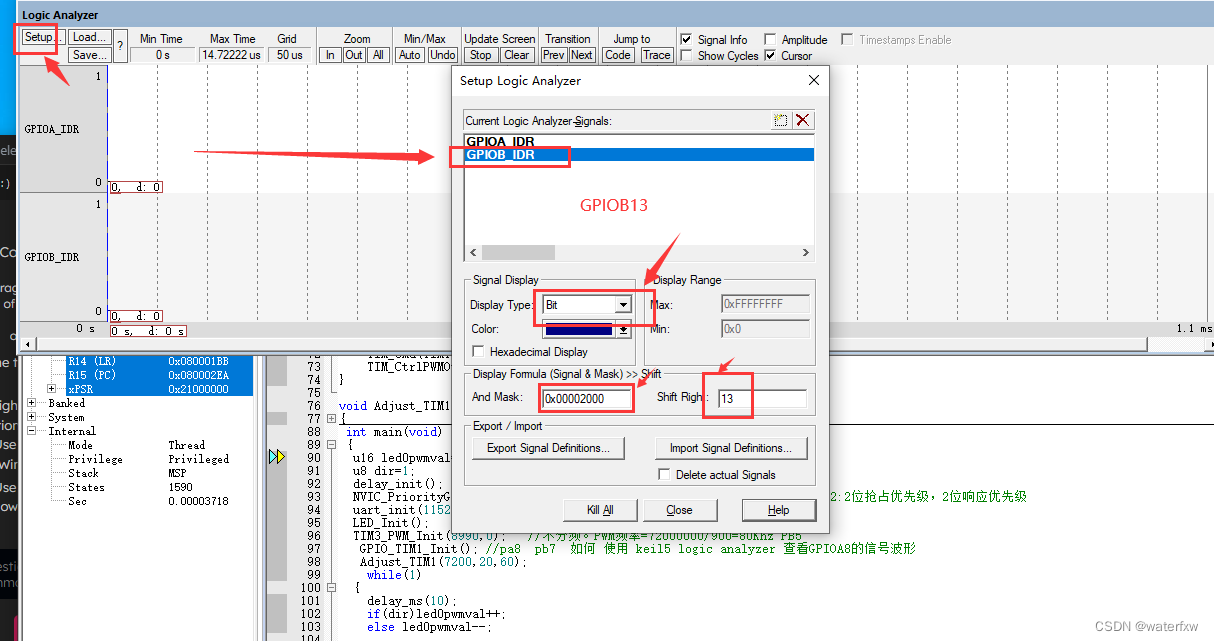
三 查看波形
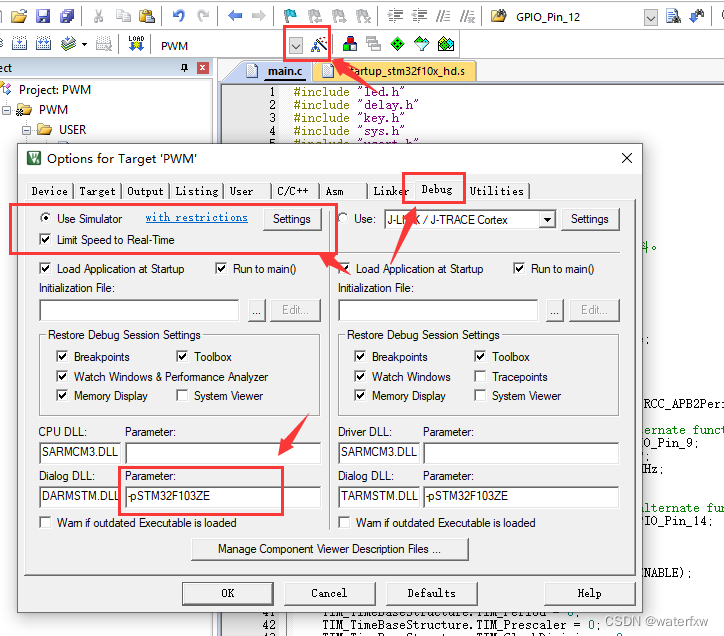
3.1 配置
3.2 debug
3.3 运行
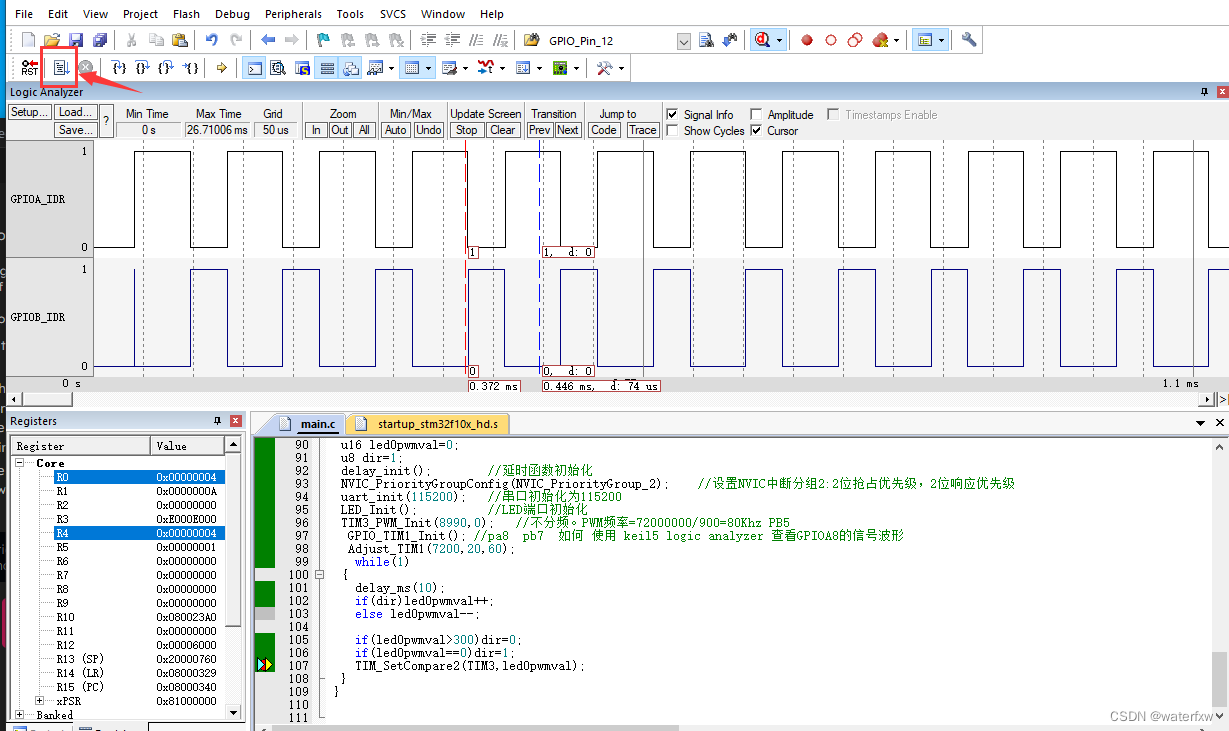
四 结论
配置完成TIM1的PWM输出后 可看到两路PWM为互补输出波形。
五 拓展
在上述代码中其实以及配置了 第二组的PWM互补输出。分别是GPIOA9 和 GPIOB14,以及 使用 TIM_OC2Init(TIM1, &TIM_OCInitStructure);初始化;并通过TIM1->CCR2 = pulse;配置占空比。
拓展查看波形如下: