1.总结任务调度算法之间的区别,重新实现一遍任务调度算法的代码。
抢占式调度:高优先级的任务可以打断低优先级任务的执行。抢占式调度适用于任务优先级不同的任务。
时间片轮转:相同优先级的任务有相同的时间片(1ms),当时间片耗尽,任务必须退出。
>1抢占式调度

>2 时间片轮转

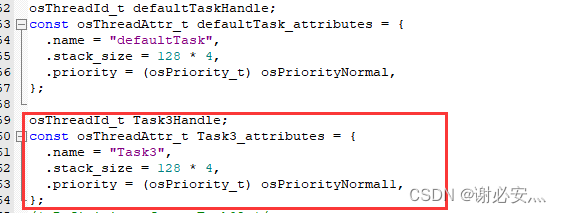
2.总结静态创建任务和动态创建任务的区别,以及动态创建任务和静态创建任务的源码分析步骤。
1.动态创建不需要指定具体的栈只需要指定栈的大小,栈会通过pvPortMalloc动态创建出来,静态创建任务需要具体的栈(通过数组来指定),还需要提供栈的大小。
2.动态创建需要消耗的系统资源会比静态创建任务要多。
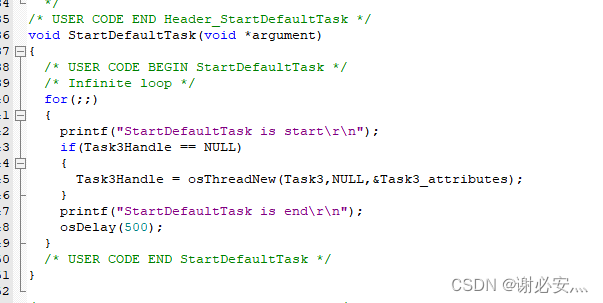
3.动态创建任务适用于需要随时申请和随时释放的场景,静态创建适用于任务数量确定的情况下。
3.总结任务的状态,以及任务状态之间的转换关系。
1.Ready:就绪态,当任务被创建后就会进入到就绪态。
2.Running:运行态,任务的代码正在执行。
3.Blocked:阻塞态,当任务在等待时间,或者是信号量,互斥量的时候进入阻塞态。
4.Suspended:挂起态,当任务被挂起后任务还存在但是不运行。
Ready->Running:当调度器选择了当前任务,让当前任务的代码执行。
Running->Ready:当任务执行结束后,重新进入就绪态
Blocked->Ready:当等待的事件完成后,就进入就绪态(时间到了,等待到了信号量,互斥量)
Blocked->Suspeded:使用vTaskSuspend函数让任务进入挂起态
Ready->Suspeded:使用vTaskSuspend函数让任务进入挂起态
Suspeded->Ready:使用vTaskResume函数让任务进入就绪态
Running->Suspeded:使用vTaskSuspend函数让任务进入挂起态
Running->Blocked:等待事件进入阻塞态