目录
一、串口简介
二、串口驱动设计
三、串口发送
四、串口接收处理
五、PM2.5数据接收处理
六、printf重定义
七、总结
一、串口简介
串口在单片机的开发中属于非常常用的外设,最基本的都会预留一个调试串口用来输出调试信息,串口时序这里就不谈了,主要来看看STM32中串口是怎么运行的。
void UART1_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;// GPIO_Mode_AF_ODGPIO_Init(GPIOA, &GPIO_InitStructure); //TXGPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_Init(GPIOA, &GPIO_InitStructure); //RX USART_InitStructure.USART_BaudRate = BAUD_UART1;//波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b;//数据长度USART_InitStructure.USART_StopBits = USART_StopBits_1;//停止位USART_InitStructure.USART_Parity = USART_Parity_No;//奇偶校验USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收和发模式USART_Init(USART1, &USART_InitStructure); //初始化串口NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //使能串口中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //主优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道NVIC_Init(&NVIC_InitStructure); //初始化NVICUSART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//接收中断USART_Cmd(USART1, ENABLE); //使能串口 g_sUART1.USARTx=USART1;g_sUART1.PortNum=1;g_sUART1.pBuff=g_u8UART1_Buff;//把数据指针指向接收缓冲区g_sUART1.total_len=UART1_LEN;
}先从初始化开始,基本上就是打开对应的时钟,初始化引脚,配置串口参数,配置接收中断,最后使能串口。
/*
================================================================================
描述 :串口中断函数
输入 :
输出 :
================================================================================
*/
void USART1_IRQHandler(void)
{if(USART_GetITStatus(USART1, USART_IT_RXNE) == SET)//获取接收状态{g_sUART1.pBuff[g_sUART1.iRecv]=USART_ReceiveData(USART1);//缓存接收字节 USART_ClearITPendingBit(USART1, USART_IT_RXNE);//清理中断位USART_ClearFlag(USART1, USART_FLAG_RXNE);//清理标志位g_sUART1.iRecv++;//接收长度加1if(g_sUART1.iRecv>=UART1_LEN)g_sUART1.iRecv=0;}else if (USART_GetFlagStatus(USART1, USART_FLAG_ORE) != RESET)//接收错误{USART_ReceiveData(USART1);
// USART_ClearITPendingBit(USART1, USART_IT_ORE);USART_ClearFlag(USART1, USART_FLAG_ORE);}
}串口是接收一个字节产生一个中断,不要再中断函数里面有过多的操作,就是连续缓存数据就好,其他的操作在外部程序中去执行;另外,如果串口数据接收错误或者溢出经常会发生ORE错误,导致一直进中断,程序直接卡死,这里就要处理下这个错误,避免卡死。
二、串口驱动设计
我这里要重点说明的是设计思想,根据下面的头文件可知,首先定义一个结构体,用来存放串口的配置信息;结合附图,在初始化阶段把串口地址、串口号、缓冲区指针和长度都赋值了;最后将定义的三个串口结构体用extern 暴露给外部文件使用。
#ifndef __DRV_UART_H__
#define __DRV_UART_H__#include "drv_common.h"typedef struct
{USART_TypeDef* USARTx;u8 PortNum;//串口号u8 *pBuff;//数据指针u16 iRecv;//已接收长度u16 iDone;//已处理长度u16 total_len;//总长度
}UART_Struct;extern UART_Struct g_sUART1;
extern UART_Struct g_sUART2;
extern UART_Struct g_sUART3;void UART_Init(void);
void UART1_Init(void);
void UART2_Init(void);
void UART3_Init(void);void UART_Send(u8 PortNum, u8 *buf, u16 len);
void UART_Clear(UART_Struct *pUART);void UART1_Send(u8 *buf, u16 len);
void UART2_Send(u8 *buf, u16 len);
void UART3_Send(u8 *buf, u16 len);#endif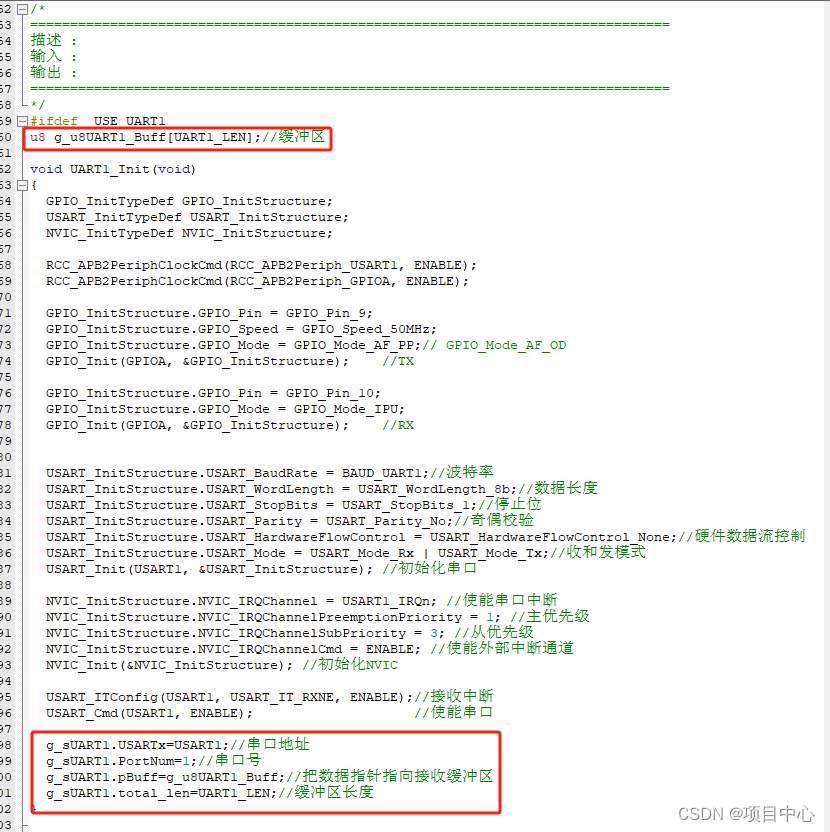
三、串口发送
串口发送较为简单,注意点就是while状态检测,一个字节发送完成才能发送下一个字节;还有就是最后的延时2ms,这个主要是在实际测试中发现有时候最后一个字节发送不完整,特别是RS485发送的时候,加个延时就能解决了。
/*
================================================================================
描述 :串口1发送
输入 :
输出 :
================================================================================
*/
void UART1_Send(u8 *buf, u16 len)
{u16 i;for(i=0;i<len;i++){while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET); //发送完成USART_SendData(USART1,buf[i]);}while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET); //发送完成 delay_ms(2);
}四、串口接收处理
串口在接收中断函数里不断缓存数据,在应用层只需要引用相应数据指针即可,这里以调试串口指令处理为例,具体代码如下。
首先引用串口1指针,然后在while循环里不断检测是否有收到数据,如果iRecv>0,那么说明有数据,但是此时不一定已经接收完成了,所以定义了recv_len缓存当前的数据长度,经过5ms延时后,如果recv_len和iRecv相等,那么就说明接收完整了,可以做进一步的数据处理。
接下来是数据处理,根据个人应用具体修改,这里我是复位、取消订阅和PWM设置指令,在开发过程中做调试使用,项目完成后可删除;具体就是使用strstr()函数去检索是否包含指定字符串,然后根据指令去执行对应的动作。
最后就是要用UART_Clear(pUART);清理下缓冲区数据。

五、PM2.5数据接收处理
以下是PM2.5传感器的说明书,波特率是9600,传感器每隔1秒主动输出数据,其数据流的第一字节固定是0xA5,中间两字节是浓度值,最后一个字节是校验码。先思考下这种数据流应该如何解析?
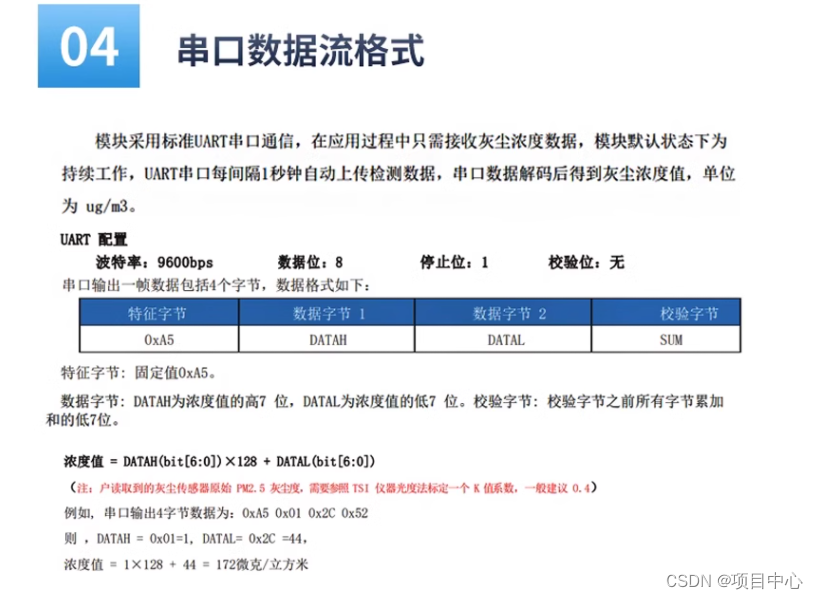
因为我们对PM2.5的实时性要求不会很高,三四秒更新一次即可,也就是三四秒处理一次串口的缓冲数据即可,代码如下所示。判断下接收长度是否大于等于4个字节,是的话进入校验环节,校验通过后再根据说明书组合浓度值,这里要注意的是,原始浓度值只是粉尘浓度,并不是PM2.5,根据XM净化器的数值大概标定下,乘以系数0.04;最后就是清理下缓冲区即可。

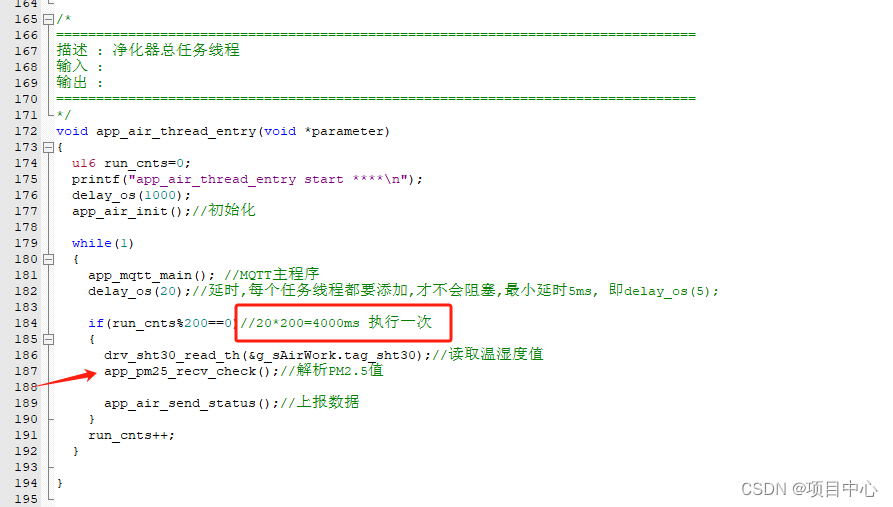
主程序或任务线程调用时就四秒调用一次,如下图所示,就是在每次上报时更新下数据即可。
六、printf重定义
printf是一个很有用的格式化输出函数,在PC端编写C语言的时候经常会用到,它会将数据打印到控制台上。那么,在单片机上,我们要如何把它的内容输出到指定的串口呢?这里就涉及到了重定义函数了,具体如下所示:
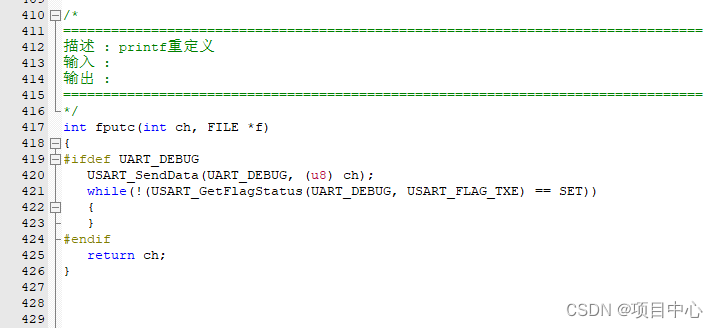
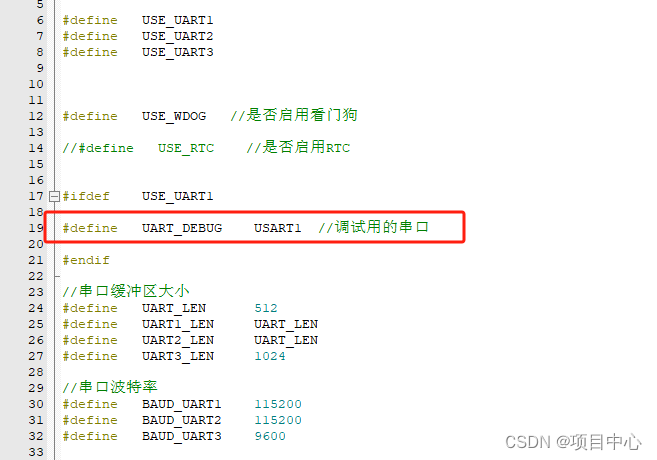
其中UART_DEBUG在user_opt.h中定义,这样可以决定是否需要输出、用哪个串口输出。
七、总结
至此,串口驱动也就差不多了,串口作为常用外设,几乎在每个项目中都会用到,这里通过驱动函数的形式保证了代码的重复利用的能力,再利用宏定义的方式对具体参数进行自定义配置,从而保证了通用型和灵活性。
本项目的交流QQ群:701889554
写于2024-3-30