0. 简介
我们在使用PCL时候,常常不满足于常用的降采样方法,这个时候我们就想要借鉴一些比较经典的高级采样方法。这一讲我们将对常用的高级采样方法进行汇总,并进行整理,来方便读者完成使用
1. 基础下采样
1.1 点云随机下采样
点云下采样是对点云以一定的采样规则重新进行采样,目的是在保证点云整体几何特征不变的情况下,降低点云的密度,进而可以降低相关处理的数据量和算法复杂度。随机下采样顾名思义,随机下采样就似乎在原始点云中随机采样一定点数的点。这种方法最终得到的点云数量也是固定的。
pcl::PointCloud<PointT>::Ptr cloud_sub(new pcl::PointCloud<PointT>); //随机下采样点云pcl::RandomSample<PointT> rs; //创建滤波器对象rs.setInputCloud(cloud); //设置待滤波点云rs.setSample(20000); //设置下采样点云的点数//rs.setSeed(1); //设置随机函数种子点rs.filter(*cloud_sub); //执行下采样滤波,保存滤波结果于cloud_sub
1.2 体素下采样
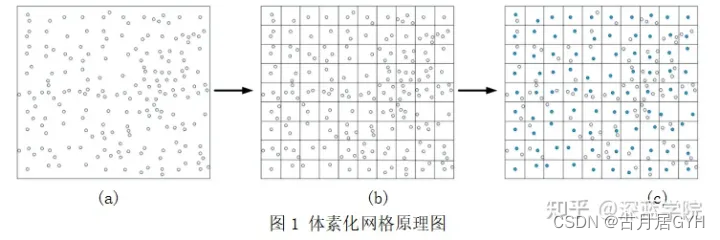
体素下采样的原理如图1所示,首先将点云空间进行网格化,也称体素化,即图1(b),网格化后的每一个格子称为体素,在这些划分为一个个极小的格子中包含一些点,然后对这些点取平均或加权平均得到一个点,以此来替代原来网格中所有的点,即图1(c)中蓝色的点。显然,网格选取越大则采样之后的点云越少,处理速度变快,但会对原先点云过度模糊,网格选取越小,则作用相反。
pcl::VoxelGrid<pcl::PointXYZ> sor; //创建体素网格采样处理对象sor.setInputCloud(cloud); //设置输入点云sor.setLeafSize(0.01f, 0.01f, 0.01f); //设置体素大小,单位:msor.filter(*cloud_filtered); //进行下采样1.3 均匀采样
均匀采样的原理类似于体素化网格采样方法,同样是将点云空间进行划分,不过是以半径=r的球体,在当前球体所有点中选择距离球体中心最近的点替代所有点,注意,此时点的位置是不发生移动的。球体半径选取越大则采样之后的点云越少,处理速度变快,但会对原先点云过度模糊,网格选取越小,则作用相反。
pcl::UniformSampling<pcl::PointXYZ> form; // 创建均匀采样对象
form.setInputCloud(cloud); //设置输入点云
form.setRadiusSearch(0.02f); //设置半径大小,单位:m
form.filter(*after_cloud); //执行滤波处理
1.4 增采样
增采样的特点是可极大的增加点云数据,但由于内插点的不确定性会导致最后输出的结果不一定准确。
//创建增采样对象
pcl::MovingLeastSquares<pcl::PointXYZ,pcl::PointXYZ> filter;
filter.setInputCloud(cloud); //设置输入点云
pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree; //定义搜索方法
filter.setSearchMethod(kdtree); //设置搜索方法
filter.setSearchRadius(0.03); //设置搜索邻域的半径为3cm
//Upsampling 采样的方法还有 DISTINCT_CLOUD, RANDOM_UNIFORM_DENSITY
filter.setUpsamplingMethod(pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointXYZ>::SAMPLE_LOCAL_PLANE); //对点云进行上采样
filter.setUpsamplingRadius(0.03); //设置采样半径大小,3cm
filter.setUpsamplingStepSize(0.02); //设置采样步长大小,2cm
filter.process(*after_cloud); //执行采样操作
1.5 滑动最小二乘法采样
滑动最小二乘法采样的原理是将点云进行了滑动最小二乘法的映射,使得输出的点云更加平滑。
pcl::PointCloud<pcl::PointNormal>::Ptr smoothedCloud(new pcl::PointCloud<pcl::PointNormal>); //定义法线
pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointNormal> filter;
pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree; //定义搜索方法
filter.setInputCloud(cloud); //设置输入点云
filter.setUpsamplingMethod(); //增加密度较小区域的密度对于holes的填补却无能为力,具体方法要结合参数使用
filter.setSearchRadius(10);// 用于拟合的K近邻半径。在这个半径里进行表面映射和曲面拟合。半径越小拟合后曲面的失真度越小,反之有可能出现过拟合的现象。
filter.setPolynomialFit(true); //对于法线的估计是有多项式还是仅仅依靠切线。true为加多项式;false不加,速度较快
filter.setPolynomialFit(3); // 拟合曲线的阶数
filter.setComputeNormals(true); // 是否存储点云的法向量,true 为存储,false 不存储
filter.setSearchMethod(kdtree); //设置搜索方法
filter.process(*smoothedCloud); //处理点云并输出
2. 最远点采样(Farthest Point Sampling)
这个PCL代码目前已经集成到https://github.com/farthest_point_sampling.hpp。这里我们来单独看一下调用代码,这里可以看到PCL中支持直接调用farthest_sampling这个函数可以实现最远点采样。最远点采样(Farthest Point Sampling)是一种非常常用的采样算法,由于能够保证对样本的均匀采样,被广泛使用,像3D点云深度学习框架中的PointNet++对样本点进行FPS采样再聚类作为感受野,3D目标检测网络VoteNet对投票得到的散乱点进行FPS采样再进行聚类,6D位姿估计算法PVN3D中用于选择物体的8个特征点进行投票并计算位姿。FPS算法原理:
- 输入点云有N个点,从点云中选取一个点P0作为起始点,得到采样点集合S={P0};
- 计算所有点到P0的距离,构成N维数组L,从中选择最大值对应的点作为P1,更新采样点集合S={P0,P1};
- 计算所有点到P1的距离,对于每一个点Pi,其距离P1的距离如果小于L[i],则更新L[i] = d(Pi, P1),因此,数组L中存储的一直是每一个点到采样点集合S的最近距离;
- 选取L中最大值对应的点作为P2,更新采样点集合S={P0,P1,P2};
- 重复2-4步,一直采样到N’个目标采样点为止。
点击PCL中常用的高级采样方法 - 古月居可查看全文