文章目录
- 1 背景
- 2 方法
- 2.1 数据来源
- 2.2 碰撞数据
- 3 碰撞事件分析
- 4 讨论
1 背景
这篇文章是讲waymo道路安全性能数据分析的,主要想表达的是waymo自动驾驶系统在安全上面的出色表现,以向政府、大众提高自己产品的公信力。
这篇文章分析的数据是自从2019年到2020年累积的,610万英里的自动驾驶里程,其中还包含65000英里的全无人驾驶里程。在这些里程下,waymo实际发生了18次道路真实碰撞事件,以及29起接管后仿真复现的29起碰撞事件,合计47次碰撞。那本文也是拿这47次碰撞去分析的waymo自动驾驶安全的。
接下来详细介绍一下各部分的内容。
2 方法
2.1 数据来源
数据来源如背景部分提到,包含两个:
- 全无人自动驾驶:驾驶位无人情况下,从2019年1月到2020年9月,累计65000英里
- 操作员自动驾驶:驾驶位有人看守下,2019全年累计610万英里
2.2 碰撞数据
在这篇文章中,waymo对碰撞的定义是,自动驾驶汽车与其他物体间有接触。也就是说这其中是包含行人非机动车什么的主动撞上自动驾驶汽车的事件
当然,在有操作员的汽车内,当遇到危险时,为了避免发生碰撞,操作员会接管汽车。因此在道路上的会有潜在的碰撞事件由于接管而无法观测到,这个时候需要仿真介入。waymo使用的方法是,用当时路上测试的自动驾驶算法版本,复现当时的道路场景,去看如果不接管,车继续开会不会撞上,以此来召回碰撞事件。
值得一提的是,在仿真场景中,由于社会车辆的行为是与当时路上的自动驾驶汽车交互的,在仿真环境中,障碍物的行为可能会失真。因此waymo对社会车辆进行了建模。虽然在长时间内对代理行为进行建模非常具有挑战性,但是在接管后的短时间内,理解合理的冲突&避免碰撞的行为是可行的。waymo使用人类避碰行为模型来建模社会车辆的短期反应(这篇论文是建模方法的一部分)。
3 碰撞事件分析
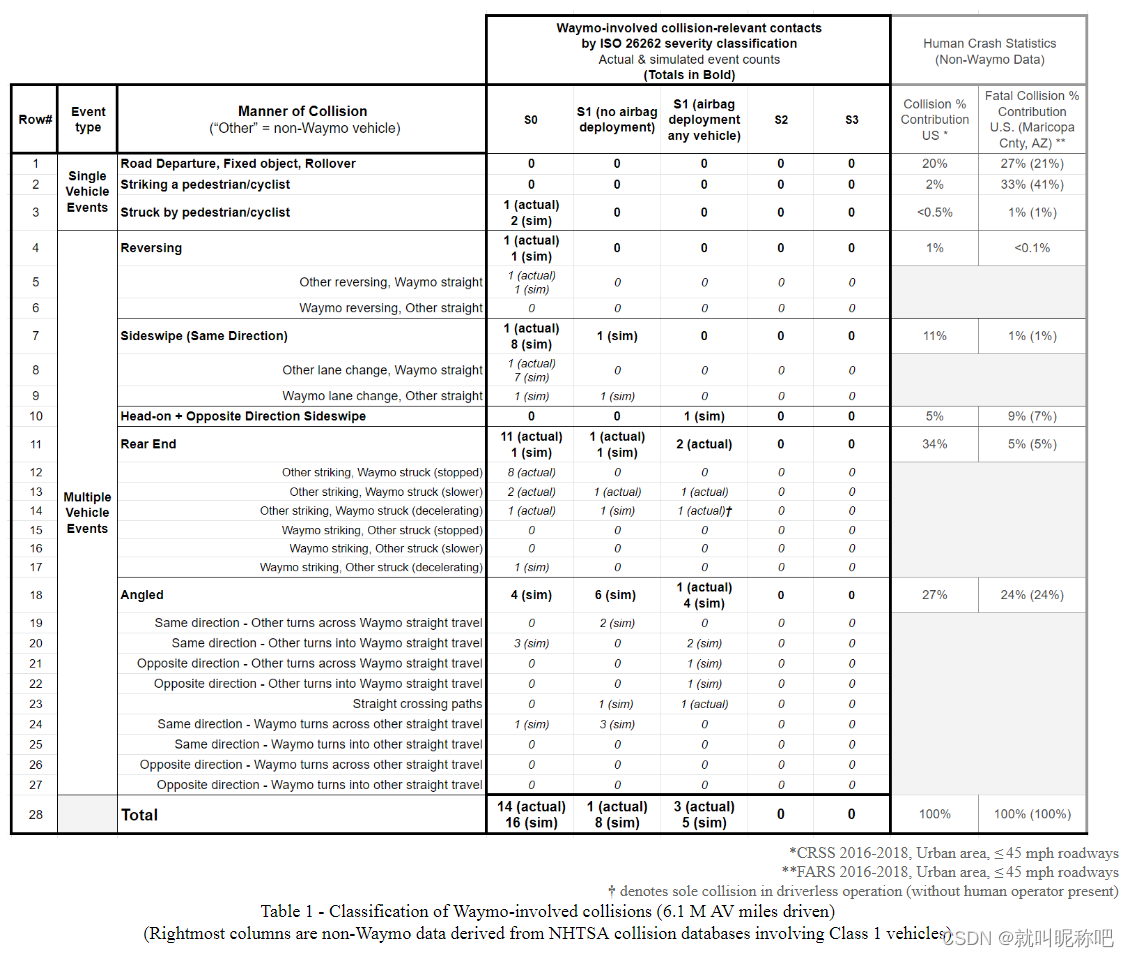
得到真实的&仿真召回的碰撞事件后,waymo对碰撞进行了分类。分类方法自然是通过碰撞的严重程度划分,如下图所示,这是一个总的图。左侧一级的分类是是否和机动车碰撞,第二级分类代表碰撞的类型,比如非机动车碰撞里会和行人、路肩等碰撞;机动车碰撞里会有追尾,侧刮等不同类型的分类。
碰撞的严重性是根据ISO 26262标准来分的:
- S0:无受伤
- S1:轻微至中度受伤
- S2:严重到危及生命(有概率存活)
- S3:危及生命(不确定存活)至死亡
waymo通过AIS伤害等级,将具体的碰撞事件划分到以上的4个类别中。例如S1代表至少10%的概率造成AIS1或以上的AIS等级的碰撞事件。waymo具体是通过速度变化和受力方向去评估伤害等级的。同时,为了提供有关更多S1级别事件严重性的信息,waymo将S1根据是否导致任何相关车辆实际/模拟展开安全气囊分成了两列。
表格的最右侧是人类的碰撞统计。
可以看到waymo的驾驶中是没有出现S2和S3的,表明他们很安全,这也是建立公信力需要有的表现。
4 讨论
本文得出的一些结论,总体上就是说waymo的安全性很高~~:
- 610万英里发生47起碰撞
- 16起追尾碰撞事件中,有8起涉及waymo在停车或逐渐减速时被撞,还有2起在匀速行驶时被撞,另外5起追尾的特点是,其他车辆对waymo自动驾驶汽车转弯时的减速行为反应不足
- Angled碰撞,15起,多发生在狮子路口,涉及车辆过路或转弯。其中11起特点是另一辆车没有适当地让出路权,另外4起是waymo右转时,社会车辆试图超车
- 10起测刮事件,有8个涉及社会车变道进入waymo停止的地方。
- 所有的非机动车碰撞伤害程度都是无伤
- 2起倒车事件涉及社会车低速撞到waymo车辆侧面
- 1起正面碰撞发生在夜间,社会车行驶方向错误
文章后面就是讲一些报告性的内容,关于局限性、未来的工作、waymo在做的事情等,干货不多,这篇论文内容还是较少的