ROS的第一个项目:输出Hello World
我们将学习如何创建一个简单的ROS(Robot Operating System)项目,该项目将在终端中输出"Hello World"。我们将使用Python语言进行编程。

环境准备
首先,确保你的计算机已经安装了ROS。如果还没有安装,可以参考ROS官方文档进行安装。
创建ROS包
打开终端(请确保已经创建了ros工作空间,不会请点击看以前的文章),导航到你的catkin工作区的src目录下,然后使用以下命令创建一个名为hello_world的ROS包:
cd ~/catkin_ws/src
# 这个路径是你自己ros项目文件,注意替换自己的路径 catkin_ws是我的ros项目名字
catkin_create_pkg hello_world std_msgs rospy roscpp
这将在src目录下创建一个名为hello_world的新目录,其中包含一些文件和目录。
创建Python脚本
在hello_world包中,我们需要创建一个Python脚本来发布消息。首先,我们需要在hello_world目录中创建一个名为scripts的新目录:
cd ~/catkin_ws/src/hello_world
mkdir scripts
# 这个路径是你自己ros项目文件,注意替换自己的路径 catkin_ws是我的ros项目名字
然后,在scripts目录中创建一个名为hello_world.py的新文件,并添加以下内容:
#!/usr/bin/env python
import rospy
from std_msgs.msg import Stringdef talker():pub = rospy.Publisher('chatter', String, queue_size=10)rospy.init_node('talker', anonymous=True)rate = rospy.Rate(10) # 10hzwhile not rospy.is_shutdown():hello_str = "hello world %s" % rospy.get_time()rospy.loginfo(hello_str)pub.publish(hello_str)rate.sleep()if __name__ == '__main__':try:talker()except rospy.ROSInterruptException:pass
记得给hello_world.py添加可执行权限:
chmod +x hello_world.py
编译包
在终端输入
cd ~/Desktop/ros_1/ #切换到自己的ros项目根目录
# 这个路径是你自己ros项目路径,注意替换自己的路径
catkin_make
source ~/Desktop/ros_1/devel/setup.bash
# 这个路径是你自己ros项目下的devel目录下setup.bash文件,注意替换自己的路径
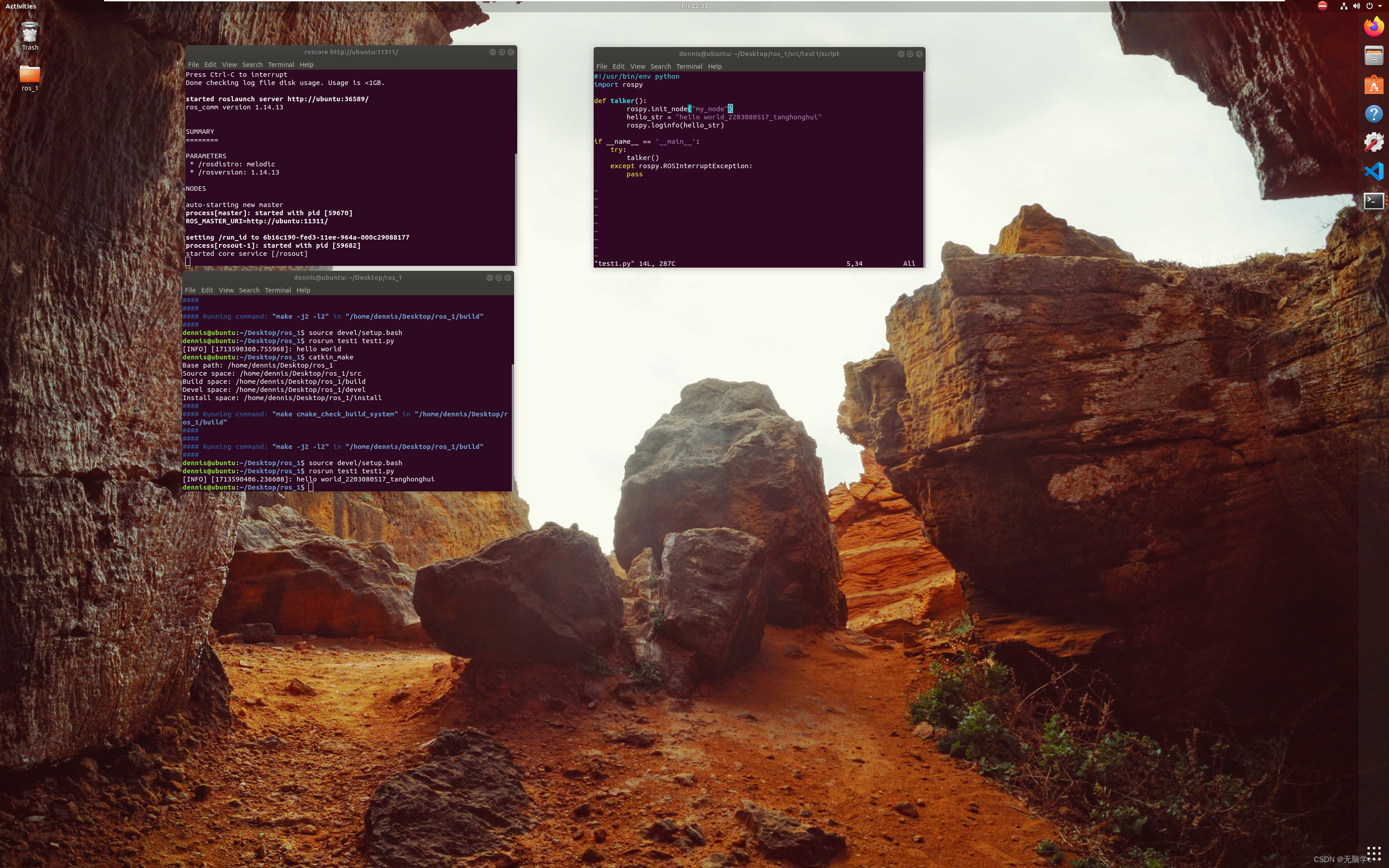
运行节点
现在,我们可以运行hello_world节点了。首先,需要启动ROS核心:
roscore
然后,在新的终端窗口中,运行我们的hello_world节点:
rosrun hello_world hello_world.py
你应该能在终端中看到"Hello World"的消息。