前段时间公众号后台有人问释放ROV的装置,由于只用过观察级ROV Valor,博主一直以为他说的是绞车,后来才明白他说的是中继器,在水中用来释放、控制和回收ROV的装置。
中继器TMS的全称是缆绳管理系统Tether Management System,是深水作业级ROV的水下重要组成部分,见下图。
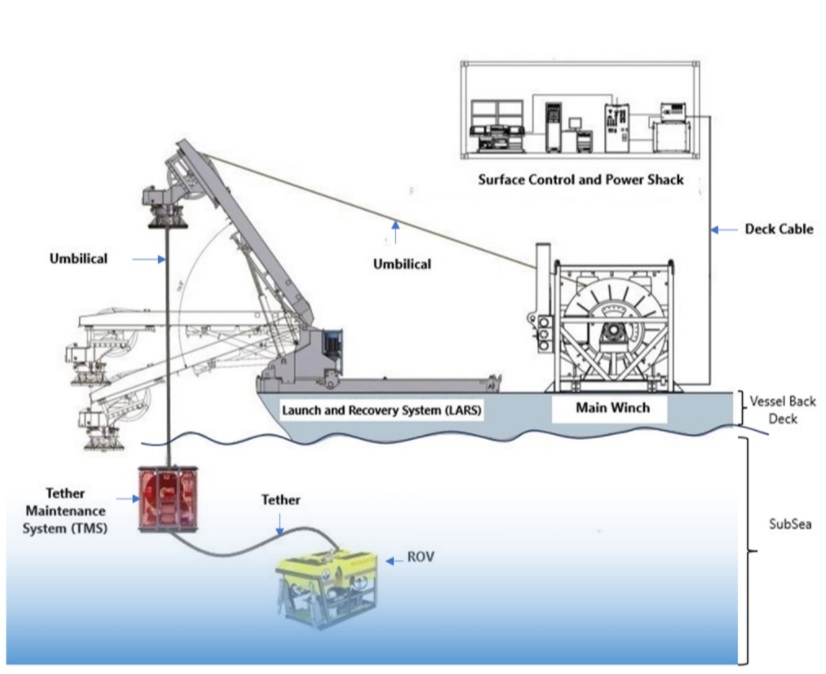
The Tether Management System stores and deploys the ROV tether cable so the ROV is decoupled from the surface vessel’s motion and is able to operate at a larger radius。(中继器(TMS)是用于储存和收放中性缆的装置,能消除或减小水面的扰动对ROV的影响,并增大ROV的作业半径。)
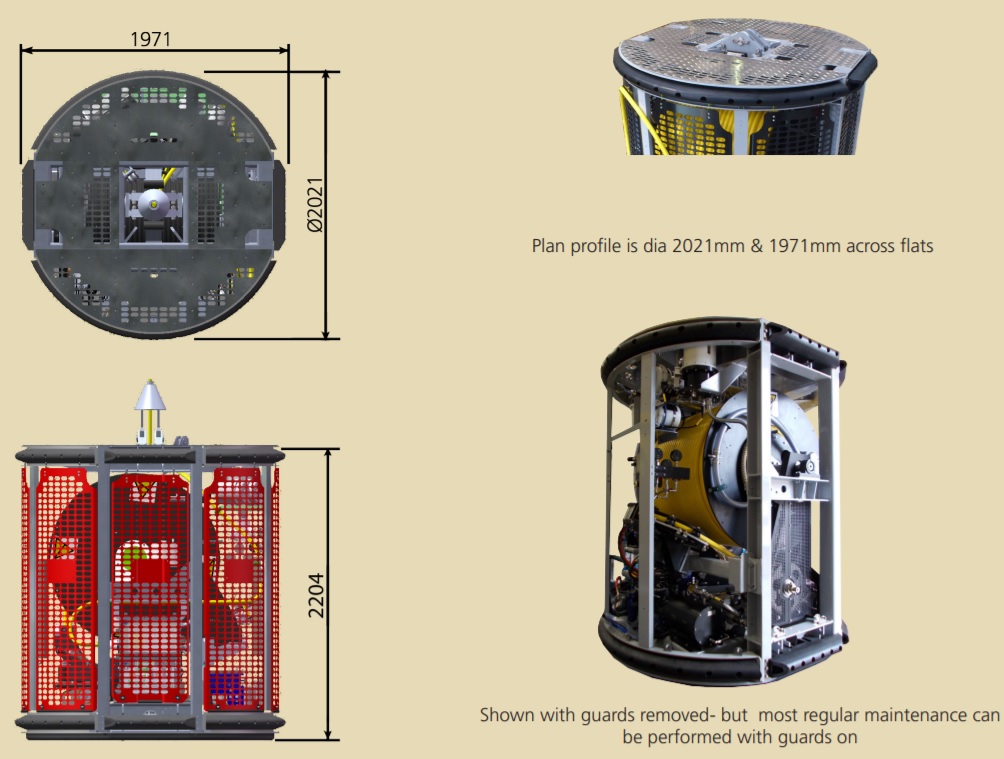
中继器主要由中性缆绞车、导缆通道、对接联锁 机构、液压动力单元、信息传输单元、控制单元、 传感器单元以及框架结构等组成。下图是顶置型(Top-Hat Type V)4000m级中继器,中性缆长约1000m,不含缆重约2.6吨,能装载重达9吨的ROV。
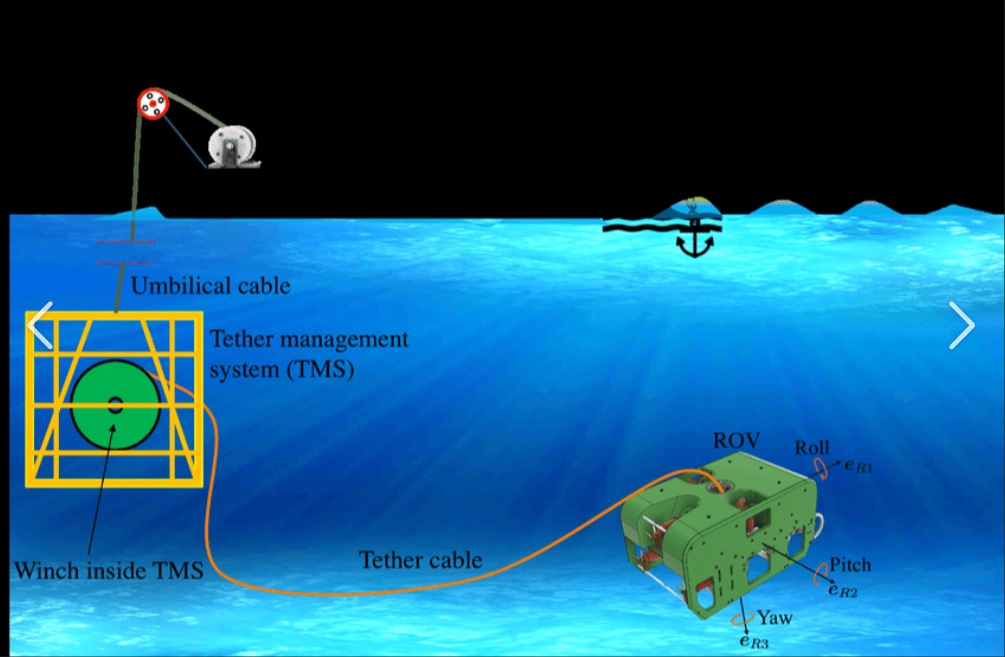
浅水ROV一般没有中继器,直接使用脐带缆与母船相连,ROV依靠自己的动力下沉到作业深度或从作业深度上浮到水面。如果作业水深较深,为了能迅速、准确地将ROV送到预定工作水深和较快地回收到水面,ROV必须配备中继器。中继器通过铠装缆与母船相连,通过中性缆(零浮力)与ROV相连,这样既能消除铠装缆和母船升沉、纵倾和横摇等对ROV的影响,也减少了 ROV本体推进系统所需要的功率。
在非工作状态时,中继器与ROV联锁在一起;当ROV开始下潜准备作业时,中继器可作为下潜的压载与ROV一起由铠装缆吊放至作业深 度。由于借助中继器的重量下潜,不需要ROV 推进器工作,既节省了能源,也提高了下潜速度。
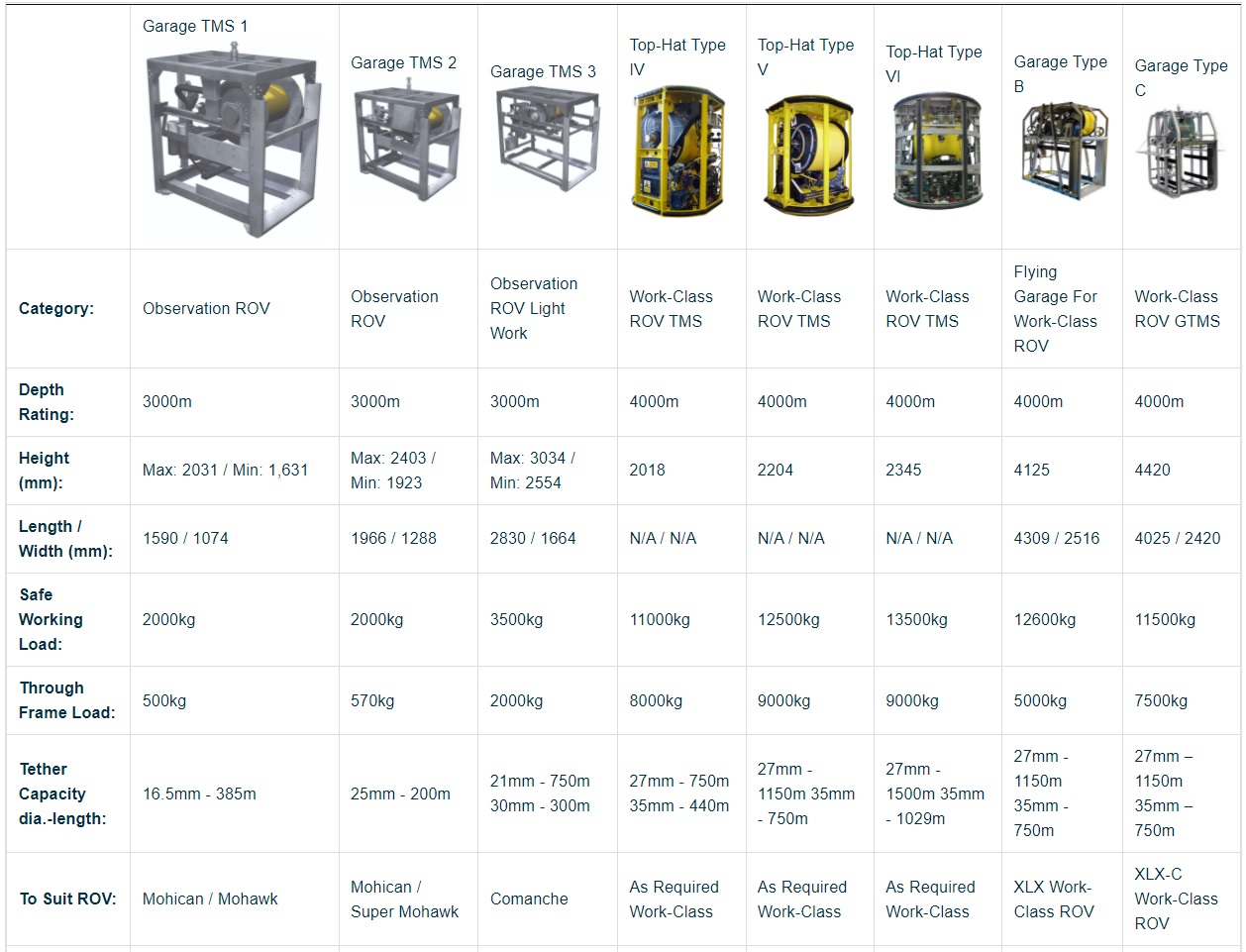
常用的TMS按照其结构形式和工作原理可分为二大类,即顶置式 (Top Hat)和车库式(Garage)。一般而言,对于大型的作业型ROV,由于其体型大、作业深度大, 会选择输出功率大、储缆长度长的顶置式TMS; 对于小型的ROV,由于其功率小,活动半径较小, 体型也比较小巧,可以选择车库式TMS。
国外中继器的主要是美国和英国。
下图是美国Schilling Robotics 公司的 XE (for eXtended Excursion)中继器,与他自己的HD和UHD ROV配套使用。其最大作业水深4000m,中性缆长度850m,直径35mm。
下面是美国论坛能源科技Forum Energy Technologies的中继器,顶置式和车库式都有。
下图是英国SAAB公司TMS Type 8型中继器,其最大作业水深1000m,中缆长200m,缆径20.6mm。

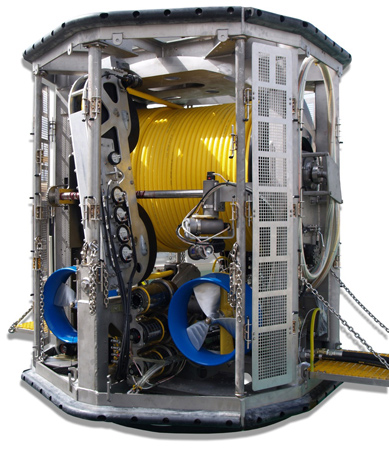
下图是英国SMD公司的中继器。

ULX 顶置式TMS的放大图如下。

国内研究中继器的单位有上海交通大学和中国科学院沈阳自动化研究所,他们的中继器都是为了与自己研制的ROV配套。
下图是上海交通大学为“海龙号“ROV配套的中继器。其最大工作水深3500m,中性缆长350m,缆径33mm。

下图是中国科学院沈阳自动化研究所为海星ROV配套的中继器。其最大工作水深1000m,作业半径200m。

中继器主要向大深度化、大功率化、多功能化、专 业化、系列化和智能化方向发展。
1)发展基于张力反馈式中性缆自动收放 技术,以减轻操作人员的负担和避免人为错误;
2)在中继器上设置推进器,以利于中继器与ROV之间进行交会对接;
3)甲板吊放系统(LARS)、TMS和ROV 之间由以往的同轴电缆或双绞线进行通讯向现在的光纤细缆通讯,以适应实时、双向、大流量和高速通讯传输信息的需要;
4)中性缆收放系统排缆机构由固定直径 向可变直径中性缆排缆机构发展,由机械式向可编程控制方向发展,由开环控制向闭环控制方向 发展,由人工遥控控制向自适应控制方向发展。
参考文献
ROV中继器的应用研究及发展趋势_赵俊海
我国深海作业级ROV技术现状及发展展望_沈克
https://f-e-t.com/subsea/vehicles/tether-management-systems/
https://f-e-t.com/wp-content/uploads/2019/10/tms-type-5.pdf
https://blog.tmcnet.com/robotics/2010/08/schilling-nets-two-more-uhd-rov-orders.html
https://subsea-rov.com/images/pdfs/spec-sheets/rovs/genIII.pdf
https://www.technipfmc.com/media/zrvesc22/uhd-iii-rov-datasheet.pdf
https://www.technipfmc.com/media/wr2lj04g/hd-rov-datasheet.pdf
https://www.marinevision.es/en/diving-pro/saab/tms_2.html
https://www.saabseaeye.com/uploads/seaeye_tiger_and_lynx.pdf
https://www.smd.co.uk/our-products/work-class-rovs/garage-tms/
https://www.smd.co.uk/wp-content/uploads/2016/12/Tophat-TMS.pdf
https://cuti.sjtu.edu.cn/Data/View/273
http://sia.cas.cn/kycg/cgzh/202008/t20200827_5677598.html