前言
Xacro(XML Macro)是ROS(Robot Operating System)中用于处理URDF(Unified Robot Description Format)文件的一个宏处理工具。它允许你在URDF文件中定义和使用宏,这样可以减少重复的代码,并使得机器人描述更加清晰和易于管理。通过xacro,你可以定义变量、包含其他文件、执行条件语句等,这些功能都使得编写和维护复杂的机器人模型变得更加容易。
到目前为止,如果你正在家里按照这些步骤设计自己的机器人,你可能会对做各种数学计算以获取能够正确解析的非常简单的机器人描述感到厌倦。幸运的是,你可以使用xacro包来简化这个过程。它提供了三个非常有用的功能。
- 常量
- 简单数学运算
- 宏
在URDF中利用Xacro,会使人更易读懂及维护。
动动手
使用Xacro
xacro的典型用法如下:
$xacro model.xacro > model.urdf在launch文件里面使用xacro,我们需要使用Command替代方式给robot_state_publisher传参。
path_to_urdf = get_package_share_path('turtlebot3_description') / 'urdf' / 'turtlebot3_burger.urdf'
robot_state_publisher_node = launch_ros.actions.Node(package='robot_state_publisher',executable='robot_state_publisher',parameters=[{'robot_description': ParameterValue(Command(['xacro ', str(path_to_urdf)]), value_type=str)}]
)一种加载机器人模型(自动加载xacro/urdf)更简单的方式是使用urdf_launch功能包。
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.substitutions import PathJoinSubstitution
from launch_ros.substitutions import FindPackageSharedef generate_launch_description():ld = LaunchDescription()ld.add_action(IncludeLaunchDescription(PathJoinSubstitution([FindPackageShare('urdf_launch'), 'launch', 'display.launch.py']),launch_arguments={'urdf_package': 'turtlebot3_description','urdf_package_path': PathJoinSubstitution(['urdf', 'turtlebot3_burger.urdf'])}.items()))return ld在URDF文件的顶部,必须指定一个命名空间才能正确解析文件。例如,以下是有效xacro文件的前两行:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="firefighter">常量
我们下面看一段之前R2D2机器人的base_link的urdf定义。
<link name="base_link"><visual><geometry><cylinder length="0.6" radius="0.2"/></geometry><material name="blue"/></visual><collision><geometry><cylinder length="0.6" radius="0.2"/></geometry></collision>
</link>可以看到对于同样值的length和radius写了两次(虽然是在不同的属性标签里),如果一个文件里有多处同样的定义,再如果需要修改,那么就会重复修改多次,很烦也容易有遗漏。那有没有什么好的办法可以轻松科学一点呢?
那就是常量,我们可以将同样属性内容定义为一个常量,需要用到的对方引用此常量即可,来看看利用常量方式修改后的代码吧。
<xacro:property name="width" value="0.2" />
<xacro:property name="bodylen" value="0.6" />
<link name="base_link"><visual><geometry><cylinder radius="${width}" length="${bodylen}"/></geometry><material name="blue"/></visual><collision><geometry><cylinder radius="${width}" length="${bodylen}"/></geometry></collision>
</link>- 常量可以定义在xml文件的任何位置(不过是引用之前之后),一般建议放在文件的顶部为妥。
- 在引用常量值时,利用美元符号与花括号${constant}。
常量还有一种用法,拼接字符串,如下:
<xacro:property name=”robotname” value=”marvin” />
<link name=”${robotname}s_leg” />等效于
<link name=”marvins_leg” />数学运算
在${...}里面可以支持加减乘除(+、-、*、/)的写法,如下:
<cylinder radius="${wheeldiam/2}" length="0.1"/>
<origin xyz="${reflect*(width+.02)} 0 0.25" />同时,还可以支持如sin、cos等这样的运算函数。
宏
以下是xacro包中最大、最有用的组件。
简单宏
先来看一个简单无用的宏。
<xacro:macro name="default_origin"><origin xyz="0 0 0" rpy="0 0 0"/>
</xacro:macro>
<xacro:default_origin />等效于
<origin rpy="0 0 0" xyz="0 0 0"/>为什么上面的宏没意义?因为一般如果一个joint或link没定义原点,默认值就是0,与上面宏定义的等效,是不是多此一举。
关于宏有以下几个注意点:
- 从技术上讲,名称不是必需的元素,但您需要指定它才能使用它。
- <xacro:$NAME/>的每个实例都替换为xacro:宏标记的内容。
- 不同属性定义的宏顺序不同不影响实际的xml生成文件。
- 如果找不到具有指定名称的xacro,它将不会展开,也不会生成错误。
参数化宏
我们也可以参数化宏,使它们不会每次都生成完全相同的文本。当与数学功能相结合时,这将更加强大。
先来看一个R2D2机器人中简单宏的使用。
<xacro:macro name="default_inertial" params="mass"><inertial><mass value="${mass}" /><inertia ixx="1e-3" ixy="0.0" ixz="0.0"iyy="1e-3" iyz="0.0"izz="1e-3" /></inertial>
</xacro:macro>上述代码定义了一个名为default_inertial的宏,附带一个叫mass的参数(当有多个参数时用空格分开),当调用此宏时,可以像下面这样:
<xacro:default_inertial mass="10"/>也可以使用整个块作为参数。
<xacro:macro name="blue_shape" params="name *shape"><link name="${name}"><visual><geometry><xacro:insert_block name="shape" /></geometry><material name="blue"/></visual><collision><geometry><xacro:insert_block name="shape" /></geometry></collision></link>
</xacro:macro><xacro:blue_shape name="base_link"><cylinder radius=".42" length=".01" />
</xacro:blue_shape>- 若要指定块参数,请在其参数名称前包含一个星号*。
- 可以使用insert_block命令插入块。
- 根据需要可以多次插入块。
实际使用
xacro语言在允许我们做什么方面相当灵活。除了上面列出的默认惯性宏外,以下是在R2D2模型中使用xacro的一些有用方法。
我们通过下面的命令来瞅瞅通过xacro文件生成的模型:
$ros2 launch urdf_tutorial display.launch.py model:=urdf/08-macroed.urdf.xacro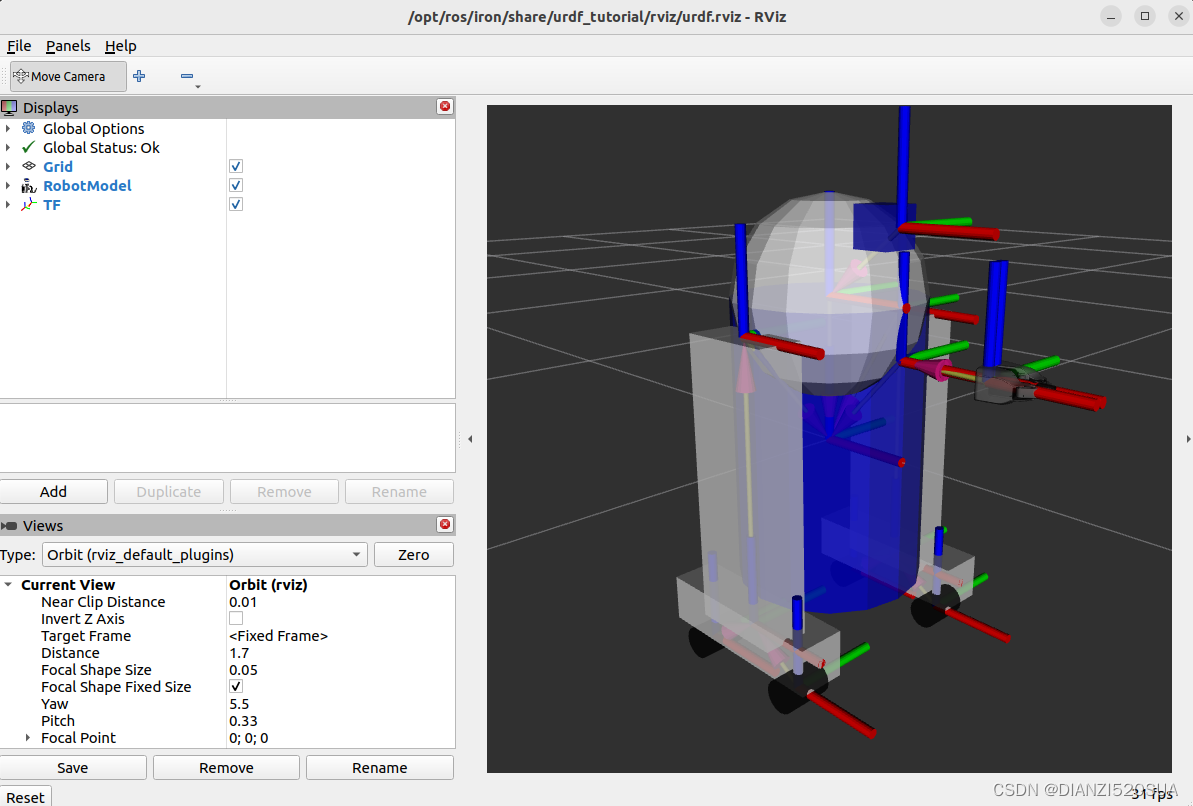
腿的宏
通常情况,我们希望在不同的位置创建多个外观相似的对象。可以使用宏和一些简单的数学来减少必须编写的代码量,就像我们对R2的两条腿所做的那样。
<xacro:macro name="leg" params="prefix reflect"><link name="${prefix}_leg"><visual><geometry><box size="${leglen} 0.1 0.2"/></geometry><origin xyz="0 0 -${leglen/2}" rpy="0 ${pi/2} 0"/><material name="white"/></visual><collision><geometry><box size="${leglen} 0.1 0.2"/></geometry><origin xyz="0 0 -${leglen/2}" rpy="0 ${pi/2} 0"/></collision><xacro:default_inertial mass="10"/></link><joint name="base_to_${prefix}_leg" type="fixed"><parent link="base_link"/><child link="${prefix}_leg"/><origin xyz="0 ${reflect*(width+.02)} 0.25" /></joint><!-- A bunch of stuff cut -->
</xacro:macro>
<xacro:leg prefix="right" reflect="1" />
<xacro:leg prefix="left" reflect="-1" />- 常见技巧1:使用名称前缀获得两个名称相似的对象。
- 常见技巧2:使用数学计算关节原点。在更改机器人大小的情况下,通过一些数学方法更改特性以计算关节偏移将省去很多麻烦。
- 常见技巧3:使用反射参数,并将其设置为1或-1。看看我们如何使用reflect参数将腿放在身体两侧的(base_to_${prefix}_leg origin标签属性中)。
本篇完。