神经网络的优化,通常我们使用梯度下降的方法对获取最优的参数,已达到优化神经网络的目的。另外,我们也可以对学习率进行调整,通过使用自适应学习率和学习率调度,最后,批量归一化改变误差表面,达到优化的目的。
同样,也会存在优化失败的时候,在收敛在局部极限值或者鞍点的时候,会导致优化失败。
局部最小值和鞍点
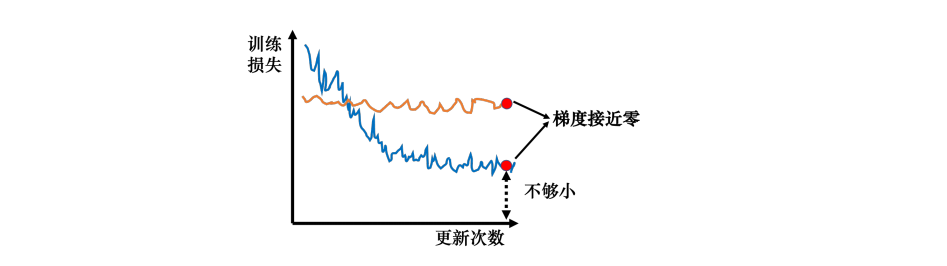
做参数优化的时候,我们总是希望,随着参数不断更新,训练的损失不断下降,最后收敛到我们可以接受的期望的值。但是经常会出现,随着参数的更新,训练损失不再下降,而这时的损失还达不到我们的期望,这个时候,很可能就遇到的局部最小值点,或者鞍点。
如图:
局部最小值与鞍点的异同
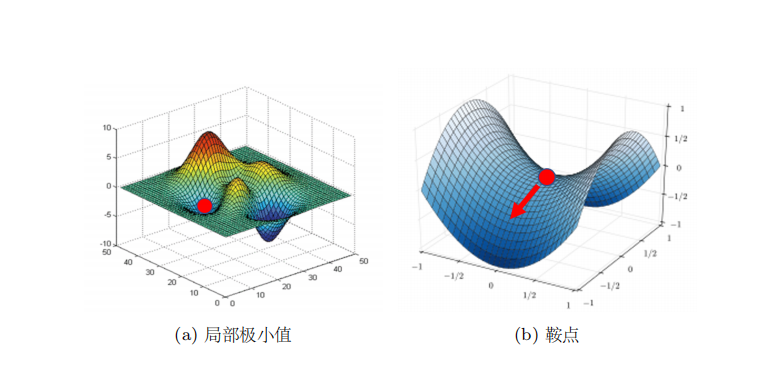
我们知道在做深度学习的时候,梯度下降收敛到局部最小值,此时梯度为零。但是并不是所有梯度为零的点都是局部最小值点,比如鞍点,
如图:
我们把梯度为零的点称为临界点。为什么要区分局部最小值点和鞍点呢?
- 当梯度为零时:在局部最小值点,我们不管往哪个方向走,梯度都会上升,但是鞍点不会,鞍点在局部最小值和最大值之间,在鞍点处,我们可以想办法让损失更低。
逃离鞍点
所以,只要我们遇到的是鞍点,那么我总能找到一个方向去更新参数,然后获得比鞍点更小的损失。
在一维空间的误差表面上,有一个局部最小值,但是在二维空间上,它可能就只是一个鞍点,也就是说当前空间中我们遇到的局部最小值点,在更高维空间中,可能是鞍点,我们就能找到是损失下降的更新参数的方向。
我们在训练一个神经网络的时候,会有很多参数,多大百万千万级,所以误差表面有非常高的维度,非常的复杂。(参数的数量代表了误差表面的维度)。所以我遇到的点很大的可能都是鞍点,而不是局部最小值点。
我们常常会遇到两种情况:损失仍然很高,却遇到了临界点而不再下降;或者损失降得很低,才遇到临界点。
批量和动量
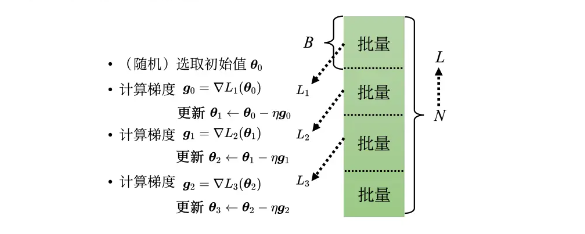
用来学习训练的数据集通常数据量非常大,如果以全部数据为对象求损失函数的值,计算会花费很长的时间,算几千万数据的损失函数的和,是不现实的。因此我们会从全部数据中选取出一部分,作为全部数据的““近似””,这部分数据被称为一个批量(batch),数据被分成很多个批量,遍历所有批量的过程被称为一个回合(epoch)。并且在分成批量的时候将数据打乱(shuffle)。
如图:
批量大小对梯度下降的影响
批量大小(Batch Size)
- 收敛速度:
- 较小的批量大小通常可以提供更频繁的权重更新,这有助于模型更快地收敛,因为每次更新都是基于最新的数据信息。
- 内存使用:
- 较小的批量大小意味着每次只处理少量数据,这减少了对内存的需求,使得可以在内存有限的系统上训练更大的模型。
- 计算效率:
- 较大的批量大小可以提高计算效率,因为现代硬件(如GPU)可以并行处理大量数据。较小的批量可能无法充分利用这些硬件的并行处理能力。
- 泛化能力:
- 使用较小批量大小的训练过程可能更不稳定,但有时可以导致更好的泛化能力,因为它允许模型从更多的数据扰动中学习。
- 训练稳定性:
- 较大的批量大小可以提供更平滑的梯度估计,从而减少训练过程中的噪声和振荡,使得训练过程更稳定。
- 局部最小值和鞍点:
- 较大的批量大小可能使模型更容易陷入局部最小值或鞍点,因为它们提供了更准确的梯度估计,但这也可能导致模型错过更优的全局最小值。
- 训练成本:
- 较小的批量大小可能需要更多的迭代次数来达到相同的损失水平,这可能会增加训练成本,尤其是在需要大量计算资源的情况下。
- 超参数调整:
- 批量大小的选择可能影响其他超参数(如学习率)的调整。例如,较大的批量大小可能需要较小的学习率来防止权重更新过大。
- 数据多样性:
- 在使用小批量训练时,每次更新都可能基于不同的数据样本,这有助于模型学习到数据的多样性。
- 过拟合风险:
- 使用较大的批量大小可能会增加过拟合的风险,因为模型可能会过度适应训练数据中的特定模式。
动量法
引用《深度学习详解》
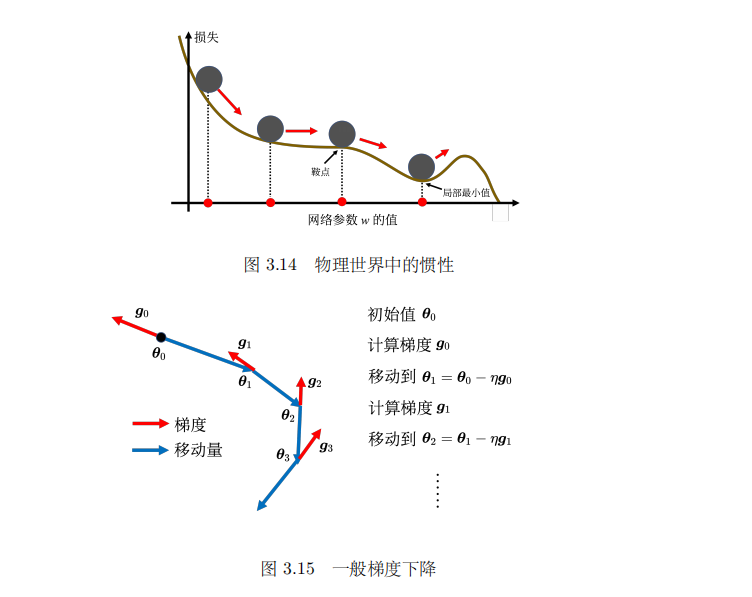
动量法(momentum method)是另外一个可以对抗鞍点或局部最小值的方法。如图3.14
所示,假设误差表面就是真正的斜坡,参数是一个球,把球从斜坡上滚下来,如果使用梯度
下降,球走到局部最小值或鞍点就停住了。但是在物理的世界里,一个球如果从高处滚下来,
就算滚到鞍点或鞍点,因为惯性的关系它还是会继续往前走。如果球的动量足够大,其甚至翻
过小坡继续往前走。因此在物理的世界里面,一个球从高处滚下来的时候,它并不一定会被
鞍点或局部最小值卡住,如果将其应用到梯度下降中,这就是动量。
如图:
动量法(Momentum Method)是一种在梯度下降优化算法中使用的技巧,旨在加速梯度下降的收敛速度,特别是在处理具有大量参数的深度学习模型时。动量法的核心思想是利用过去梯度的信息来调整当前的梯度更新,从而减少训练过程中的振荡,并帮助模型更快地收敛到最小损失值。
动量法的关键点:
-
动量项(Velocity):
动量法引入了一个动量项,它是一个累积的梯度平均值,可以看作是参数更新的“惯性”。 -
动量系数(Momentum Coefficient):
动量系数(通常表示为γ或β)是一个介于0和1之间的超参数,它决定了动量项在更新中所占的权重。较高的动量系数意味着过去的梯度信息在更新中占更大的比重。 -
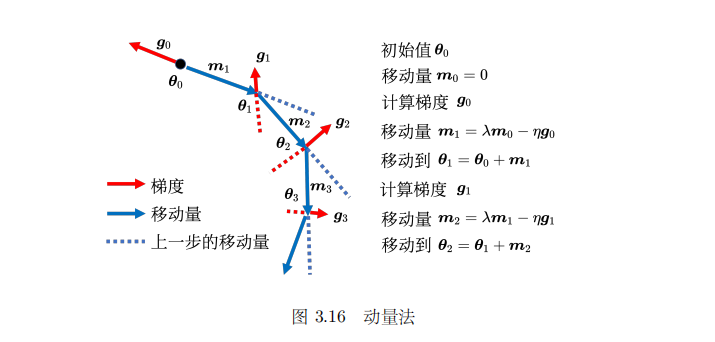
更新规则:
动量法的参数更新规则如下:
其中,\(v\) 是动量项,\(\eta\)是学习率,\(\nabla J(\theta_t)\) 是当前参数的梯度,\(\theta\) 是模型参数。
-
减少振荡:
动量法通过平滑梯度的方向,减少了在梯度下降过程中的振荡,特别是在梯度方向频繁变化的情况下。 -
加速收敛:
当梯度的方向在连续的迭代中保持一致时,动量项会逐渐增加,从而加速参数的更新,使模型更快地收敛。 -
避免局部最小值和鞍点:
动量法有助于模型跳出局部最小值和鞍点,因为它允许模型在梯度方向上获得更大的更新步长。 -
超参数调整:
动量法中的动量系数需要仔细调整,以确保动量项不会过大或过小,影响模型的收敛性。 -
Nesterov加速梯度(NAG):
Nesterov加速梯度是动量法的一个变体,它在计算动量项时考虑了参数的下一次更新,从而进一步加速收敛。





![P2757 [国家集训队] 等差子序列 和 CF452F Permutation](https://img2024.cnblogs.com/blog/3204443/202408/3204443-20240826154215090-448174330.png)