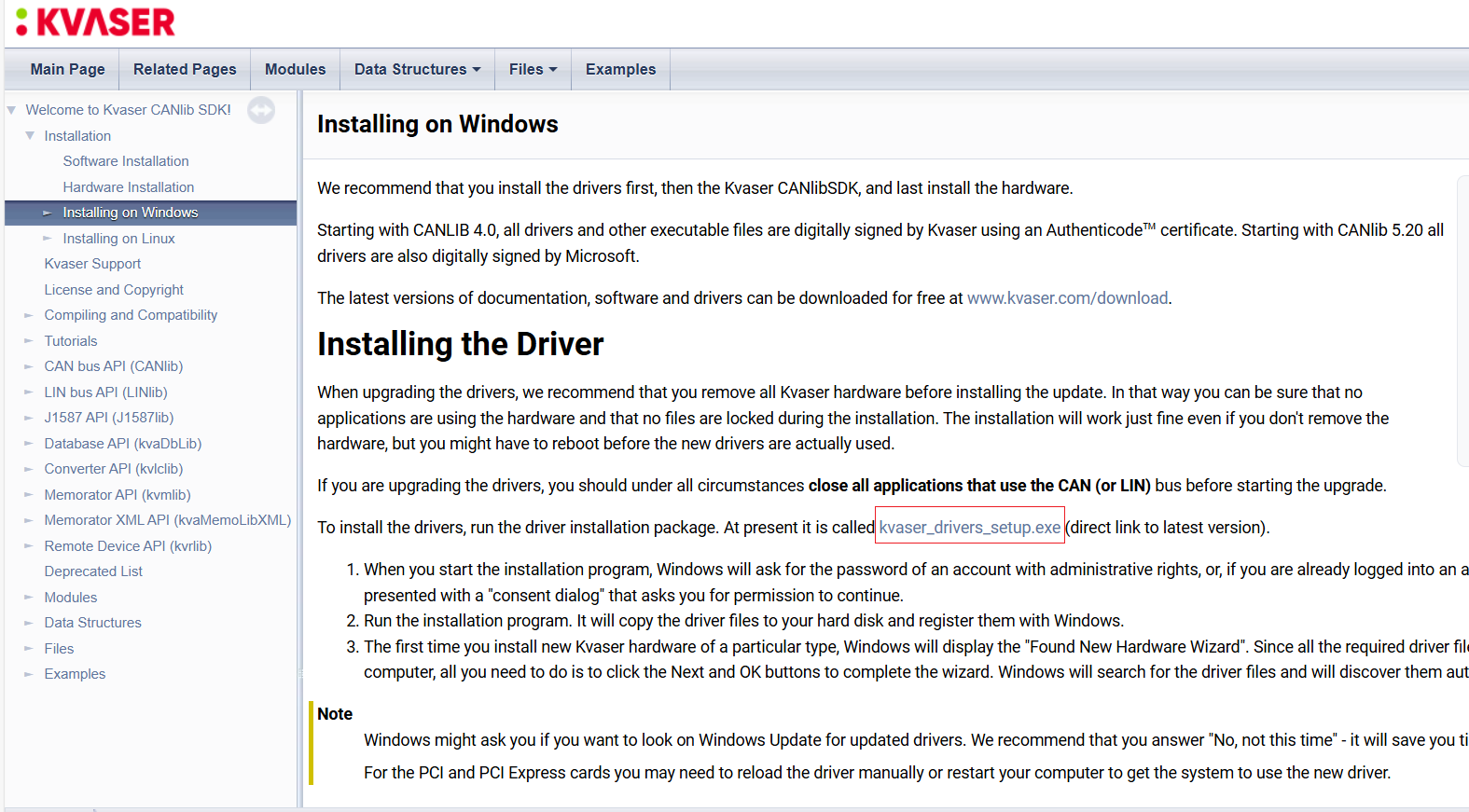
1、查看官方文档
https://kvaser.com/canlib-webhelp/section_install_windows.html
2、安装can windows驱动
https://www.kvaser.com/downloads-kvaser/?utm_source=software&utm_ean=7330130980013&utm_status=latest
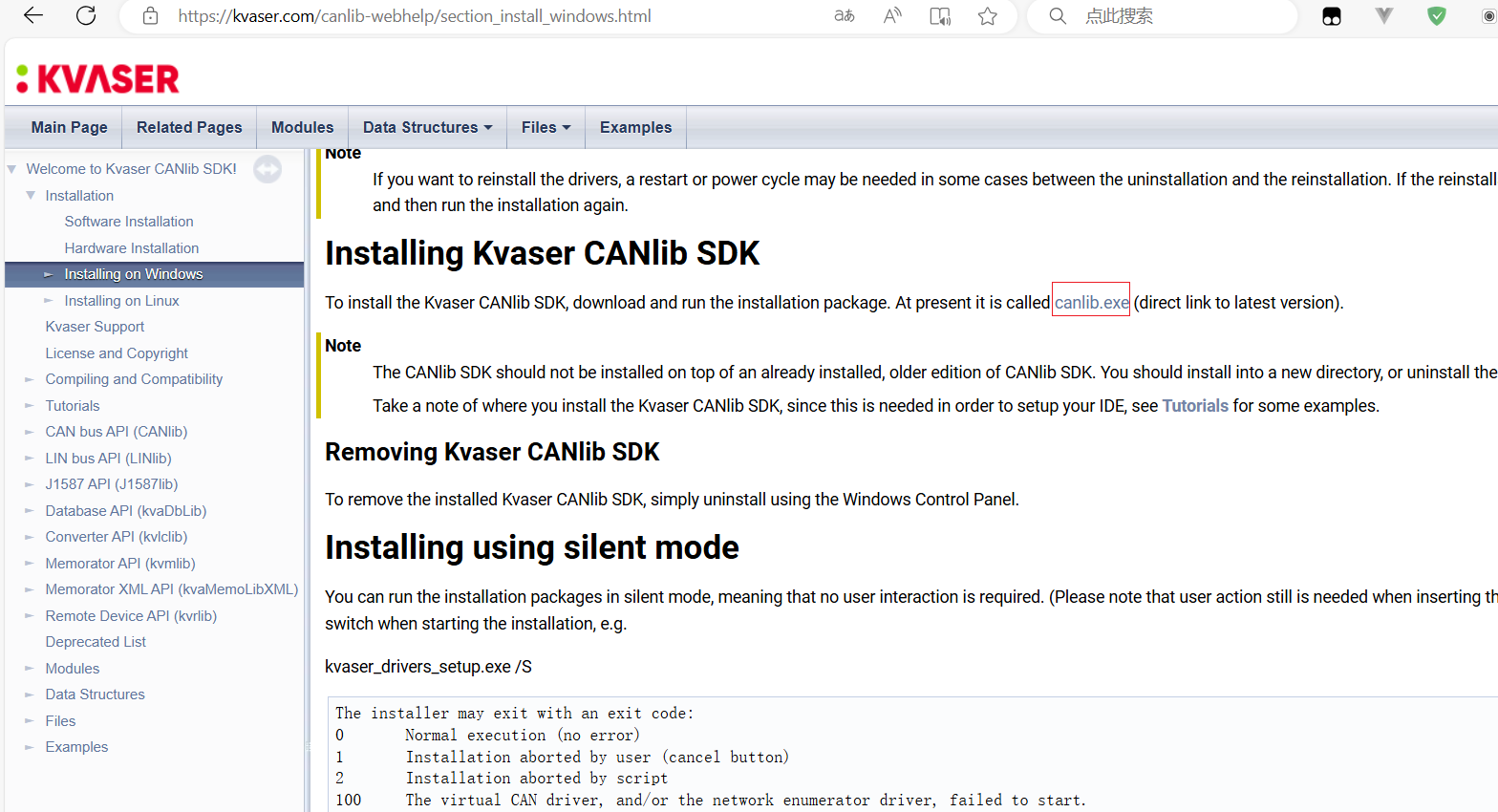
3、安装canlib
https://www.kvaser.com/downloads-kvaser/?utm_source=software&utm_ean=7330130980150&utm_status=latest
4、教程
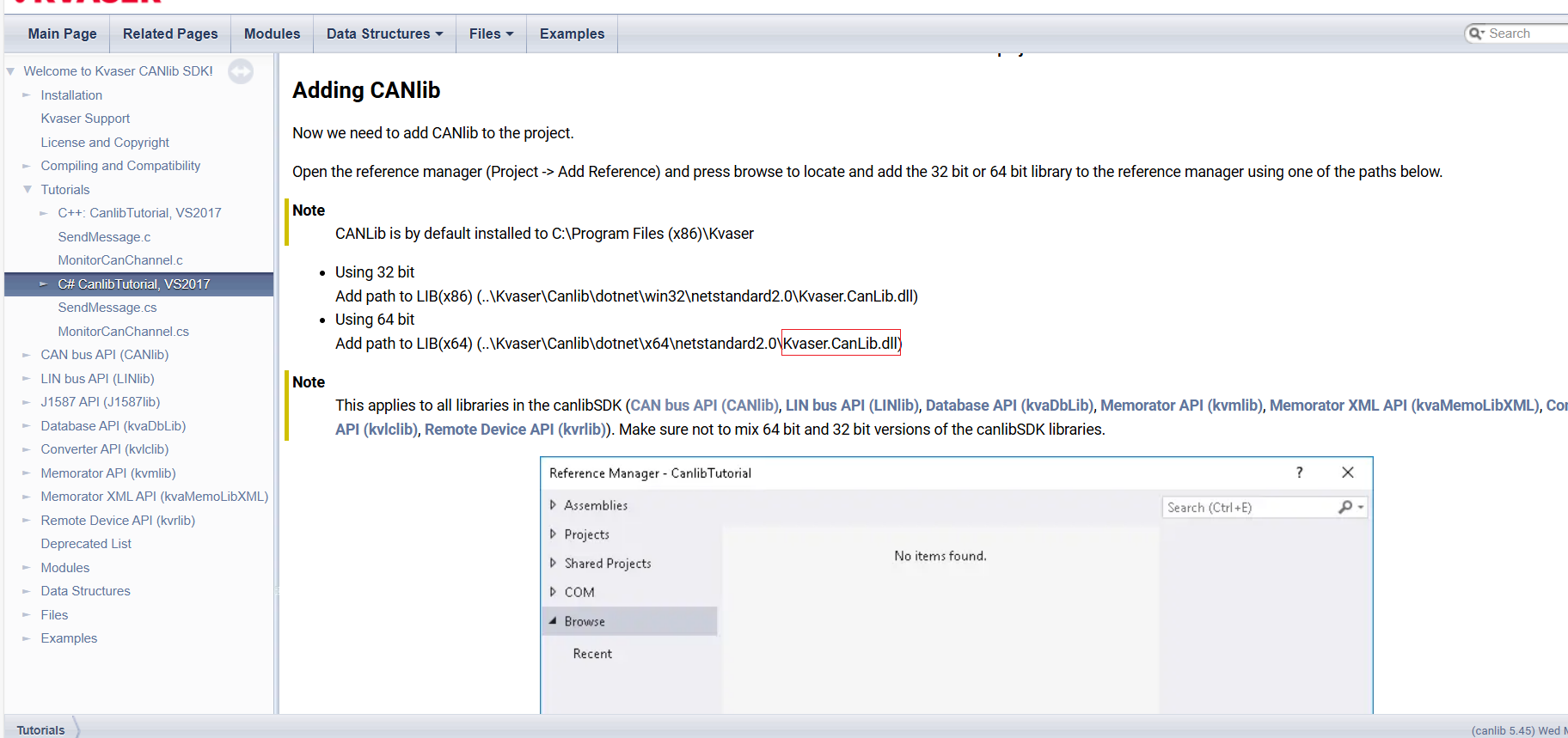
5、新建项目 引用canlib dll
C# CanlibTutorial, VS2017 (kvaser.com)
6、代码
//----------------------------------------------------------- // This is a sample program for Visual Studio 2017 CANlib tutorial. // It prints a list of connected CAN interfaces. // // For further information please refer to the tutorial section of the CANlib documentation. //----------------------------------------------------------- using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.Threading.Tasks; using Kvaser.CanLib; namespace CanlibTutorial {class Program{// When called CheckForError will check for and print any error.// Return true if an error has occured.static public bool CheckForError(string cmd, Canlib.canStatus stat){if (stat != Canlib.canStatus.canOK){Canlib.canGetErrorText(stat, out string buf);Console.WriteLine("[{0}] {1}: failed, stat={2}", cmd, buf, (int)stat);return true;}return false;}// ListChannels prints a list of all connected CAN interfaces.static public void ListChannels(){Canlib.canStatus stat;// Get number channelsstat = Canlib.canGetNumberOfChannels(out int number_of_channels);if (CheckForError("canGetNumberOfChannels", stat))return;Console.WriteLine("Found {0} channels", number_of_channels);// Loop and print all channelsfor (int i = 0; i < number_of_channels; i++){stat = Canlib.canGetChannelData(i, Canlib.canCHANNELDATA_DEVDESCR_ASCII, out object device_name);if (CheckForError("canGetChannelData", stat))return;stat = Canlib.canGetChannelData(i, Canlib.canCHANNELDATA_CHAN_NO_ON_CARD, out object device_channel);if (CheckForError("canGetChannelData", stat))return;Console.WriteLine("Found channel: {0} {1} {2}", i, device_name, ((UInt32)device_channel + 1));}}static void Main(string[] args){Canlib.canInitializeLibrary();ListChannels();// Press any key to continueConsole.ReadKey(true);}} }
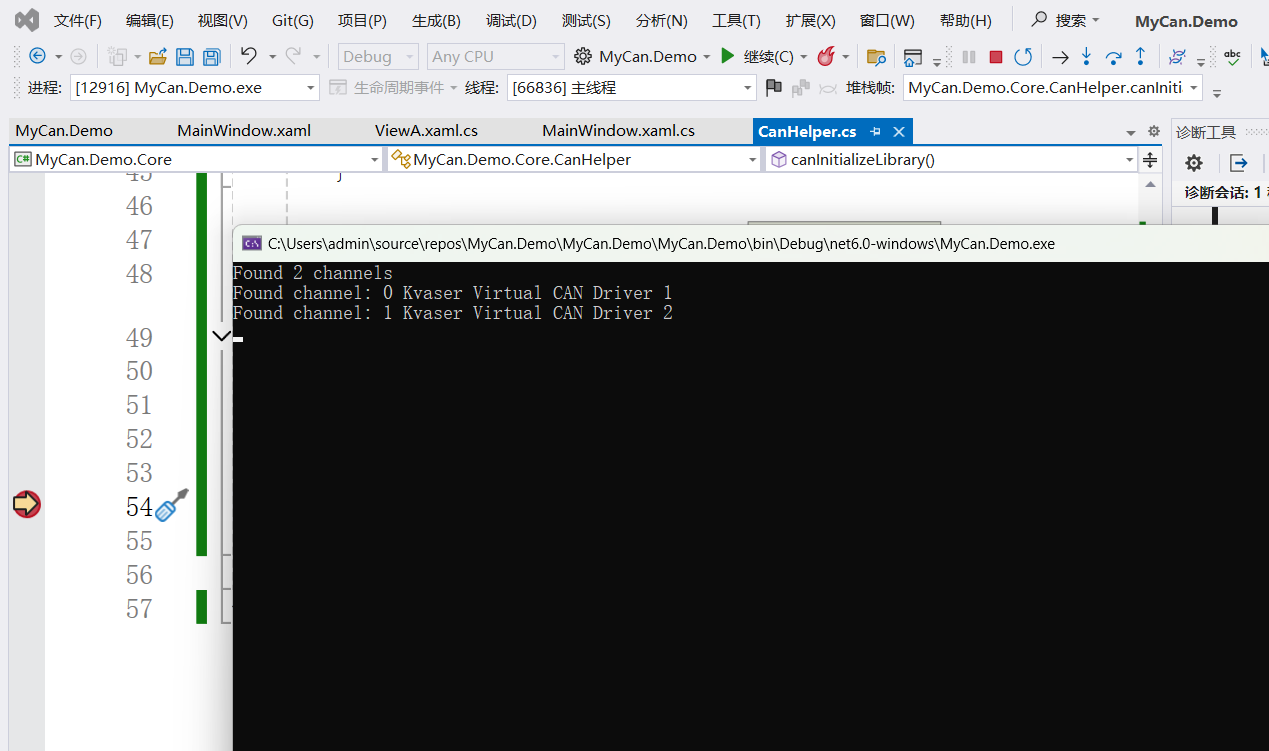
封装一下
using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.Threading; using System.Threading.Tasks; using Kvaser.CanLib;namespace MyCan.Demo.Core {public class CanHelper{ // When called CheckForError will check for and print any error.// Return true if an error has occured.public static bool CheckForError(string cmd, Canlib.canStatus stat){if (stat != Canlib.canStatus.canOK){Canlib.canGetErrorText(stat, out string buf);Console.WriteLine("[{0}] {1}: failed, stat={2}", cmd, buf, (int)stat);return true;}return false;}// ListChannels prints a list of all connected CAN interfaces.public static void ListChannels(){Canlib.canStatus stat;// Get number channelsstat = Canlib.canGetNumberOfChannels(out int number_of_channels);if (CheckForError("canGetNumberOfChannels", stat))return;Console.WriteLine("Found {0} channels", number_of_channels);// Loop and print all channelsfor (int i = 0; i < number_of_channels; i++){stat = Canlib.canGetChannelData(i, Canlib.canCHANNELDATA_DEVDESCR_ASCII, out object device_name);if (CheckForError("canGetChannelData", stat))return;stat = Canlib.canGetChannelData(i, Canlib.canCHANNELDATA_CHAN_NO_ON_CARD, out object device_channel);if (CheckForError("canGetChannelData", stat))return;Console.WriteLine("Found channel: {0} {1} {2}", i, device_name, ((UInt32)device_channel + 1));}}private static AutoResetEvent autoResetEvent = new AutoResetEvent(false);public static void canInitializeLibrary(){Canlib.canInitializeLibrary();ListChannels();// Press any key to continue autoResetEvent.WaitOne();}} }
新建控制台程序调用
CanHelper.canInitializeLibrary();
提示
其他:发送数据案例
// This tutorial walks you through how to open a channel and send a CAN message on it. using System; using System.Collections.Generic; using System.Linq; using System.Text; using Kvaser.CanLib; namespace SendMessage {class Program{static void Main(string[] args){// Holds a handle to the CAN channelint handle;// Status returned by the Canlib calls Canlib.canStatus status;// The CANlib channel number we would like to useint channelNumber = 0;// The msg will be the body of the message we send on the CAN bus.byte[] msg = {0, 1, 2, 3, 4, 5, 6, 7};Console.OutputEncoding = System.Text.Encoding.UTF8;Console.WriteLine("Initializing Canlib");// Initialize the Canlib library with a call to// Canlib.initializeLibrary(). This always needs to be done before// doing anything with the library. Canlib.canInitializeLibrary();Console.WriteLine("Opening channel {0}", channelNumber);// Next, we open up the channel and receive a handle to// it. Depending on what devices you have connected to your// computer, you might want to change the channel number. The// canOPEN_ACCEPT_VIRTUAL flag means that it is ok to open the// selected channel, even if it is on a virtual device.handle = Canlib.canOpenChannel(channelNumber, Canlib.canOPEN_ACCEPT_VIRTUAL);CheckStatus((Canlib.canStatus)handle, "canOpenChannel");Console.WriteLine("Setting channel bitrate");// Once we have successfully opened a channel, we need to set its bitrate. We// do this using canSetBusParams. CANlib provides a set of predefined bus parameter// settings in the form of canBITRATE_XXX constants. For other desired bus speeds// bus paramters have to be set manually.// See CANlib documentation for more information on parameter settings.status = Canlib.canSetBusParams(handle, Canlib.canBITRATE_250K, 0, 0, 0, 0);CheckStatus(status, "canSetBusParams");Console.WriteLine("Going on bus");// Next, take the channel on bus using the canBusOn method. This// needs to be done before we can send a message.status = Canlib.canBusOn(handle);CheckStatus(status, "canBusOn");Console.WriteLine("Writing a message to the channel");// We send the message using canWrite. This method takes five// parameters: the channel handle, the message identifier, the// message body, the message length (in bytes) and optional flags.status = Canlib.canWrite(handle, 123, msg, 8, 0);CheckStatus(status, "canWrite");Console.WriteLine("Waiting for the message to be transmitted");// After sending, we wait for at most 1000 ms for the message to be sent, using// canWriteSync.status = Canlib.canWriteSync(handle, 1000);CheckStatus(status, "canWriteSync");Console.WriteLine("Going off bus");// Once we are done using the channel, we go off bus using the// canBusOff method. It take the handle as the only argument.status = Canlib.canBusOff(handle);CheckStatus(status, "canBusOff");Console.WriteLine("Closing channel {0}", channelNumber);// We also close the channel using the canCloseChannel method,// which take the handle as the only argument.status = Canlib.canClose(handle);CheckStatus(status, "canClose");// Wait for the user to press a key before exiting, in case the// console closes automatically on exit.Console.WriteLine("Press any key to exit");Console.ReadKey();}// The check method takes a canStatus (which is an enumerable) and the method// name as a string argument. If the status is an error code, it will print it.// Most Canlib method return a status, and checking it with a method like this// is a useful practice to avoid code duplication.private static void CheckStatus(Canlib.canStatus status, string method){if (status < 0){string errorText;Canlib.canGetErrorText(status, out errorText);Console.WriteLine(method + " failed: " + errorText);}}} } /*Exercises:- The canWriteWait method combines canWrite with canWriteSync. Try it out.- Use some other program (such as Kvaser CanKing) to listen for messages on achannel connected to the one used in the program. Make sure to use the samebitrate.- Change the fourth parameter in the call to canWrite to 4. What happens tothe message on the receiving side?- Change the message identifier to something large, like 10000. What happenson the receiving side? Then, change the fifth parameter toCanlib.canMSG_EXT. What happens now? */