lab 4: 多核调度与IPC
结合IPADS OS Lab Manual一起阅读,风味更佳!
- 多核启动支持:使ChCore通过树莓派厂商所提供的固件唤醒多核执行
- 多核调度: 使ChCore实现在多核上进行round-robin调度。
- IPC:使ChCore支持进程间通信
- IPC调优:为ChCore的IPC针对测试的特点进行调优。
踩坑1: 请记得在试验前进行git fetch和git pull更新。
踩坑2: 请注意检查以下文件(链接)是否存在:
Lab4/user/chcore-libc/musl-libc/src/thread/aarch64/__thread_exit.SLab4/user/chcore-libc/musl-libc/src/thread/aarch64/__unmapself.S
不存在可以手动创造一个空的文件链接即可。(原因目前不清楚)
多核支持
思考题1
阅读Lab1中的汇编代码kernel/arch/aarch64/boot/raspi3/init/start.S。说明ChCore是如何选定主CPU,并阻塞其他其他CPU的执行的。
Ans: 源码位于:Lab1/kernel/arch/aarch64/boot/raspi3/init/start.S。
我们可以看到,在start.S中,先执行以下三行汇编代码:
mrs x8, mpidr_el1and x8, x8, #0xFFcbz x8, primary
mpidr_el1系统寄存器内存储着当前cpu的id。通过将其加载到通用寄存器中,判断其是否为cpuid:0。当其为0号cpu时(也就是选定的primary cpu),前往primary函数部分加载内核栈并进入启动流程。否则,进入到wait_for_bss_clear部分。等待primary cpu 完成初始化,清除全局变量后其他cpu再进行内核栈准备。最后,再等待smp(symmetric multi-processor,对称多处理器)发送允许启动的信号(secondary boot flag)后,再进入secondary_init_c部分,启动其他核心。
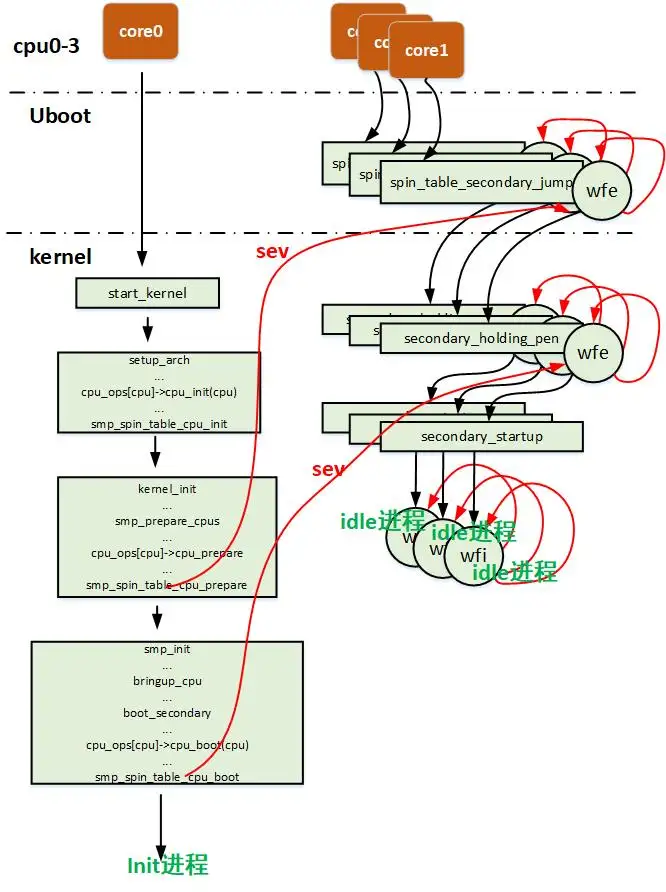
上图来自:知乎,作者:Linux内核远航者
阅读汇编代码
kernel/arch/aarch64/boot/raspi3/init/start.S,init_c.c以及kernel/arch/aarch64/main.c,解释用于阻塞其他CPU核心的secondary_boot_flag是物理地址还是虚拟地址?是如何传入函数enable_smp_cores中,又是如何赋值的(考虑虚拟地址/物理地址)?
Ans:
此处需要阅读的源码比较分散。我们将他们的相对路径写在下面:
Lab1/kernel/arch/aarch64/boot/raspi3/init/init_c.cLab1/kernel/arch/aarch64/boot/raspi3/init/start.SLab2/kernel/arch/aarch64/main.c
以上是我们可以接触到的三个部分。接下来我们来关注secondary_boot_flag。在start.S中,我们有:
wait_until_smp_enabled:/* CPU ID should be stored in x8 from the first line */mov x1, #8mul x2, x8, x1ldr x1, =secondary_boot_flagadd x1, x1, x2ldr x3, [x1]cbz x3, wait_until_smp_enabled/* Set CPU id */mov x0, x8b secondary_init_c/* Should never be here */b .
其中我们会有ldr x1, =secondary_boot_flag执行。这句语句用于将标签 secondary_boot_flag 的地址加载到寄存器 x1 中。接着,将从mpidr_el1中获得的cpuid结合后,等待smp允许该cpu启动。
- 问题一:
secondary_boot_flag是虚拟地址还是真实地址?
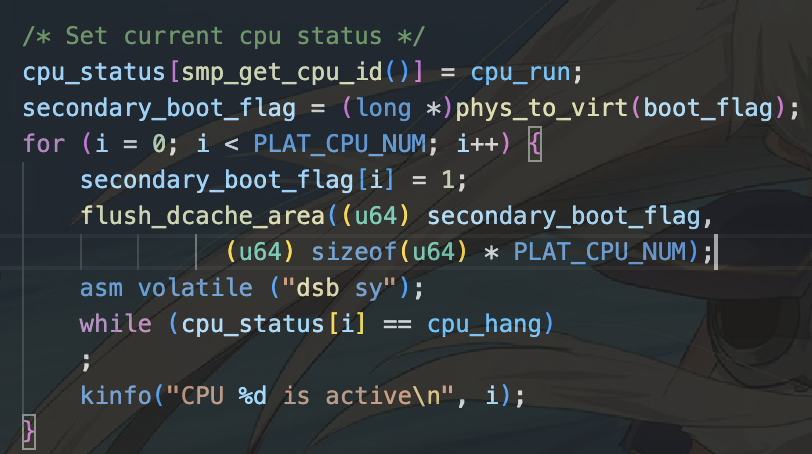
回答:虚拟地址。我们可以发现,当primary核心在启动过程中,其他核心都会被阻塞,等待能够启动的flag出现。这里primary_cpu和其他核心将会执行:
注意到start_kernel在init_c.c中并没有定义,而是定义在Lab1/kernel/arch/aarch64/boot/raspi3/include/boot.h中。在这其中,我们找到了函数的声明,但是:
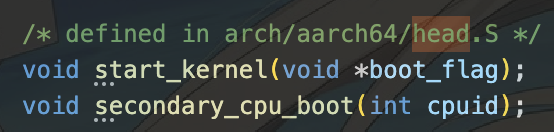
定义在head.S中,但是我们并没有对应的汇编语言文件,只有二进制obj文件,怎么办?不要慌,我们要学会逆向工程猜出这些汇编语言。这时候我们就应该用上反汇编工具aarch64-linux-gnu-objdump了。
我们在根目录下执行:aarch64-linux-gnu-objdump -D Lab1/kernel/arch/aarch64/head.S.dbg.obj > head.S可以看到我们有如下的代码:
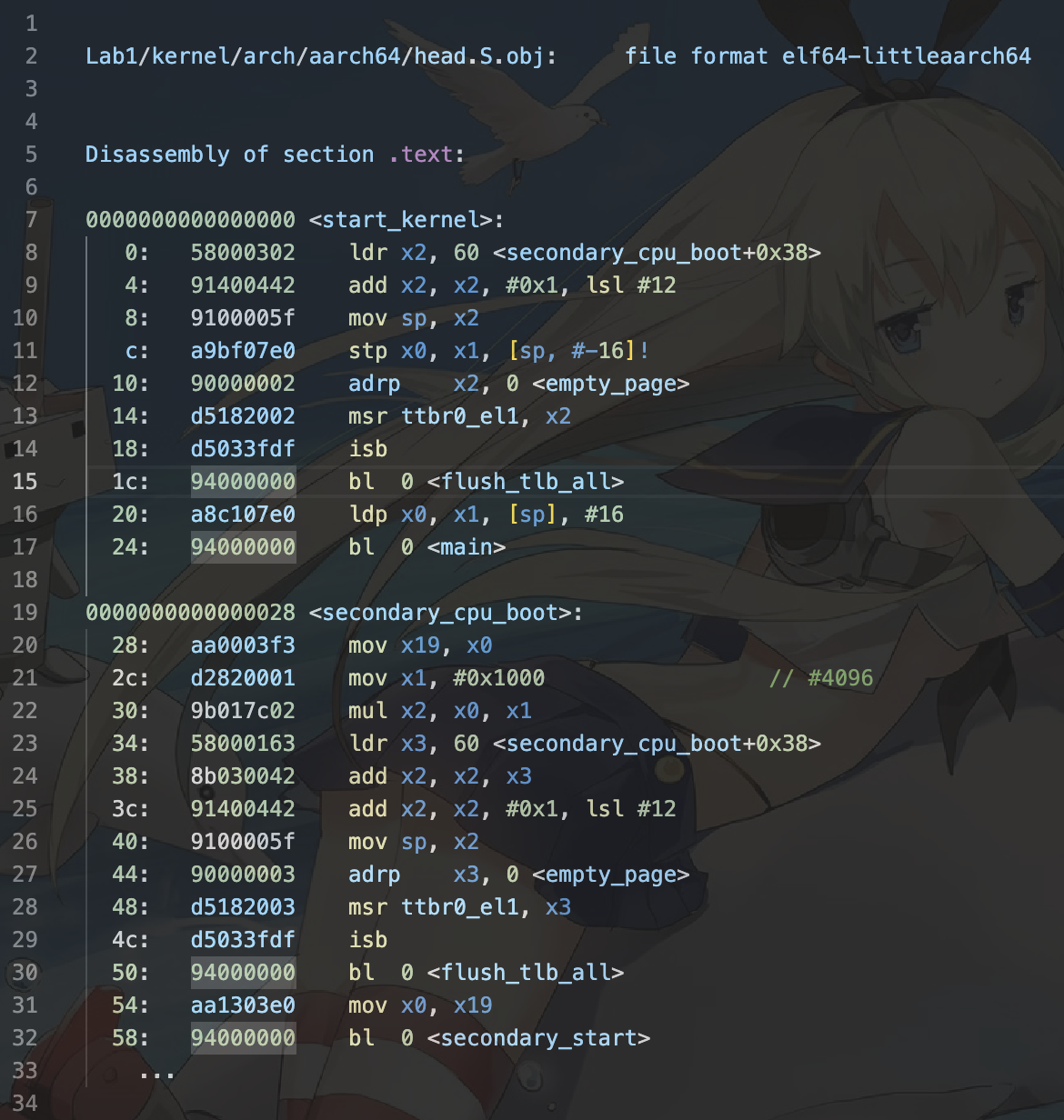
因此我们会在start_kernel内处理好基页表寄存器(用于后面配置页表),清除掉可能存在的tlb后,进入到我们的main函数中,随后进入到我们的enable_smp_cores函数中。(Lab4/kernel/arch/aarch64/machine/smp.c内有该函数定义)
接下来我们的第一个问题就很好回答了。我们的secondary_boot_flag将会以虚拟地址的方式传递给其他核心。当其他核心接收到非零的flag时,进行启动。直到唤醒所有的核心。可以参考上面的流程图。
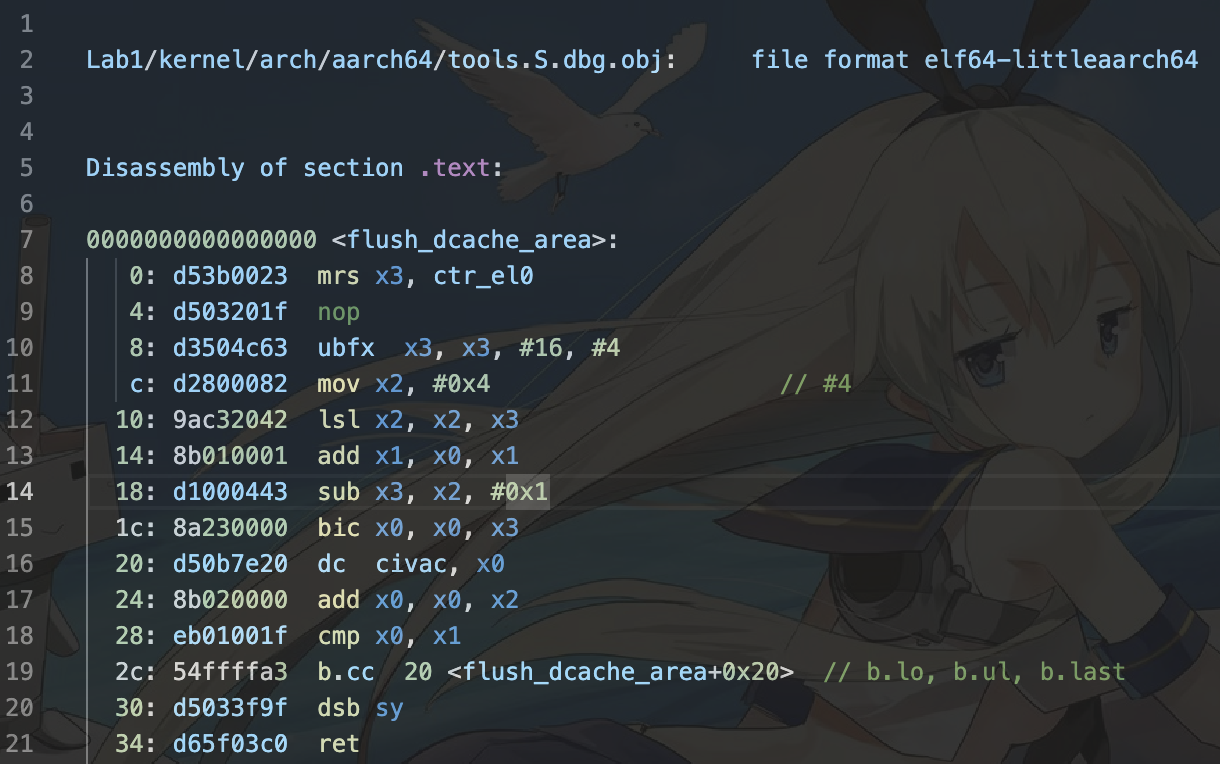
我们可以看见,利用虚拟地址,primary cpu将会一个一个循环地唤醒其他cpu。随后利用flush_dcache_area汇编函数将其传递给其他核心,以此来实现唤醒其他cpu的方式。我们可以通过:
aarch64-linux-gnu-objdump -D Lab1/kernel/arch/aarch64/tools.S.dbg.obj > tools.S
来查看该函数。
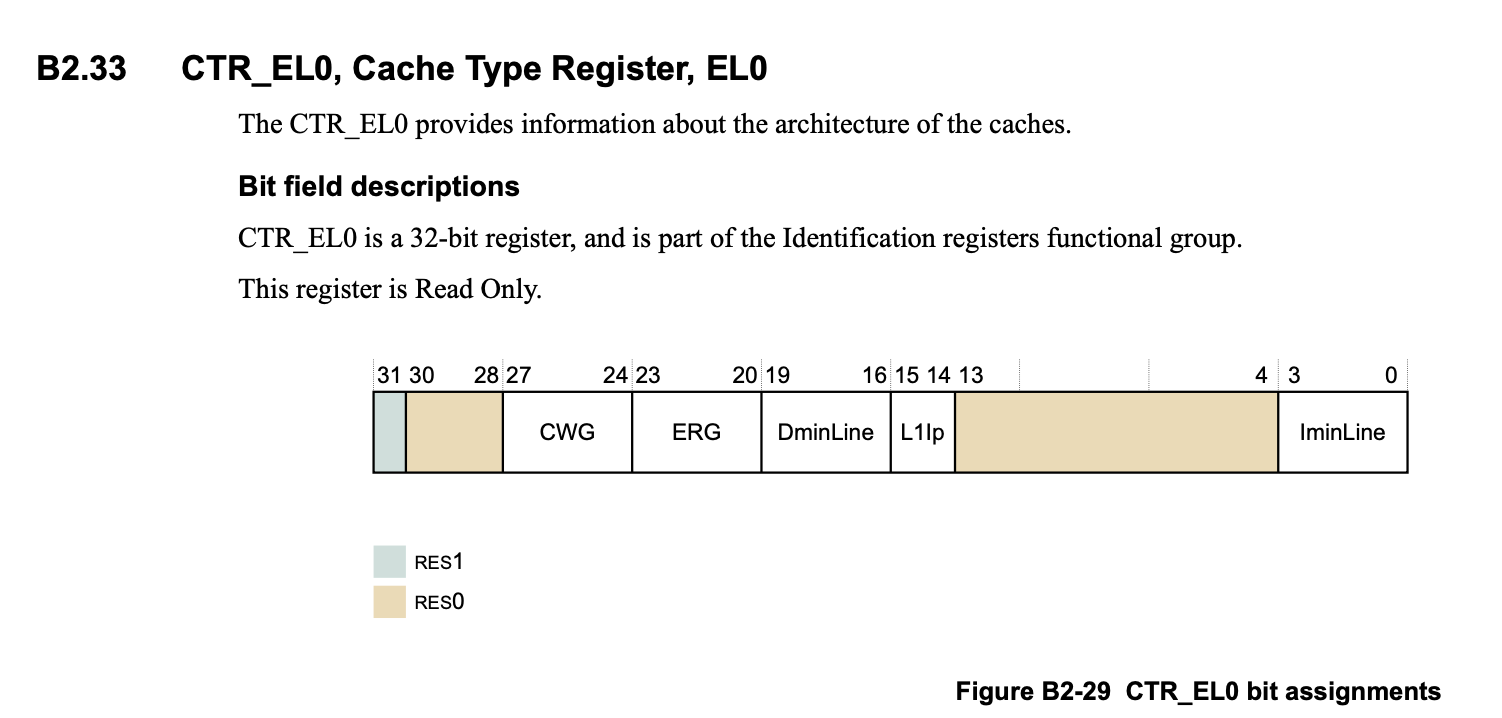
我们可以看到Chcore使用缓存类型寄存器来告诉其他核心他们的boot_flag(通过映射)。
多核调度
调度队列初始化
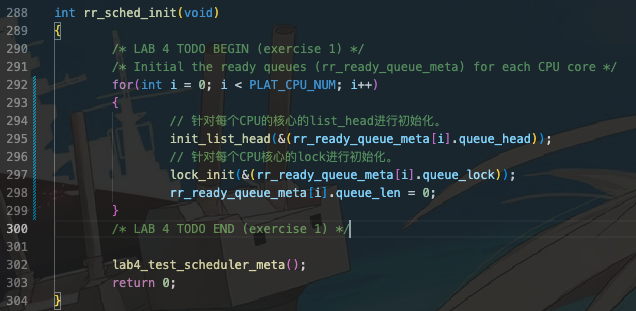
练习1: 在
kernel/sched/policy_rr.c中完善rr_sched_init函数,对rr_ready_queue_meta进行初始化。在完成填写之后,你可以看到输出“Scheduler metadata is successfully initialized!”并通过Scheduler metadata initialization测试点。
首先我们关注需要进行初始化的queue_meta结构体。
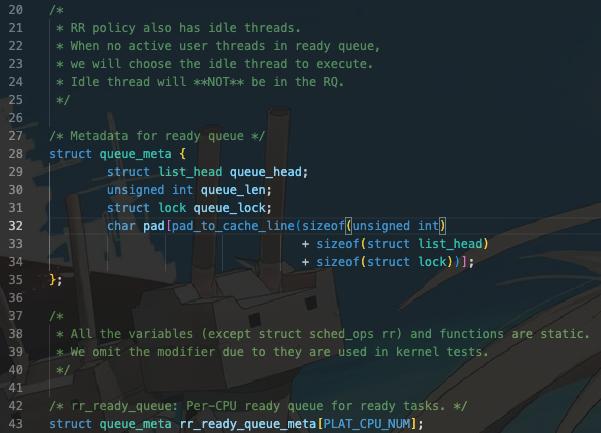
因此我们需要初始化每一个cpu的queue_meta结构体,初始化队列链表头和lock,并且确认其队伍长度初始化为0.
对于list_head结构体,我们可以在kernel/include/common/list.h中找到对应的初始化函数init_list_head函数进行初始化。对于lock结构体,我们可以找到kernel/include/common/lock.h中的lock_init函数进行初始化。队列长度每个cpu设置成0. pad部分是用于对齐的,我们可以无需关心。
// List_head 初始化。
static inline void init_list_head(struct list_head *list);
int lock_init(struct lock *lock);
在kernel/include/arch/aarch64/plat/raspi3/machine.h中可以找到对应的PLAT_CPU_NUM。因此我们有:
Ans:
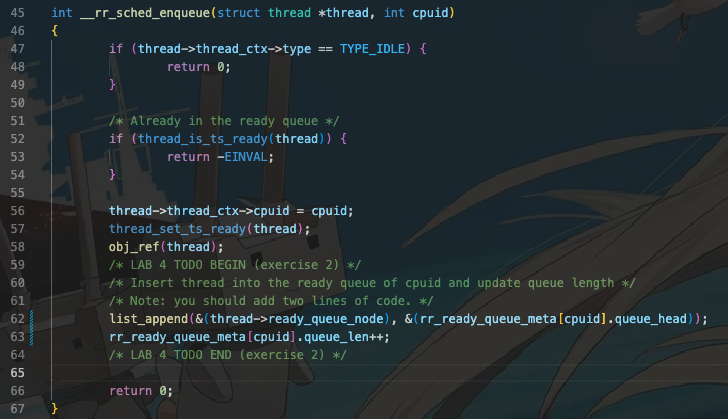
调度队列入队
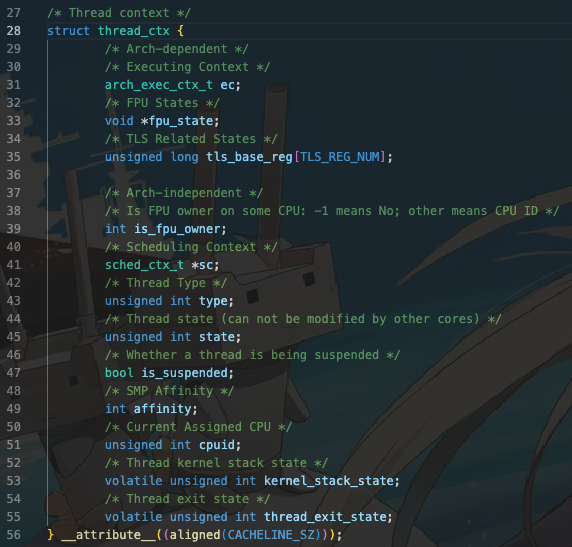
和以前的方式一样,根据链表结构找出对应成员后调用list_append即可。不要忘记增加队列长度。我们先观察thread的结构(部分):
struct thread {struct list_head node; // link threads in a same cap_groupstruct list_head ready_queue_node; // link threads in a ready queuestruct list_head notification_queue_node; // link threads in a notification waiting queuestruct thread_ctx *thread_ctx; // thread control block...
};
这样我们就可以做如下操作:
调度队列出队
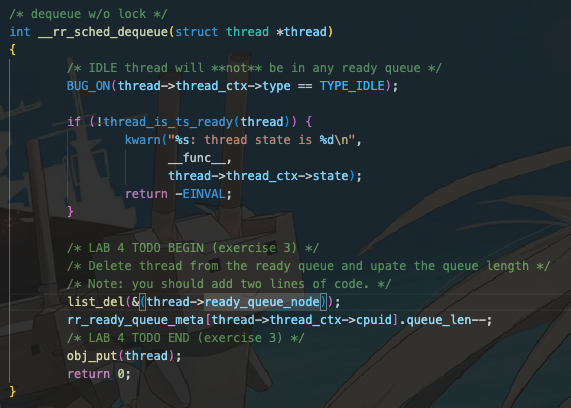
在
kernel/sched/sched.c中完善find_runnable_thread函数,在就绪队列中找到第一个满足运行条件的线程并返回。 在kernel/sched/policy_rr.c中完善__rr_sched_dequeue函数,将被选中的线程从就绪队列中移除。
我们先完成后面一部分。
如法炮制,调用list_del函数就可以了。注意我们可以从线程的上下文中寻找对应的cpuid。我们有:
我们可以进行如下操作:
Ans2:
接着完成find_runnable_thread函数。
首先,我们需要了解如何使用for_each_in_list接口,定义在kernel/include/common/list.h中:
#define for_each_in_list(elem, type, field, head) \for ((elem) = container_of((head)->next, type, field); \&((elem)->field) != (head); \(elem) = container_of(((elem)->field).next, type, field))
需要我们传入四个元素:需要返回结构体对应的对象elem,type为需要转换成的结构体,field为等待转换的元素对应结构体的成员信息,head头节点,用于定义循环起点。
我们需要确定四个元素应该怎么填写。首先观察函数struct head * rr_sched_choose_thread(void)是如何传入参数,也就是链表头的:
if (!(thread = find_runnable_thread(&(rr_ready_queue_meta[cpuid].queue_head)))) {unlock(&(rr_ready_queue_m[cpuid].queue_lock));goto out;}
可以发现传入的是ready_queue中的thread链表头。我们需要从中寻找到thread。
继续观察thread,与ready_queue相关的元素为struct list_head ready_queue_node。因此我们的field即为ready_queue_node。type即为我们需要的struct thread。
这样我们就有:
Ans 1:
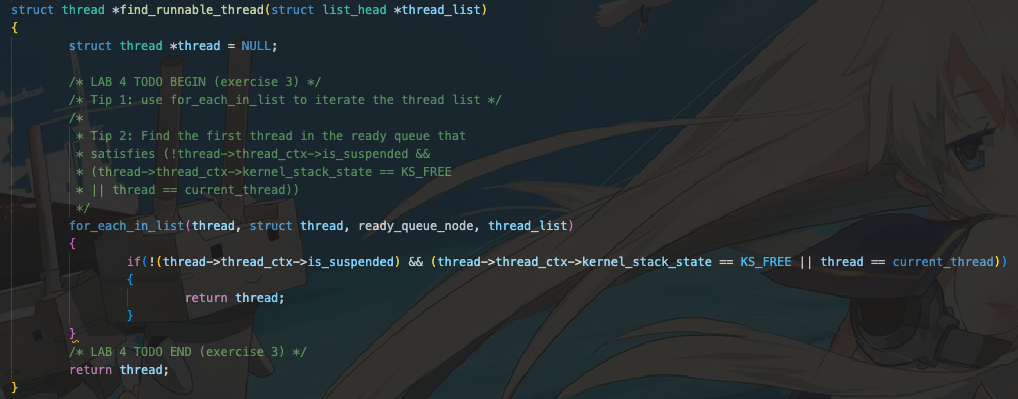
相当于每次从链表中取出一个节点,转换成thread结构体,判断是否符合条件后返回。
协作式调度
在
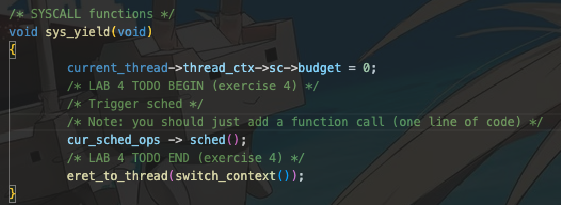
kernel/sched/sched.c中完善系统调用sys_yield,使用户态程序可以主动让出CPU核心触发线程调度。 此外,请在kernel/sched/policy_rr.c中完善rr_sched函数,将当前运行的线程重新加入调度队列中。
首先我们先观察我们需要进行的系统调用。我们可以看到下面的函数sys_top()和我们的sys_yield一样是系统调用函数。结合《操作系统:原理与实现》上第212页的内容,我们可以在 kernel/include/sched/sched.h 中看到所有的调度操作接口:
struct sched_ops {int (*sched_init)(void); // 初始化调度系统。int (*sched)(void); // 触发一次当前cpu核心上的调度。int (*sched_periodic)(void); // 与rr调度有关,周期性触发调度。int (*sched_enqueue)(struct thread *thread);int (*sched_dequeue)(struct thread *thread);// 入队和出队操作。/* Debug tools */void (*sched_top)(void);
};
这样我们需要调用的则为cur_sched_ops -> sched()函数。这样我们有:
Ans1:
接下来完善我们的rr_sched()函数。我们直接入队即可。
Ans2:

抢占式调度
请根据代码中的注释在
kernel/arch/aarch64/plat/raspi3/irq/timer.c中完善plat_timer_init函数,初始化物理时钟。需要完成的步骤有:
- 读取 CNTFRQ_EL0 寄存器,为全局变量 cntp_freq 赋值。
- 根据 TICK_MS(由ChCore决定的时钟中断的时间间隔,以ms为单位,ChCore默认每10ms触发一次时钟中断)和cntfrq_el0 (即物理时钟的频率)计算每两次时钟中断之间 system count 的增长量,将其赋值给 cntp_tval 全局变量,并将 cntp_tval 写入 CNTP_TVAL_EL0 寄存器!
- 根据上述说明配置控制寄存器CNTP_CTL_EL0。
我们一步步来进行。
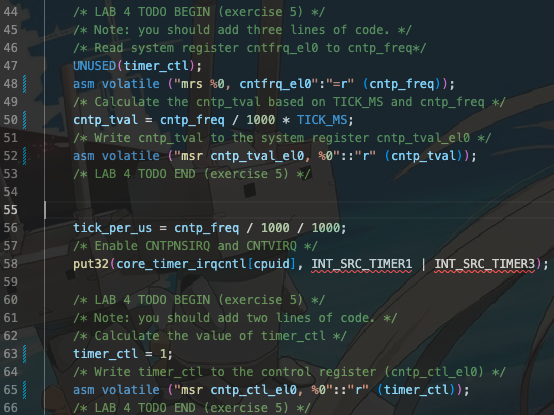
读取 CNTFRQ_EL0 寄存器,为全局变量 cntp_freq 赋值。
首先我们参考plat_time_init中,Line 41-42,就可以发现其完成的工作是将cntpct_el0的值写入到全局变量cntp_init中。照抄我们就可以实现第一步:
asm volatile ("mrs %0, cntfrq_el0":"=r" (cntp_freq));
// 用于debug,可以不抄下行。
kdebug("timer init cntpct_el0 = %lu\n", cntp_freq);
接下来进行第二步。
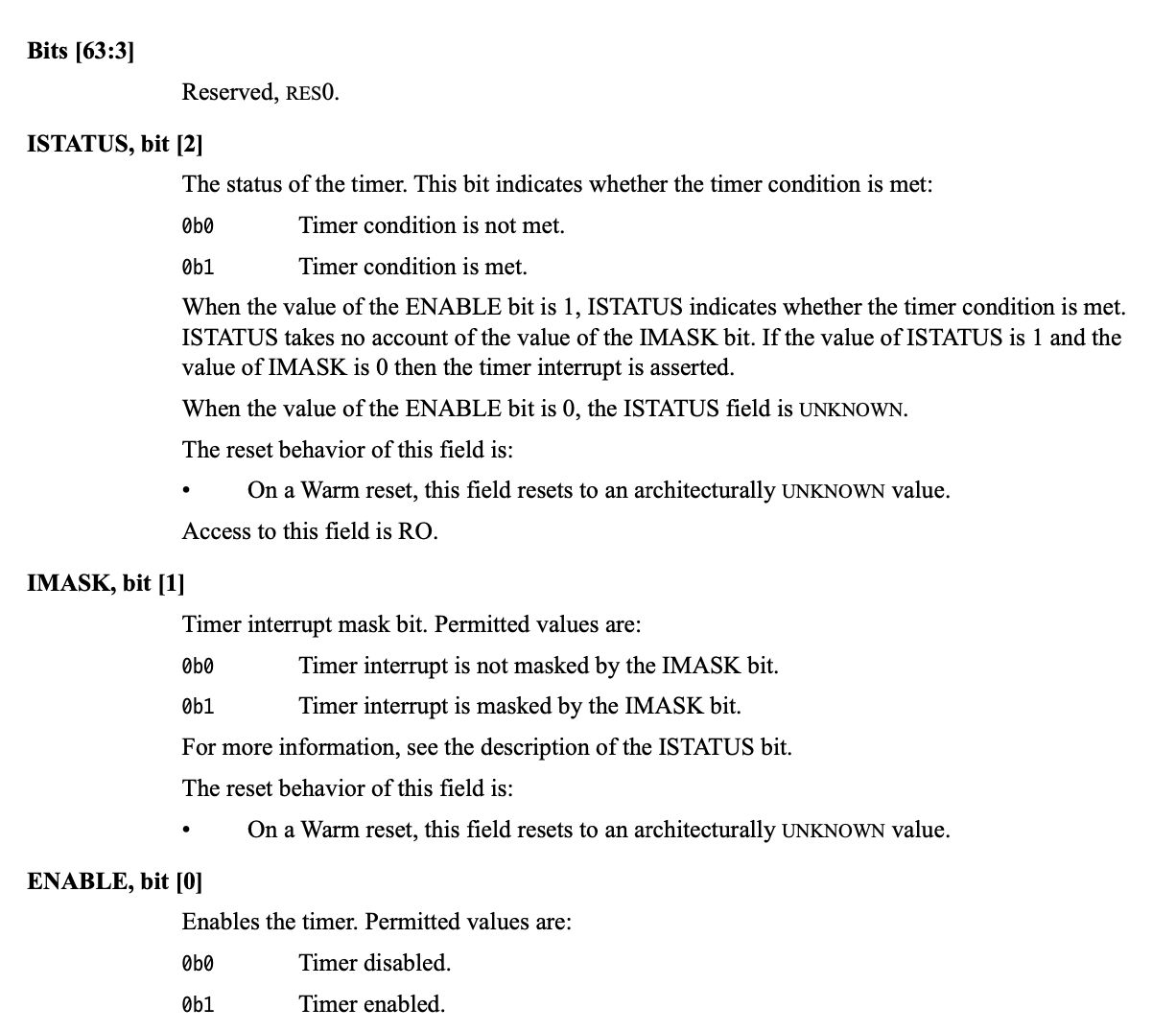
根据 TICK_MS(由ChCore决定的时钟中断的时间间隔,以ms为单位,ChCore默认每10ms触发一次时钟中断)和cntfrq_el0 (即物理时钟的频率)计算每两次时钟中断之间 system count 的增长量,将其赋值给 cntp_tval 全局变量,并将 cntp_tval 写入 CNTP_TVAL_EL0 寄存器。
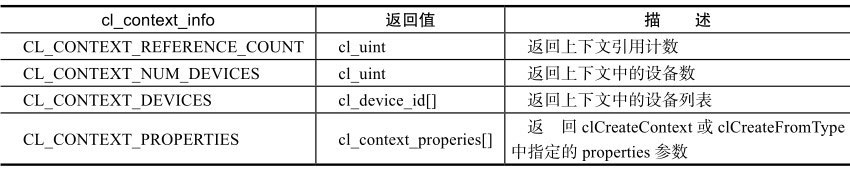
我们需要对cntp_val进行计算,这取决于cntp_freq和TICK_MS.我们首先先诉诸我们的体系结构资料:
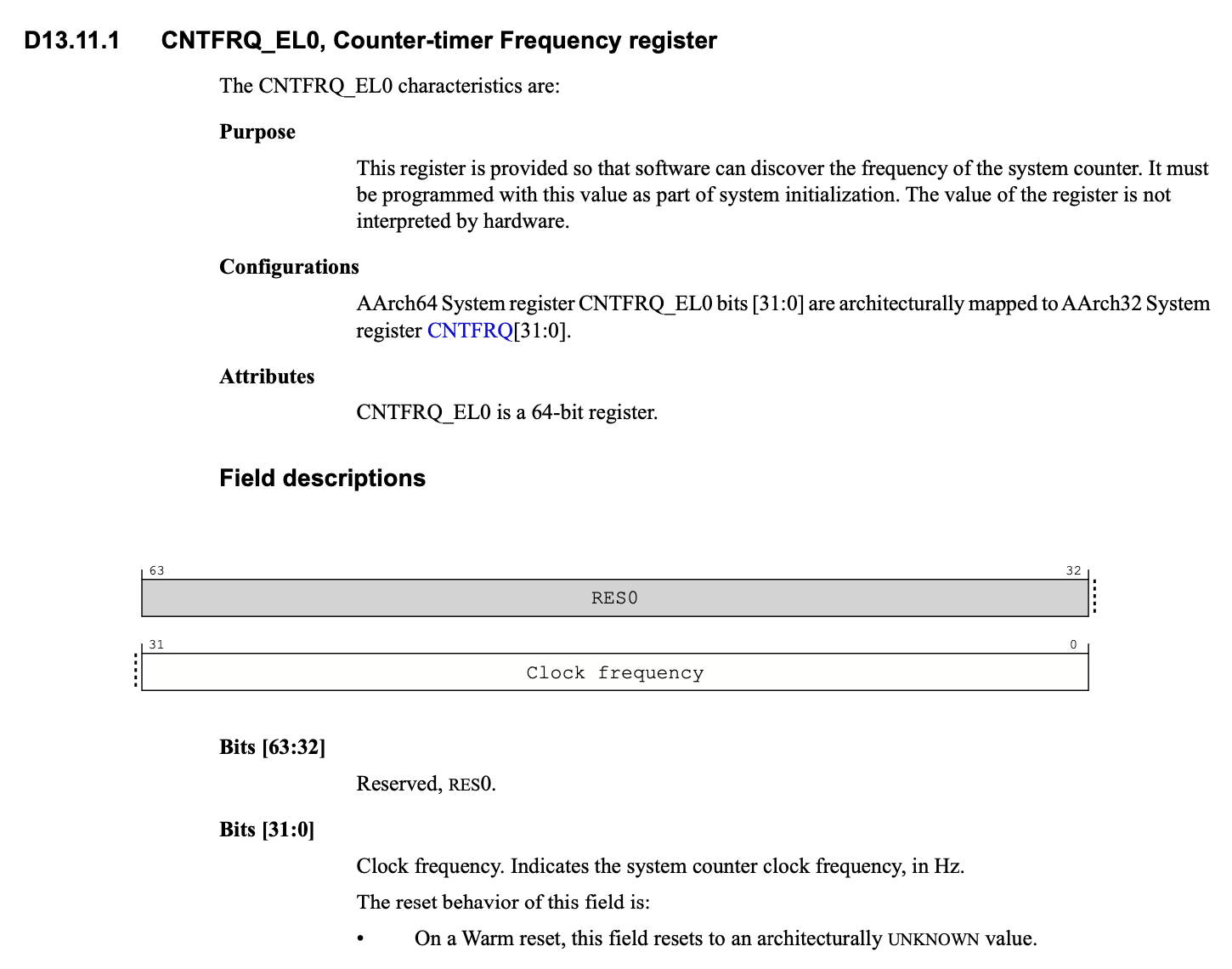
可以发现我们的时钟频率是Hz,则我们需要将其转换成ms制单位,也就是除以1000,将其乘以TICK_MS得到真实的在两次中断中时钟信号的反转次数,也就是system count,最后如法炮制写入系统寄存器 cntp_tval_el0。
这样我们有:
cntp_tval = cntp_freq / 1000 * TICK_MS;
asm volatile ("msr cntp_tval_el0, %0"::"r" (cntp_tval));
- 根据上述说明配置控制寄存器CNTP_CTL_EL0。
接下来我么需要计算time_ctl。这里我们还是需要诉诸体系结构。我们有:
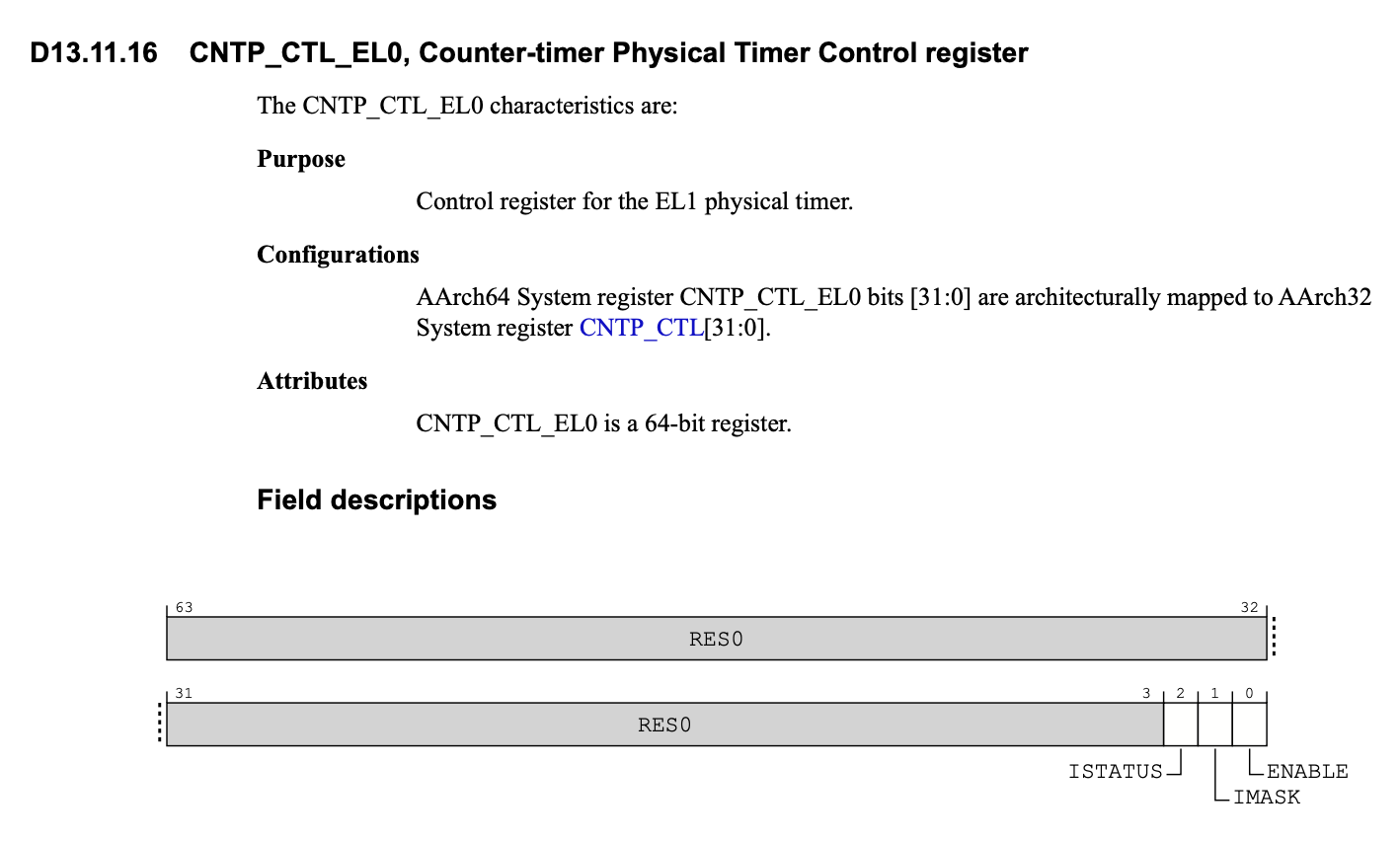
我们需要的是启用时钟并且不屏蔽时钟中断。因此将64位的time_ctl设置为1即可。最后写入系统寄存器cntp_ctl_el0。
/* Calculate the value of timer_ctl */timer_ctl = 1;/* Write timer_ctl to the control register (cntp_ctl_el0) */asm volatile ("msr cntp_ctl_el0, %0"::"r" (timer_ctl));
Ans:
物理时钟中断和抢占
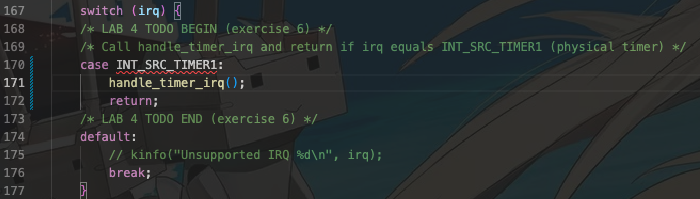
请在
kernel/arch/aarch64/plat/raspi3/irq/irq.c中完善plat_handle_irq函数,当中断号irq为INT_SRC_TIMER1(代表中断源为物理时钟)时调用handle_timer_irq并返回。请在kernel/irq/timer.c中完善handle_timer_irq函数,递减当前运行线程的时间片budget。 请在kernel/sched/policy_rr.c中完善rr_sched函数,在将当前运行线程重新加入就绪队列之前,恢复其调度时间片budget为DEFAULT_BUDGET。
这是三个问题呀!!!QAQ
首先第一步需要在INT_SRC_TIMER1情况下调用
handle_timer_irq。这样我们有:
Ans1:
接下来我们将完善handle_timer_irq。这个函数位于kernel/irq/timer.c内。
我们需要
- 递减当前运行线程时间片budget.
- 调用sched函数触发调度。
参考注释,注意到需要判断当前的thread是否为空。如果不为空则需要对budget进行处理,然后调用sched。注意current_thread定义在kernel/include/object/thread.h中。
/* Per-CPU variable current_thread is only accessed by its owner CPU. */
#define current_thread (current_threads[smp_get_cpu_id()])
// 返回值的类型为:struct thread *.
首先观察thread下的badge在哪里。我们需要观察三个文件:
kernel/include/object/thread.hkernel/include/sched/context.h
可以发现有:thread -> thread_ctx -> sc -> budget。
参考注释,我们不需要在handle_timer_irq内进行sched()操作。因此我们进行如下操作:
Ans2:

注意!这里不需要在内部进行调用sched!
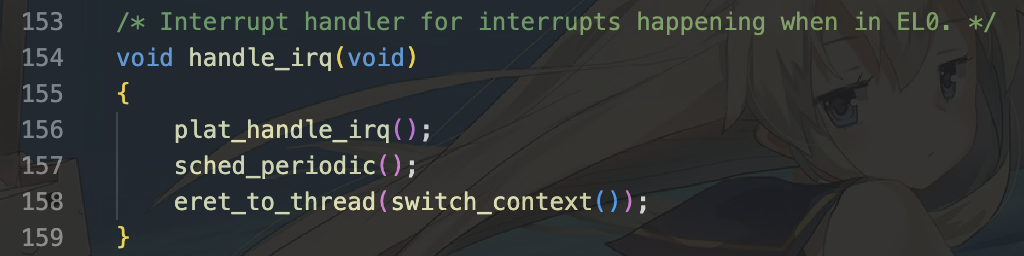
- 首先,中断来源于物理时钟。随后陷入
kernel/arch/aarch64/irq/irq_entry.S中进行中断处理。我们可以看到在如下进入了handle_irq函数。
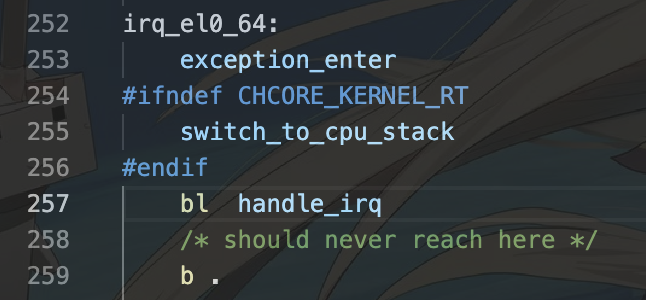
- 其次,将会进入到
kernel/arch/aarch64/irq/irq_entry.c中执行plat_handle_irq函数。在这里面,有我们配置好的在中断号irq为INT_SRC_TIMER1(代表中断源为物理时钟)时调用handle_timer_irq并返回。如果handle_timer_irq内我们进行了调度,则会影响到下图157行的调度,导致线程错误。最终导致segment_fault.
最后是在kernel/sched/policy_rr.c内refill budget后才入队。refill_budget就定义在该文件中。我们就有:
Ans3:

进程间通信IPC
在
user/chcore-libc/musl-libc/src/chcore-port/ipc.c与kernel/ipc/connection.c中实现了大多数IPC相关的代码,请根据注释补全kernel/ipc/connection.c中的代码。
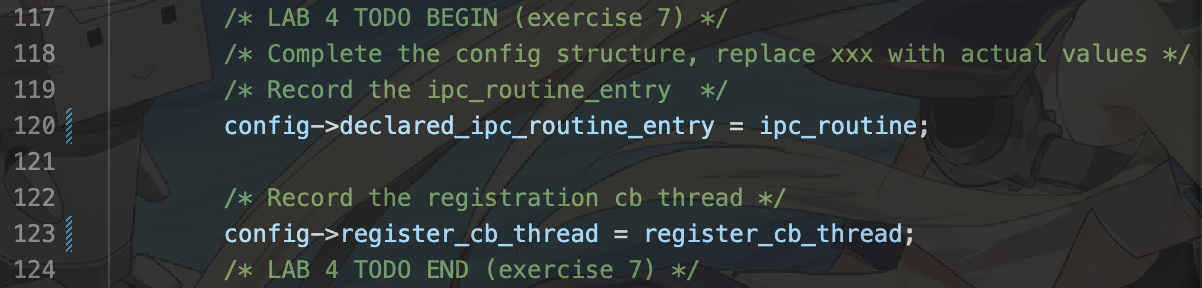
我们一步步进行。首先,第一步需要在register_server内进行,配置好
config的default_ipc_routine和register_cb_thread字段。于是我们有:
Ans1:
接下来我们需要完成函数create_connection.注意观察传入的参数。
static int create_connection(struct thread *client,struct thread *server,int shm_cap_client, unsigned long shm_addr_client,struct client_connection_result *res);
因此我们根据注释配置四个字段。
Ans2:

接下来完成 ipc_thread_migrate_to_server.
static void ipc_thread_migrate_to_server(struct ipc_connection *conn,unsigned long shm_addr,size_t shm_size, unsigned int cap_num);
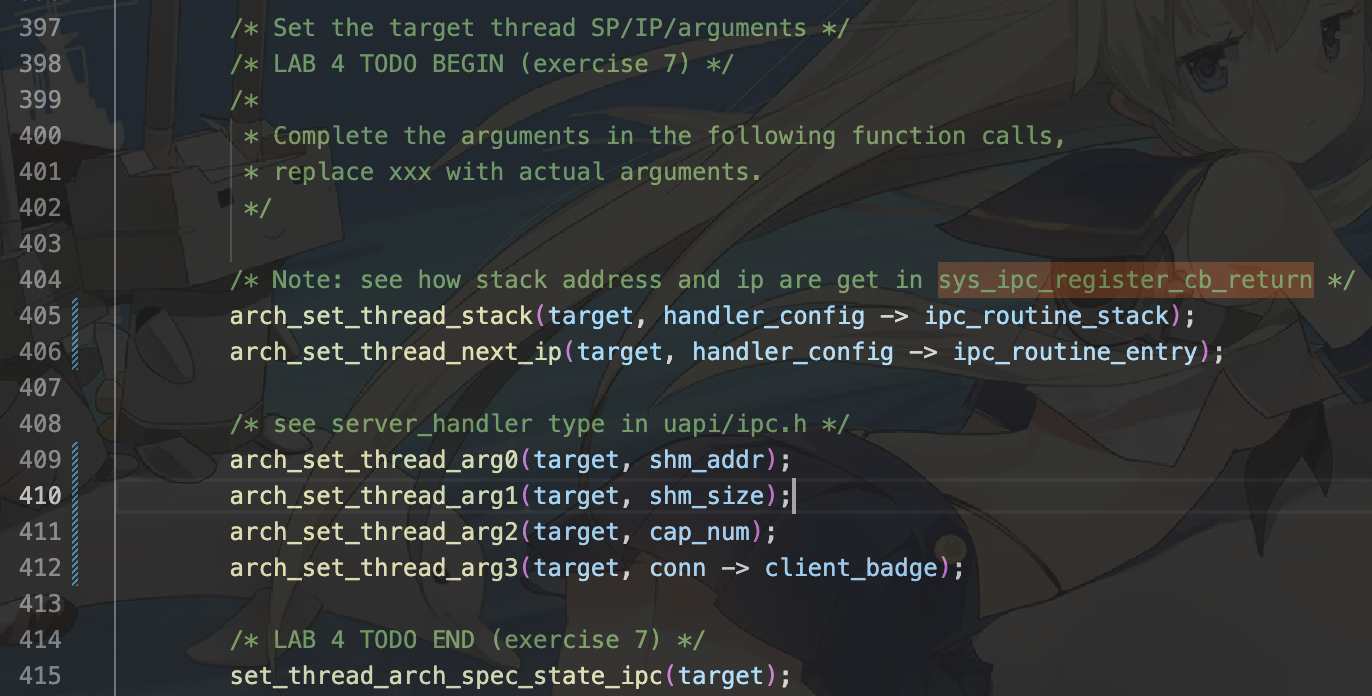
首先,根据注释参考函数sys_ipc_register_cb_return。从中我们可以得到以下信息:
handler_config->ipc_routine_entry =arch_get_thread_next_ip(ipc_server_handler_thread);
handler_config->ipc_routine_stack =arch_get_thread_stack(ipc_server_handler_thread);
这样我们就可以获得stack和next_ip在config内的成员是什么。
接下来我们需要了解kernel/user-include/uapi/ipc.h。
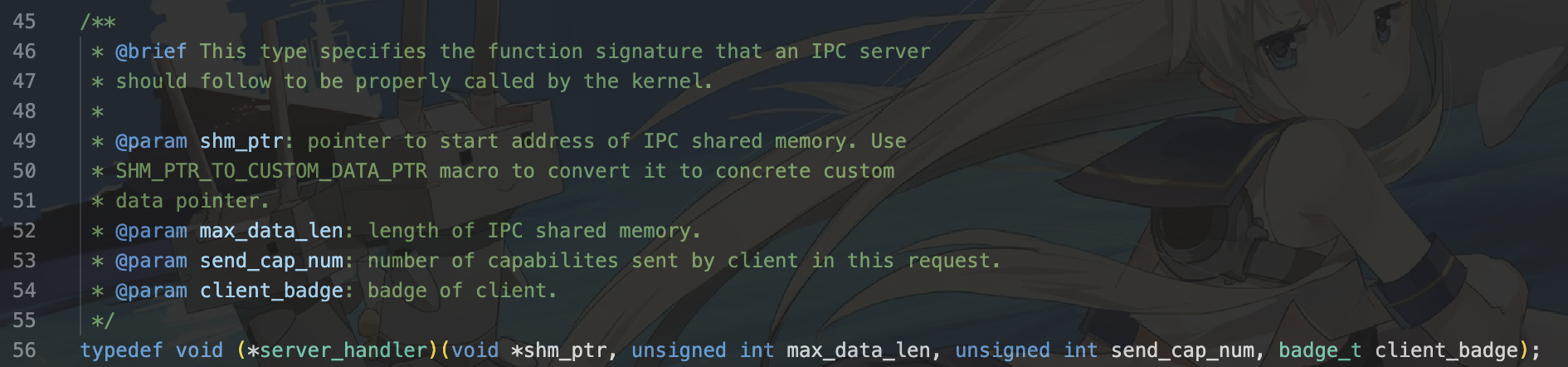
这样我们就可以分别填写四个参数。第一个为共享内存的起始地址。因此为shm_addr.第二个为共享内存的大小。因此我们可以填写shm_size.第三个为客户端发送的能力组号。因此我们填写cap_num。最后是通信中的badge号。这样我们就完成了这一部分。
Ans3:
接下来完成sys_register_client函数。
cap_t sys_register_client(cap_t server_cap, unsigned long shm_config_ptr);
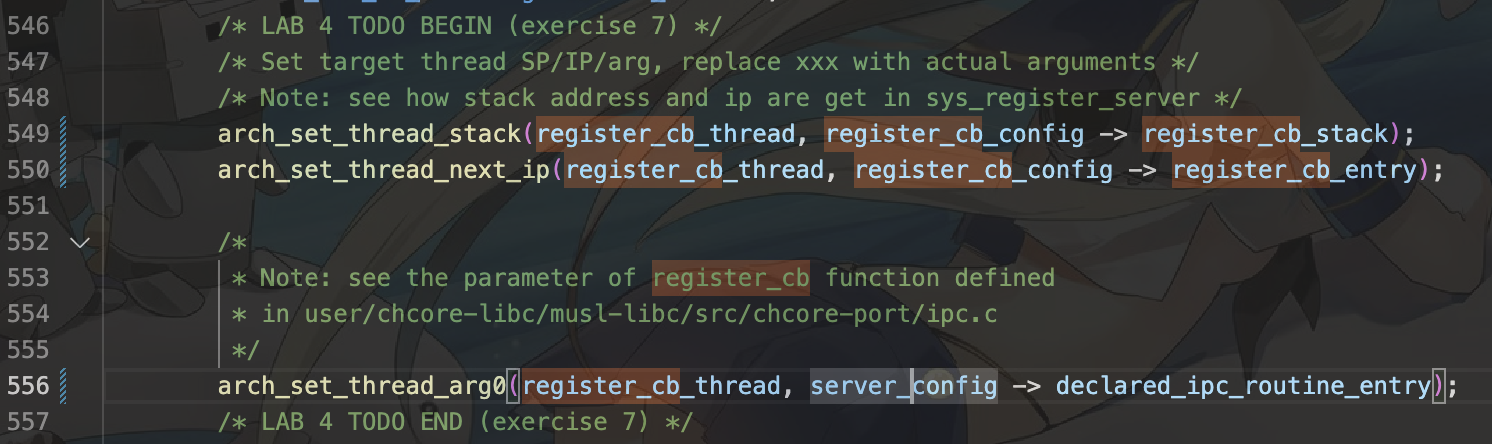
前两行设置线程栈和ip与上面相同。接下来我们需要去观察在user/chcore-libc/musl-libc/src/chcore-port/ipc.c定义的函数.这里主要是设置好服务配置(server_config)中已经填写好的服务端入口。因此应该填写server_config -> declared_ipc_routine_entry。
Ans4:
接下来我们完成sys_ipc_register_cb_return部分。
int sys_ipc_register_cb_return(cap_t server_handler_thread_cap,unsigned long server_thread_exit_routine,unsigned long server_shm_addr);
填写一行即可。
Ans5:

一時的な終わり
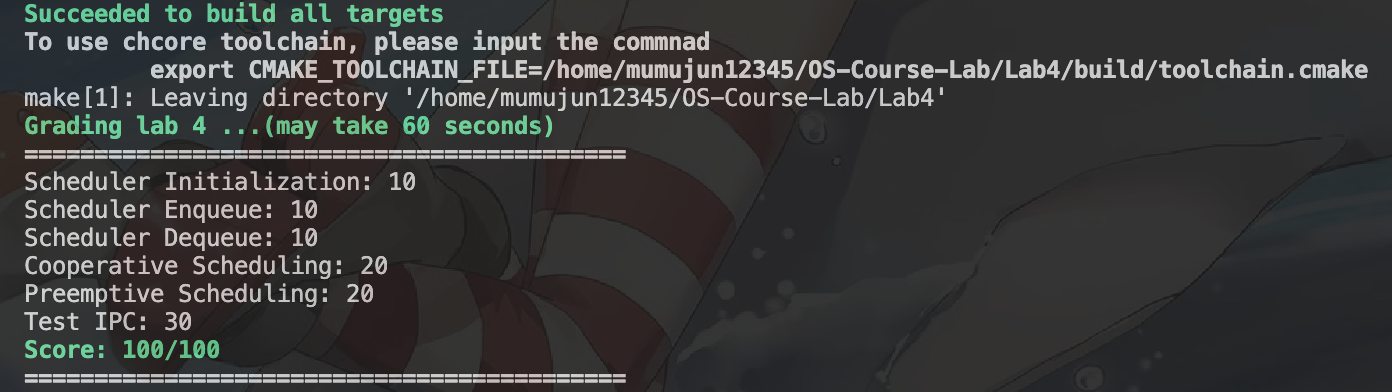
到这里就暂时告一段落了,成功的结果你将看到如下所示:

优化部分因人而异,因此后面如果作者有时间将会提供优化部分的一些想法。